

MEMS传感器在先进移动设备上的应用
MEMS/传感技术
描述
MEMS传感器包括加速度计(ACC)、陀螺仪(GYRO)、磁力计(MAG)、压力传感器(PS)和话筒(MIC)。因为低成本,小尺寸,低功耗,高性能,MEMS传感器近几年来被集成到便携设备内。
本文将论述MEMS传感器在先进移动应用中的作用,例如,移动增强实境(MAR)、定位服务(LBS)和利用航位推算法确定方位的MEMS传感器与GPS接收器整合解决方案。
1.增强实境
增强实境(AR)不是一个新话题。根据定义,增强实境是在一个实时显示的真实环境上叠加图形、声音和其它感知强化技术并使其具有互动性和可操纵性的功能或用户界面。在一个真实环境内融合3D虚拟信息有助于提高用户对虚拟目标周围环境的真实感。
最近增强实境技术出现了几个成功的应用案例。例如,汽车安全设备把路况和汽车周围情况的信息投射到前档风玻璃上,让驾驶员对汽车所在位置有一个全面了解。另一个应用示例是把智能手机对准一个方位已知的目标,例如饭店或超市,手机就会显示所指目标的信息。此外,如果你身处一个陌生的大城市,这个功能还能帮助你找到最近的地铁站,只要把手机旋转360度,即可锁定地铁路线,沿所指方向到达目的地。
社交网络在现代人的生活中扮演着重要作用。当一个人接近一个购物中心时,他可以用手机指向购物中心。然后,他的朋友将会收到经过数字处理技术强化的他所在位置和周边环境的虚拟信息。反之亦然,他也会收到他朋友的方位和周边信息。因此,增强实境是一种改变人们对真实世界的感觉的新方式。
由于智能手机市场高速增长,移动设备开始兴起增强实境应用。图1所示是在智能手机内实现移动增强实境所需的关键组件。
图 1: 智能手机的移动增强实境系统结构
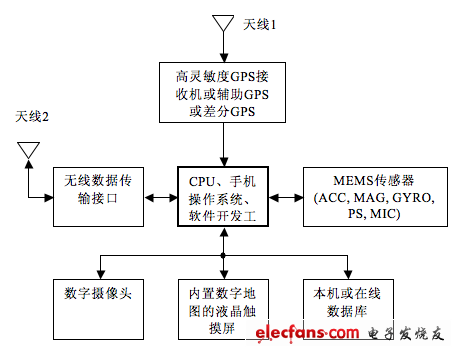
•数字摄像头:用于传送真实世界环境的信息流,并在液晶触摸屏上显示捕获的视频。目前新款智能手机上已配备500万像素或更高分辨率的成像传感器。
•CPU、手机操作系统、用户界面和软件开发工具:这些是智能手机的核心组件。现在新的智能手机配备1GHz以上的双核CPU、512MB RAM内存和32GB存储器。在应用开发过程中,用户界面和软件开发工具(SDK)让开发人员轻松地调用应用程序接口,访问图形、无线通信功能、数据库和MEMS传感器原始数据,无需知道这些代码背后的详细原理。
•高灵敏度GPS接收器或A-GPS或DGPS:当捕获到有效的卫星信号时,这些模块用于确定用户当前的经纬度位置。多年来人们一直在研究提高GPS接收机在室内和高楼林立的地区的接收灵敏度和定位精度,因为在这类地区卫星信号变弱,并发生多信道干扰错误。
•无线数据传输接口,包括GSM/GPRS、WiFi、蓝牙和RFID:无线数据接口的主要目的是接入互联网,检索当前位置目标的在线数据库,在等待GPS定位或没有GPS信号时提供简要的定位信息。如果建筑物内预装了发射器,其它的近距离无线连接如WLAN、蓝牙和RFID也可以提供精度适当的室内定位信息。
•本机或在线数据库:用于把增强的虚拟目标信息叠加到真实世界视频上。当目标与当前方位吻合时,系统将能从本机数据库或在线数据库检索目标的信息。然后用户可以点击触摸屏上的超级链接或图标,接收更加详细的方位信息。
•内置数字地图的液晶触摸屏:提供高分辨率的用户界面,显示含有虚拟目标信息的真实世界的视频。有了数字地图,用户可以知道当前位置所在街道名称,无需配戴任何特殊的3D眼镜。
•MEMS传感器(加速度计、磁力计、陀螺仪和压力传感器):这些传感器是自导式组件,随时随地工作。因为低成本、小尺寸、轻量、低功耗、高性能,它们成为行人航位推算应用的首选半导体产品。这些传感器与GPS接收器集成在一起可以在室内外获得方位信息。下面的内容将探讨这些传感器在提高室内导航精度中所扮演的重要角色。
随时随地获取精确且可靠的方位信息,使虚拟目标与真实世界的环境保持一致,是移动增强实境应用面临的主要挑战。
2. 室内方位检测
尽管智能手机内置一个GPS接收器,在户外的定位功能非常不错,在数字地图上显示航向,但是,某些GPS接收机在室内或高楼林立的城区无法接收卫星定位信号。即便在户外,当汽车或行人静止时,GPS也无法提供精确的方位或航向信息。GPS无法区分微小的高度变化。此外,GPS仅凭一个天线无法为手机或汽车用户提供姿态信息,例如,俯仰/滚转/航向信息。
差分全球定位系统 (DGPS)能够取得几厘米的定位精度;但是需要另一个GPS接收器做基站,使用某一种距离粗捕获码向移动GPS接收器发射参考位置信息。辅助全球定位系统 (A-GPS)在某种程度上有助于GPS获得室内定位信息,但是,无法在可以接受的间隔内提供精确的定位信息。当手机用户静止时,至少需要三个GPS天线才可能让GPS检测到用户的姿态信息。不过,目前在一个智能手机上安装多个GPS天线还是行不通的。
因此,仅有GPS的智能手机不能为手机用户提供精确的方位和姿态信息。自导式MEMS传感器是协助GPS实现一体化导航系统、提供室内外LBS定位服务的理想选择。
当天线没有被遮挡时,现代的GPS接收器的绝对定位精度是3米到20米,这个参数不会在一段时期后发生漂移。基于MEMS传感器的捷联式惯性导航系统(SINS) 可在很短的时间内提供精确的定位信息,但是,根据运动传感器的性能,这种导航系统在使用一段时间后很快就会发生精度漂移现象。行人航位推算系统(PDR)是一个根据步长和方位计算从室内已知初始位置开始的行走距离的相对导航系统,虽然定位精度不会随时间推移而发生漂移,但是需要在受磁力干扰的环境内保持航向精度,此外,GPS需要对步长进行校准,才能达到可以接受的定位精度。
按照捷联式惯性导航系统(SINS)理论,根据内在的偏差漂移和比例因数,惯性传感器(3轴加速度计和3轴陀螺仪)可分为三大类:导航级、战术级和商用级。通过下面的两个方程式[1],可以计算出独立的加速度计和陀螺仪的水平位置误差。
加速度计的位置误差:

