

Simulink自动生成代码现阶段的学习笔记
描述
在车载控制器的软件开发中,simulink的身影几乎随处可见,主要是在控制算法和控制逻辑的实现。平时看同事点点点就生成代码了,看起来很简单,但是实际操作起来确各种磕磕绊绊。
下面记录了一下步骤作为现阶段的学习笔记吧。
一、建立任务
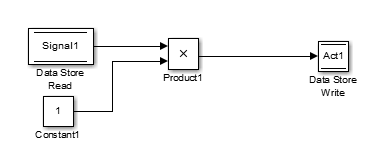
Matlab的版本为R2014。下图是一个简单的模型,其中Signal为模型输入接口变量,Act为模型输出接口变量,每个Task中的内容均一样。
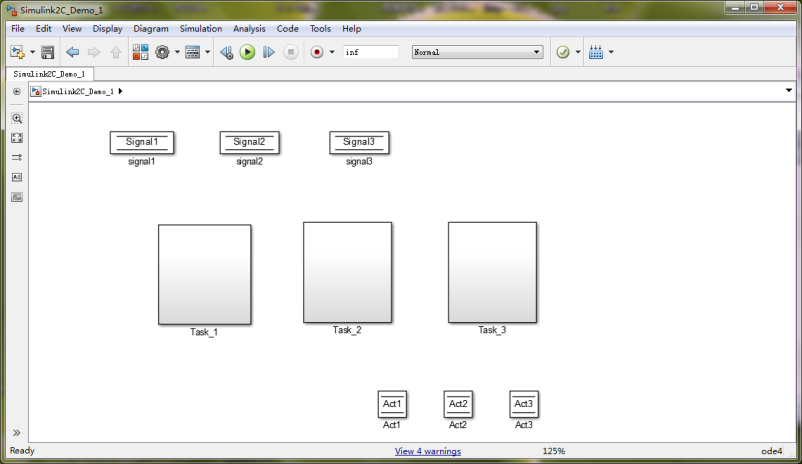
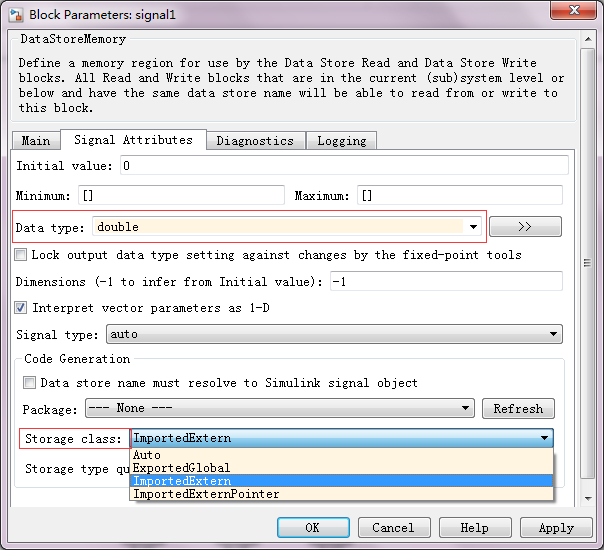
接口配置需要注意其数据类型和Storage Class,两者影响生成代码中的变量的声明。在Storage type qualifier中可以加入其他的限定符。
这里将Signal全部设定为Double类型的Imported Entern类型,将Act全部设定为Exported Global类型。
二、环境配置
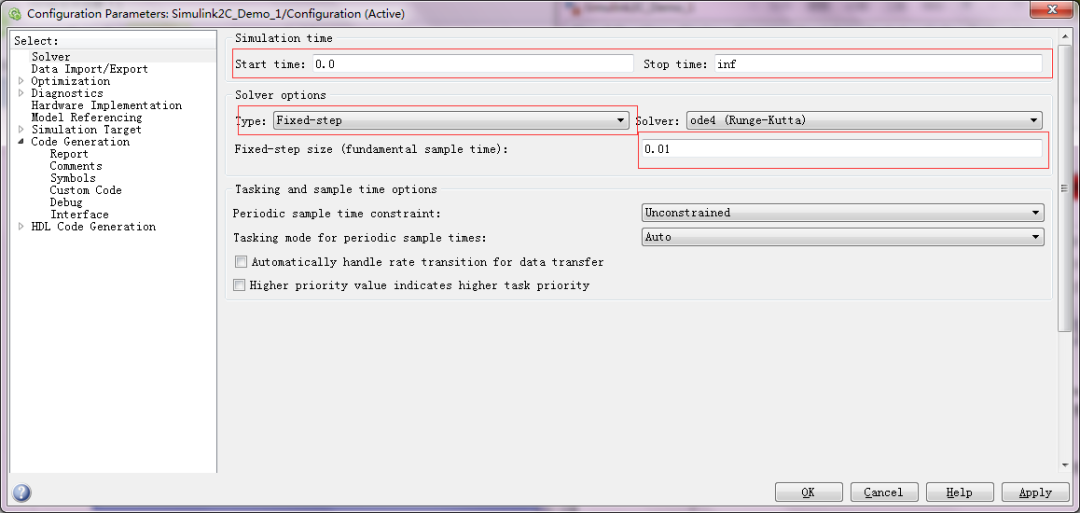
在Simlink模型窗口中选择Simulation | Modele Configuration Parameters命令,弹出如下图所示的参数设置对话框。在左边的目录树中我们关心的项有Solver,Hardware Implementation,Code Generation.
