

基于轨道电润湿的液滴操控技术,有望用于新一代数字微流控平台
描述
电润湿(electrowetting)现象于1875年由法国物理学家Lippmann提出,作为现有最成熟的液滴电操控方法,已成功应用于数字微流控、传热强化、淡水收集等领域。然而,现有电润湿技术受限于液滴驱动速度慢、电极图案复杂、粘性试剂易污染等问题。
大连理工大学姜东岳团队联合香港理工大学王钻开教授,在超疏水表面电润湿实验中发现了轨道电润湿(Orbital-electrowetting,OEW)现象,这一现象与传统电润湿的跨电极运动不同,其运动模式为沿着电极间隙运动。通过实验、数值模拟和理论分析揭示了这一新现象背后的物理机制,并提出了基于轨道电润湿的高运动速度、电极结构简单、抗污染的液滴操控新方法。相较于传统电润湿液滴操控(CEW),速度得到5倍提高(CEW:~40 mm/s,OEW:~210 mm/s)。此外,OEW液滴操控展现出多功能、高转向性、耐高盐、表面无残留、高稳定性等特点。“轨道”的引入大大降低了电路的复杂性和控制难度,为数字微流控平台腾出了更多空间,因此在实际应用中表现出极大的潜力。该研究以“Orbital Electrowetting-on-Dielectric for Droplet Manipulation on Superhydrophobic Surfaces”为题发表在Advanced Materials期刊上。
