

基于GD32H759的嵌入式运动控制高效解决方案
控制/MCU
描述
近年来,由于社会高速发展,对运动控制系统的要求越来越高。传统的基于PC及低端微控制器逐渐满足不了现代制造的工艺要求。随着嵌入式技术的日臻完善,嵌入式运动控制器已经开始在工业自动化市场上占据主导。基于ARM技术的微处理器具有体积小、低成本、低功耗的特点,在工业自动化运动控制领域具有广阔的发展前景。
系统简介
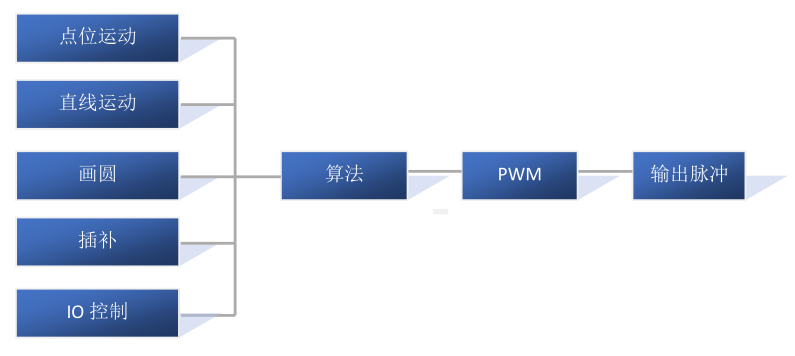
图1 运动控制系统原理
基于GD32H759系列超高性能MCU优秀的数据计算能力,硬件设计方案方案采用ARM+FPGA的架构。本运动控制系统总体设计方案,使用MODBUS-RTU/TCP及本公司自定义“太控”协议设计串口通讯程序,设计了动态表,将HMI的运动控制信息进行存储,利用HMI画面实现人机交互。硬件平台设计如图2所示。
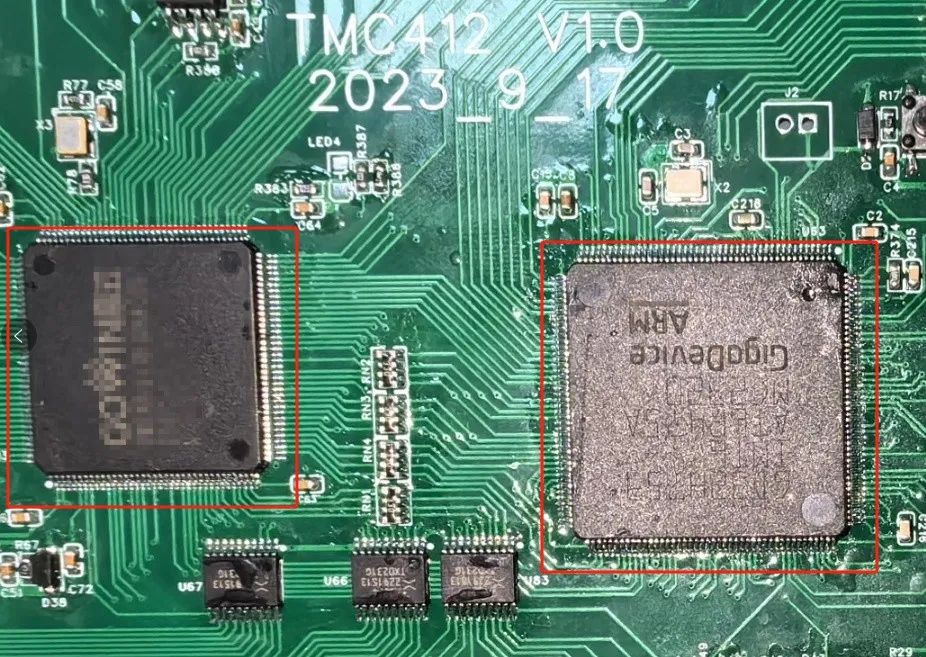
图2 运动控制硬件平台
系统框架
在系统中ARM是主处理器,用来实现系统的触发、系统命令的发送、任务调度、切换等功能。FPGA是接收并解析ARM处理好的数据,并最终根据ARM的命令完成脉冲发送、脉冲计数及运动任务掌控等功能,作为ARM的外设使用。
大多工业自动化的运动控制都需要考虑到系统实时性、数据处理、以及实际应用的需求。ARM+FPGA的硬件设计方案以ARM(GD32H759)为主控制芯片,主要完成电机参数、插补计算、人机交互、加工文件管理等控制。辅助芯片FPGA负责完成各轴脉冲输出、原点检测、输入信号处理等。
控制器关键参数规格列下表所示:
| 参数 | 规格 |
| 功率 | <5W |
| 电压 | 24V DC |
| 轴数 | 12轴 |
| 最大脉冲频率 | 单轴4MHZ |
| 串行通讯端口 | 2路232 1路485 1路RJ45 |
| IO点数 | 24入24出 |
| IO扩展 | 支持 |
ARM+FPGA的架构与ARM+DSP架构比较,各有优势,FPGA的构架能产生多路脉冲驱动波,在多轴配合、多轴运动控制、IO扩展、存储等方面有绝对优势,DSP架构优势在于能实现复杂的数据计算。
在整体设计中,FPGA挂在ARM的地址空间上作为ARM的外设使用。FPGA要完成掌控任务首先要先在ARM中运行包含FPGA所在地址的指令,运行后ARM选中FPGA,FPGA接收到自己被选中的信息后检测地址总线上ARM发送的地址数据,解析完成总线上传输的数据之后开始动作。寄存器也是运动控制最重要的一环,ARM对FPGA的完全控制就是通过提前对FPGA内部的寄存器进行配置。