1. Sover 配置
Type选项需要配置成定步长。步长时间和任务调度周期一致。仿真终止时间设置为inf。其他参数为默认。
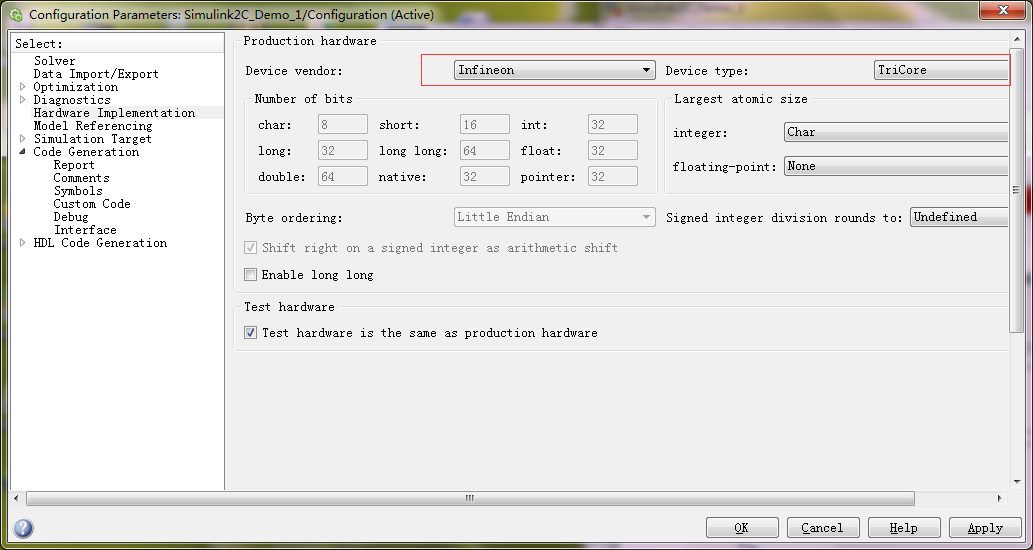
2. Hardware配置
根据自己的开发环境,选择相应的目标板。
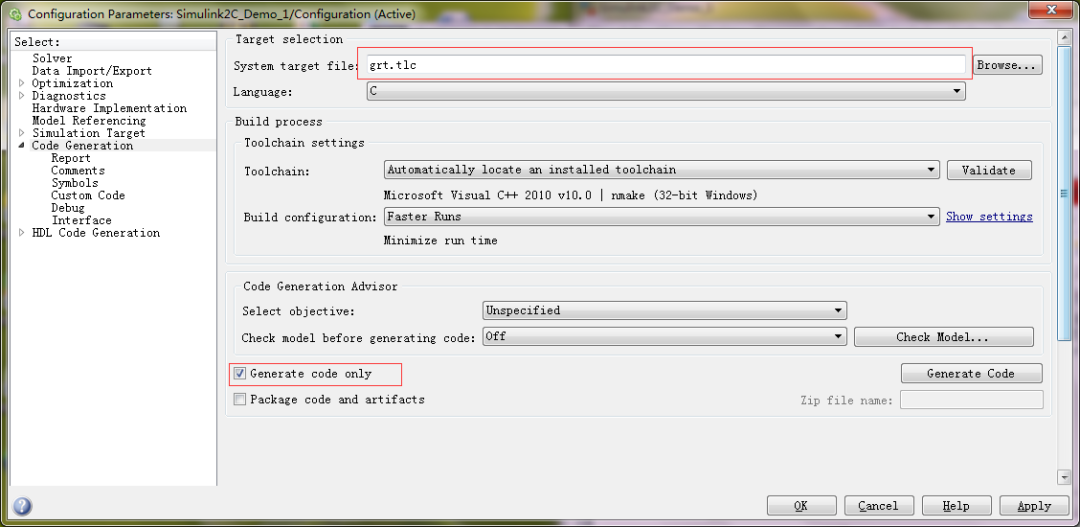
3. Code Generation配置
第一页勾选Generate code only,其它为默认。
在Reprot中勾选生成报告和自动打开报告。
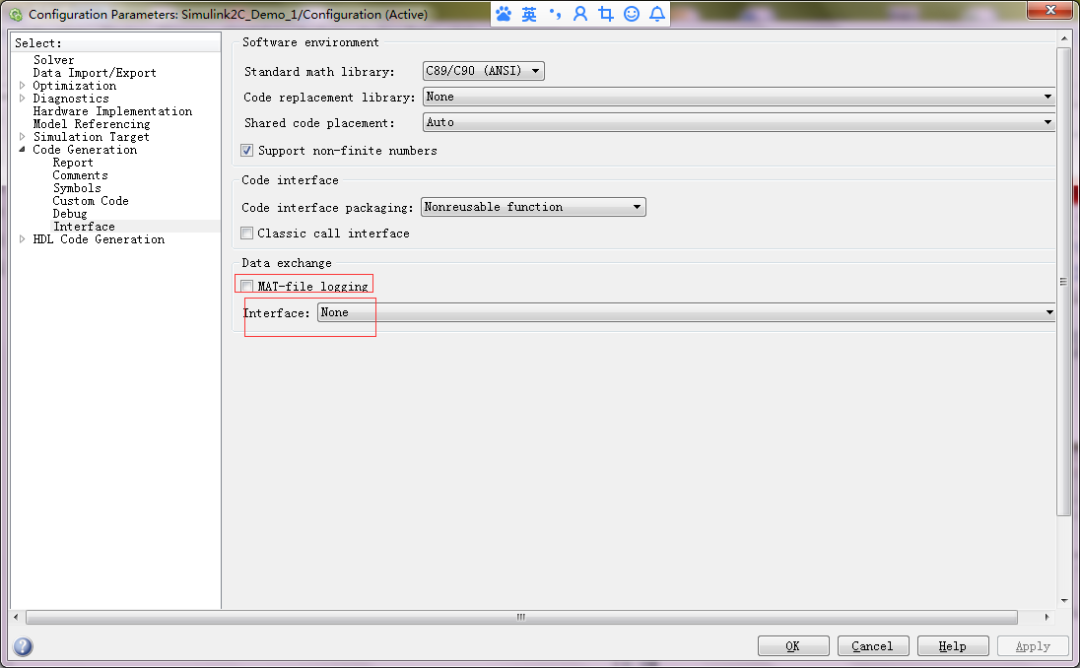
将Interface中data exchange的勾去掉,并将Interface设置为None。配置完毕后点Apply和OK。
三、代码生成
在模型界面Bulid Modle即可自动生成代码。由于我们勾选了报告生成,代码生成完毕后会自动弹出报告。
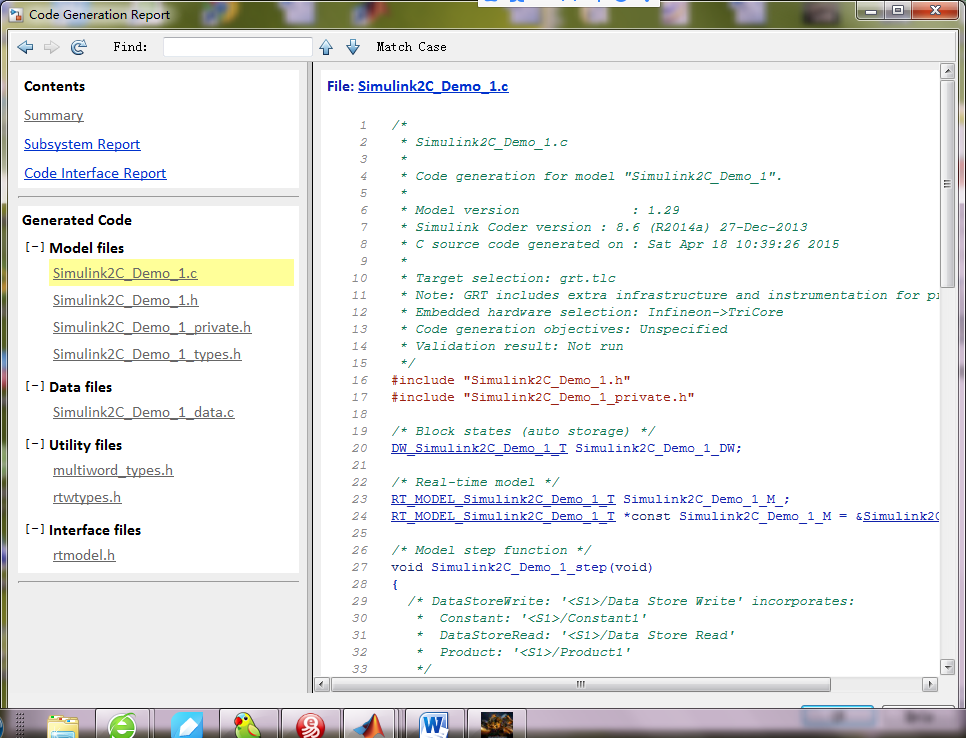