图1(a)为OEW的结构示意图,包含基底、氧化铟锡透明电极、SU-8介电层以及超疏水涂层。如图1(b)所示,当施加低频交流电压(<70 Hz,10 μL液滴)时,液滴处于不稳定状态,会发生跨电极运动;而当施加高频交流电压(>70 Hz,10 μL液滴)时,液滴会沿“轨道”高速运动。对于传统电润湿液滴驱动,需要按次序给电极阵列通电,才能实现液滴的连续运动,这需要复杂的电路设计和大量的开关控制。而OEW大量简化了控制电路和电极数量,这为基于电润湿的数字微流控技术开辟了新的思路。
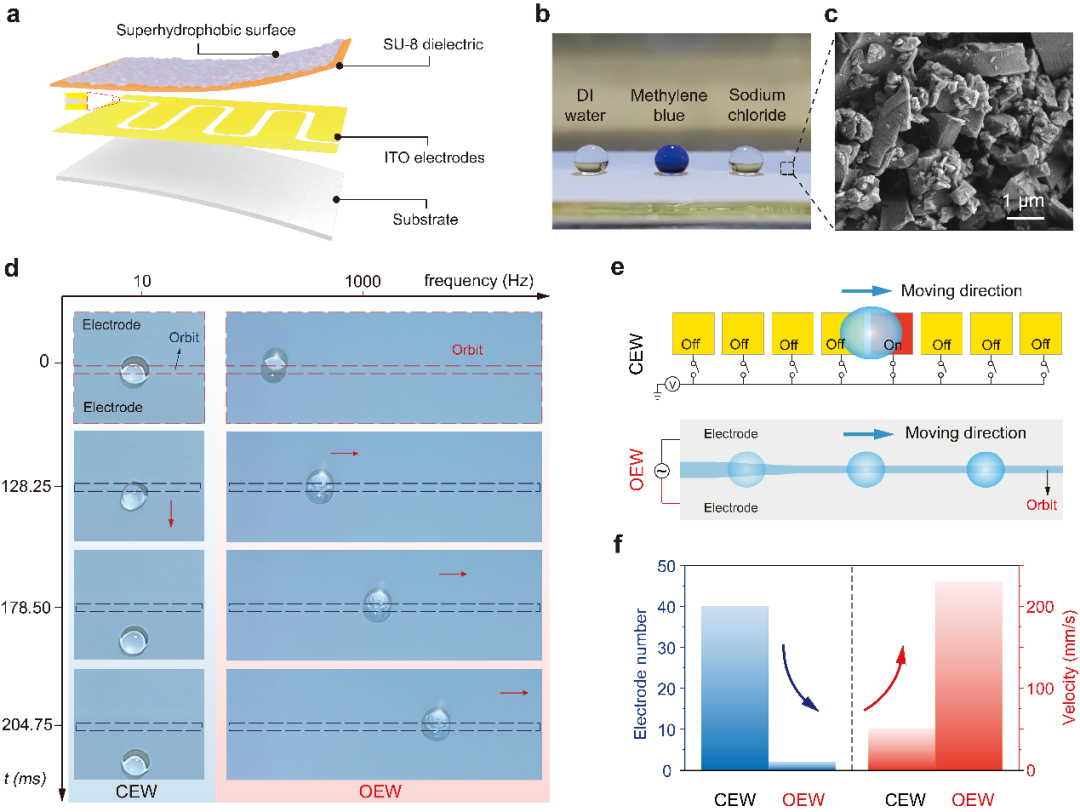
图1 OEW的结构和液滴输运
该项工作实现了超疏水表面的可逆电润湿,即断开电压后,液滴的接触角能恢复到施加电压前的大小。表面的低粘附是实现电润湿液滴驱动的前提,否则会因为“钉扎效应”的发生而导致失败。如图2所示,这项工作实现了液滴爬升,且即使10%质量浓度的盐水,其驱动速度也能维持在~210 mm/s以上。此外,在对表面进行5000次液滴撞击,72小时的水下浸泡后,表面仍然能够有很好的超疏水性能(水接触角>154°),在进行连续超过1000次液滴输运后,仍然能保持良好的性能,稳定运行。
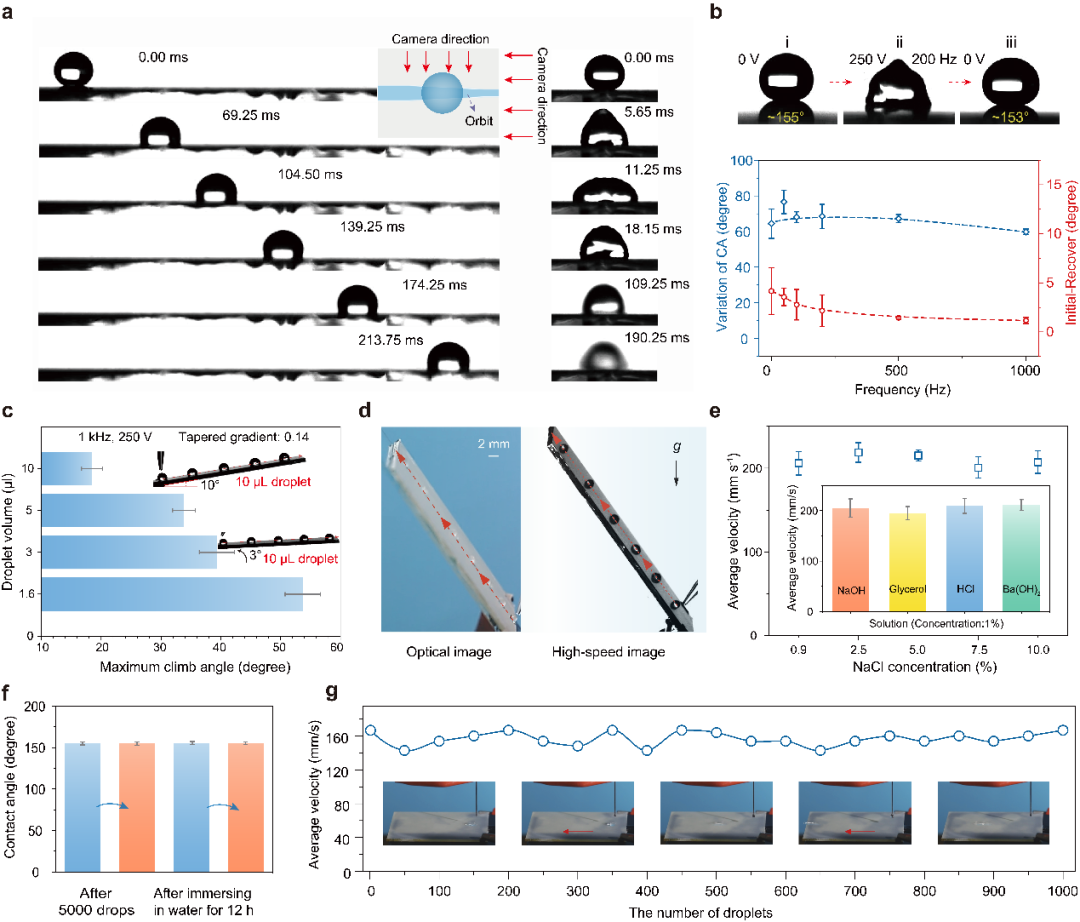
图2 OEW液滴操控和表征
文中进一步讨论了实现OEW液滴操控的条件,绘制了如图3所示的相图。对于一个确定的表面,通过改变电极的梯度,调节电润湿数的大小,可以实现对液滴速度的调控。
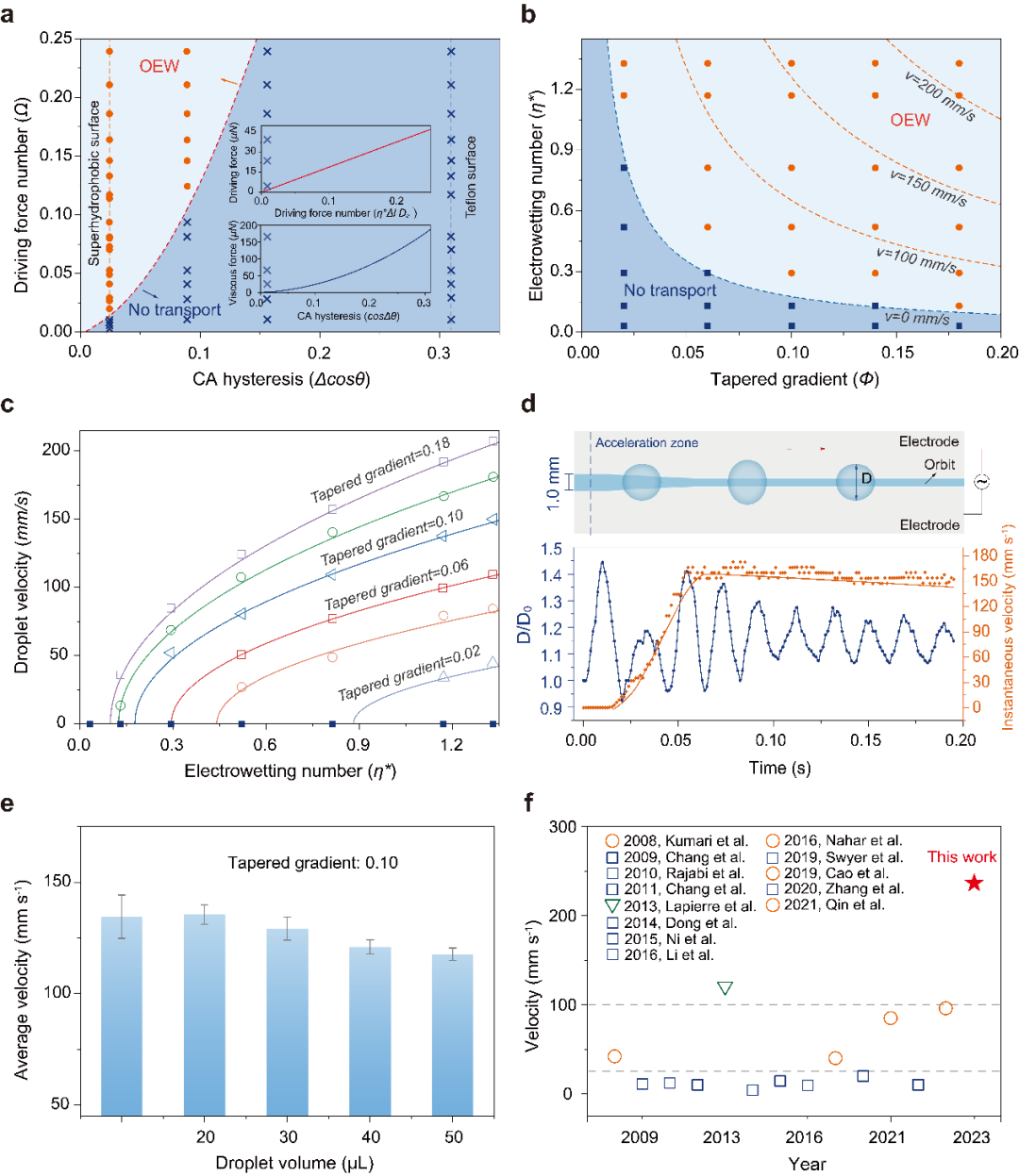
图3 OEW液滴操控和性能控制