(1)
其中:
ACC_bias … 加速度计长期偏差稳定性,单位:mg;g = 9.81m/s2
T … 双重积分周期,单位:秒
PE_ACC … ACC_bias造成的位置误差;单位:米。
陀螺仪的位置误差:

(2)
其中:
g … 地球重力,9.81m/s2
GYRO_bias … 陀螺仪长期偏差稳定性,单位:rad/s
T … 双重积分周期,单位:秒
PE_ACC … GYRO_bias造成的位置误差;单位:米。
以上两个方程式可用于计算典型惯性传感器的性能和长期偏差稳定性引起的水平位置误差。当惯性传感器与GPS集成在一起时,这些误差不会随时间推移而扩大,其它引起位置误差的因素,如失匹、非线性和温度影响,也应在计算中给予考虑。
最近在MEMS制程上取得的进步让 MEMS加速度计和陀螺仪能够连续地提供更高的定位性能,使商用级的产品更加接近战术级产品的性能。在较短的时间如1分钟内,独立的加速度计和陀螺仪可取得相对较高的测量精度。当GPS信号受阻时,这对于GPS/SINS一体化导航系统很有用。
对于消费电子产品,室内行人航位推算系统5%的行进距离误差通常是可以接受的。例如,当一个人走过100米的距离时,定位误差应该在5米范围内。这要求航向误差在 ±2°到±5°之间[2]。例如,如果航位误差是2°,当一个人走过100米的距离时,定位误差应该在3.5米范围内 [= 2*100m*sin(2°/2)]。
此外,MEMS压力传感器能够测量相对于海平面的绝对气压。因此,MEMS传感器可以确定手机用户在海平面以下 600米到海平面以上 9000米之间的高度,辅助GPS的高度测量[2]。图3所示是利用MEMS传感器与GPS接收器的行人航位推算系统结构图。
图 3: 移动设备行人航位推算系统结构图