其中ModelFiles和DataFiles中的5个文件就是和我们模型结构紧密相关的文件。其它的也是运行必须的Mabltab数据类型声明文件。一并拷贝到我们的工程环境编译即可。
四、封装成函数及优先级设置
打开Demo_1.h和Demo_1_Pricat.h可以看到我们定义的输出变量和出入变量。
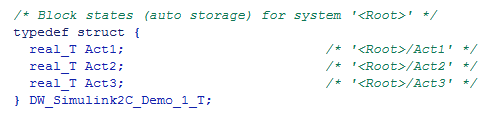

生成代码时除了我们的任务函数外,Matlab自动生成了初始化的和终止函数。

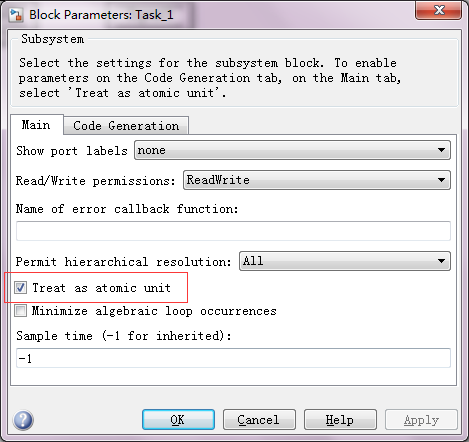
我们在模型中我们定义了三个Task,但如果不另外配置,生成代码时默认只生成一个函数。如果需要打包到独立的函数和文件中,需要做如下配置。
在Task模块上点右键,选择Block Parameters,勾选treat as acomic unit.
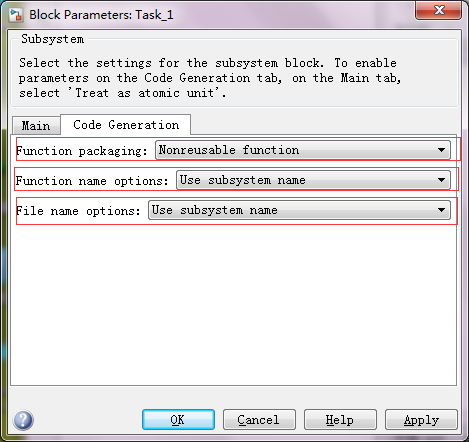