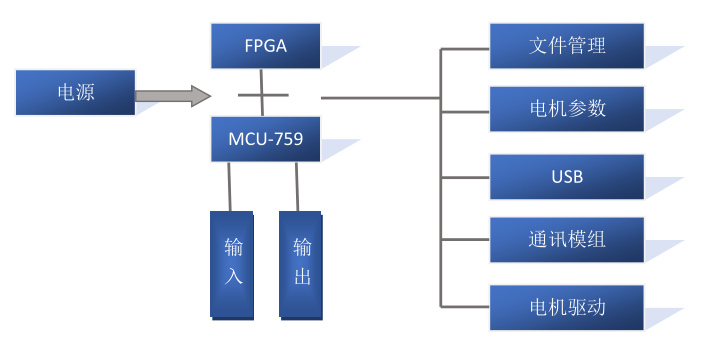
图3 GD32H759 MCU工作平台
方案优势
GD32H759具有超强的计算能力,得益于优秀的GD32H759硬件平台,控制系统采用ARM+FPGA的构架,能实现更多轴的同时运动控制,同等需求下较于ARM+DSP的架构硬件成本更低,产品在市场竞争中优势更大。GD32H759经我们方案验证,在实际运用过程中拥有极强的稳定性、优异的可扩展性。
工业自动化很多客户的需求由原来的一机专用演化为一机多用,这种运动控制器在数据处理、数据存储、IO配置、多轴联动等功能上都要经得过考验,而搭载GD32H759的ARM+FPGA的构架能很好的搭建出适应市场需求的平台。
搭载GD32H759的ARM+FPGA构架控制器平台在脉冲频率上远超原本的平台,在特殊运用环境中可配置能力更高、适用性更广、控制处理更快,能大幅减少加工时间。
审核编辑:黄飞
-
rtthread5.2.0移植到gd32H759无法启动芯片是怎么回事?如何解决?2025-03-03 735
-
rtthread5.2.0移植到gd32H759无法启动芯片怎么解决?2025-09-15 442
-
求AMD R系列与AMD SOC系列嵌入式高效能解决方案2021-05-10 2147
-
基于OMAP平台的嵌入式运动控制器设计资料分享2021-12-24 1843
-
基于Arm®技术的嵌入式控制解决方案分享2022-12-08 566
-
基于ARM芯片的嵌入式运动控制系统设计2009-07-07 547
-
基于嵌入式运动控制器系统的设计与开发2009-07-30 575
-
基于ARM与DSP的嵌入式运动控制器设计详解2018-06-24 8373
-
什么是嵌入式运动控制2022-05-31 3557
-
IAR全面支持GD32H7系列超高性能MCU开发解决方案2023-07-17 3395
-
野火GD32H759开发板产品概述2024-11-13 8293
-
GD32H737/757/759用户手册2025-01-16 1248
-
GD32H759xx数据表2025-01-17 714
-
GD32H737/757/759 MCU规格书2025-02-07 1460
-
Infineon嵌入式系统解决方案:高效、灵活且具成本优势2026-05-19 286
全部0条评论

快来发表一下你的评论吧 !