最后,文中演示了基于OEW的各项应用。通过对轨道的设计,可以实现液滴的连续拐弯(10个连续90°弯道),如视频1所示。此外,液滴的混合、输运、停止后再启动均能很好的稳定实现,也能在表面上进行一些简单的化学反应。
综上所述,研究人员提出了一种新的基于电润湿的液滴操控方案,仅需要一对电极,就能实现液滴的高速远距离输运;这突破了传统电润湿驱动需要大量电极和控制电路的技术瓶颈。该技术有望为新一代的数字微流控平台搭建提供新的思路。
论文链接:
https://doi.org/10.1002/adma.202314346
审核编辑:刘清
-
微流控液滴芯片:应用于基础的材料筛选和材料筛选2018-01-10 5868
-
基于数字微流控与表面增强拉曼的超灵敏自动化免疫检测的新仪器新方法2018-04-17 6059
-
数字微流控技术的基本工作原理2019-03-12 13727
-
主动式数字微流控芯片的研究步入了崭新的阶段2021-01-11 5663
-
天马有源数字微流控芯片实现多类相关传感功能集成2022-06-20 3172
-
液滴微流控技术的发展与挑战2022-07-12 3391
-
MSPI新应用如何实现液滴操控2023-05-15 1914
-
用于高通量单液滴的操纵和生成的有源矩阵数字微流控芯片2023-08-14 4108
-
微流控芯片在生物学有何应用?微流控芯片微液滴、检测技术介绍2024-08-14 1983
-
ATA-2161高压放大器与微流控芯片液滴分选:精准操控与高效应用2025-09-16 665
全部0条评论

快来发表一下你的评论吧 !