在Code Generation一栏,设置任务的重入属性,函数名,文件名信息。
右键选择Block Properties,在Priority一栏中设置Task优先级ID,该值越小,则任务的执行次序越靠前。
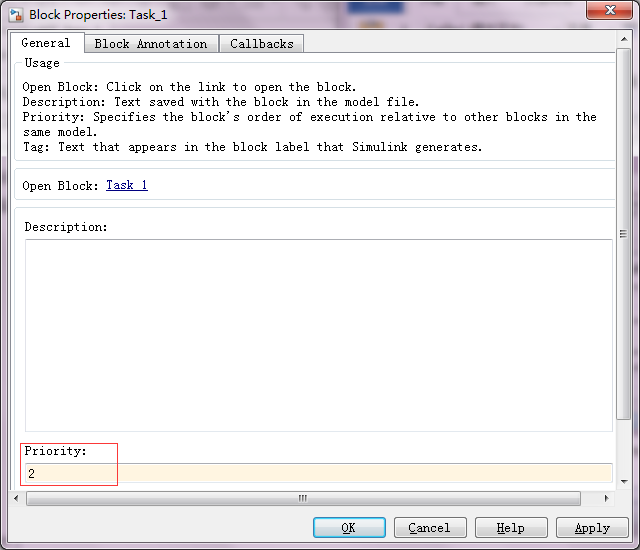
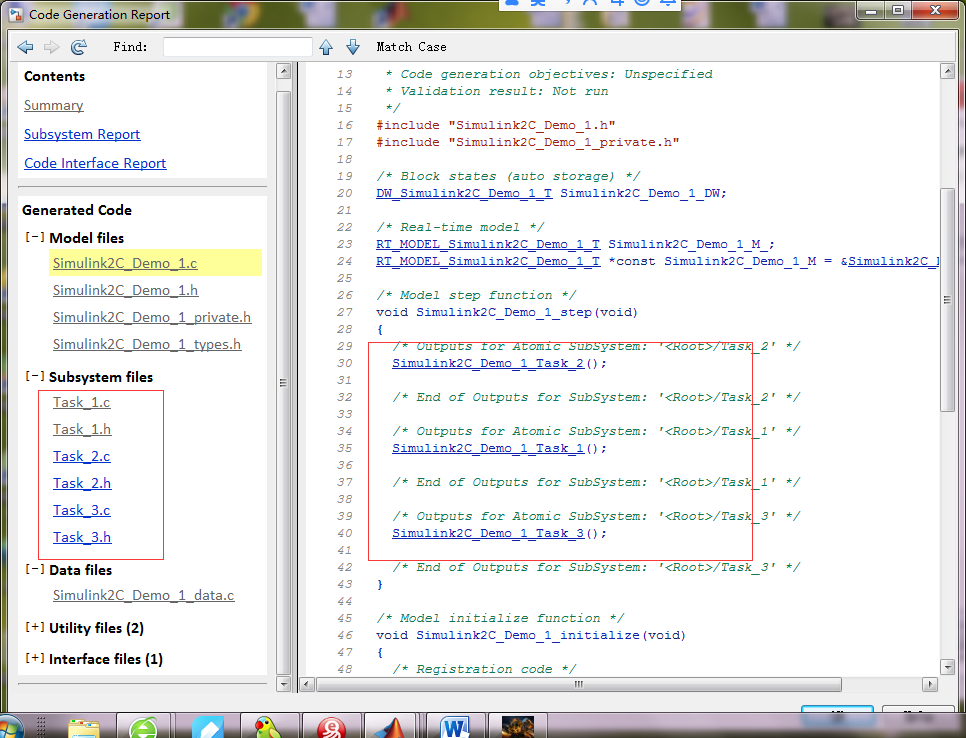
这里我将Task1~3的优先级分别设置为2,1,3。
以下是自动生成代码后的任务顺序。生成了Task的.c和.h文件。任务执行顺序也按照优先级顺序执行。
审核编辑:黄飞
-
使用Simulink自动生成浮点运算HDL代码(Part 1)2025-10-22 274
-
simulink自动生成ROS代码2023-11-15 1963
-
利用Simulink自动生成STM32串口代码2023-10-25 3569
-
MBD的Simulink使用技巧:Simulink代码生成的基本概念(1)2023-07-13 4866
-
Simulink 自动代码生成原理分享2022-05-31 9180
-
如何利用Simulink自动生成可以在STM32单片机运行的代码?2021-11-19 1825
-
Simulink生成嵌入式代码的学习笔记(一)2021-10-20 697
-
用simulink自动生成C代码2021-08-17 1406
-
SIMULINK下的STM32F4的自动代码是如何生成的2021-08-12 1284
-
Simulink模型生成代码2021-08-11 2112
-
视频教程-基于Simulink的FPGA代码自动生成技术-Matlab 精选资料推荐2021-07-20 1030
-
基于模型设计的HDL代码自动生成技术综述2021-06-08 4490
-
MathWorks推出新款代码生成工具Simulink2012-04-26 1679
-
快速原型中SIMULINK模型的代码自动生成2011-04-17 1562
全部0条评论

快来发表一下你的评论吧 !