MEMS传感器整合
传感器整合是一套数字滤波算法,用于修正每个独立传感器的缺陷,然后输出精确的响应快速的动态的(俯仰/滚转/偏航)姿态测量结果。传感器整合的目的是把每个传感器的测量数据作为输入数据,然后应用数字过滤算法对输入数据进行相互修正,最后输出精确的响应快速的动态的姿态测量结果。因此,航向或方位不受环境磁干扰的影响,没有陀螺仪的零偏漂移问题。
能够修正倾斜度的数字罗盘是由一个3轴加速度计和一个3轴磁力计组成,可提供以地球北极为参考的航向信息。但是这个航向信息容易受到环境磁力的干扰。如果安装一个3轴陀螺仪,开发一个9轴传感器整合解决方案,则可以随时随地保持精确的航向信息。
在设计一个使用多个MEMS传感器的系统时,了解下表所列的每个MEMS传感器的优缺点是很重要的。
•加速度计:在静态或慢速运动状态下可用于倾斜度修正型数字罗盘;可用于计步器的检测功能,检测步行人当前的状态是静止还是运动。不过,当系统在3D空间静止时,加速度计无法区分真正的线性加速度与地球重力,而且容易受到震动和振荡的影响。
•陀螺仪:可以连续提供从系统载体坐标到局部地球水平坐标的旋转矩阵,当磁力计受到干扰时,陀螺仪可辅助数字罗盘计算航向数据。长时间的零偏漂移导致无限制的姿态和定位错误。
•磁力计:可计算以地球北极为参考方向的绝对航向,并且可用于校准陀螺仪的灵敏度,但容量受到环境磁场的干扰。
•压力传感器:在室内导航时,压力传感器可告诉你身处哪一楼层,辅助GPS计算高度;当GPS信号变弱时,辅助GPS提高定位精度,但是容易受到气流和天气状况的影响。
基于以上各方面考虑,卡尔曼滤波器是最常用的整合不同的传感器输入信息的数学方法。这种方法权衡不同的传感器的作用,给性能最高的方面最高权数,因此,与基于单一媒介的导航系统相比,卡尔曼滤波器算法的估算结果更精确可靠 [3]。
目前基于四元数的扩展型卡尔曼滤波器(EKF)是一个很受欢迎的传感器整合方案,因为四元数只有4个元素,而旋转矩阵有9个元素,此外,四元数法还避免了旋转矩阵的特殊问题 [3]。
4.结论
随时随地精确定位是增强实境等先进移动应用面临的主要挑战,因为增强实境与行人航位推算(PDR)或定位服务(LBS)的关系密切。鉴于GPS接收器的接收限制,MEMS传感器对室内行人航位推算应用很有吸引力,因为这些传感器大多数已经出现在智能手机内。
要想取得5%的室内行人航位推算定位误差,需要开发MEMS传感器整合算法,以修正每个传感器的缺陷,使这些传感器实现优势互补。随着MEMS传感器的性能不断提高,在不远的将来,与用户无关的SINS/GPS一体化导航系统将会成为智能手机的标准配置。
-
不同类型MEMS传感器的比较 MEMS传感器的工作原理2023-06-13 9965
-
MEMS传感器焊接工艺2022-10-18 39860
-
基于单晶硅传感器的MEMS惯性传感器工作方式2020-07-07 3244
-
解读移动智能设备与传感器不可分割的关系2020-06-15 1513
-
宁波材料所在先进气体传感材料与传感器关键技术方面取得进展2019-01-21 1812
-
MEMS传感器四大应用领域详解2018-11-07 4768
-
MEMS传感器用于各种创新的消费类产品设计2018-10-31 1505
-
解析Android移动设备光电传感器技术2018-04-18 2883
-
半导体传感器和MEMS标准化进展飞速2018-03-31 7905
-
MEMS传感器在先进移动设备中的应用2017-11-30 742
-
汽车电子MEMS传感器的应用2016-12-07 4948
-
MEMS传感器的分类2013-10-11 7410
-
借力传感融合技术 MEMS抢占移动设备商机2012-11-29 673
全部0条评论

快来发表一下你的评论吧 !
