

传感器融合如何使 AMR 在工厂车间内高效移动
描述
作者:Jeff Shepard
随着人与自主移动机器人 (AMR),也称为工业移动机器人 (IMR) 在同一区域工作的情况越来越多,多种固有安全风险亟待解决。AMR 的安全高效运行非常重要,不能只依赖单一传感器技术。
多传感器融合,或简称“传感器融合”,将激光测距 (LIDAR)、摄像头、超声波传感器、激光障碍物传感器和射频识别 (RFID) 等技术结合起来,为一系列 AMR 功能提供支持,这些功能包括导航、路径规划、防撞、库存管理和物流支持。传感器融合还包括提醒附近的人注意 AMR 的存在。
为了满足 AMR 安全高效运行的需求,美国国家标准协会 (ANSI) 和自动化推进协会 (A3)(前身为机器人工业协会 [RIA])正在制定 ANSI/A3 R15.08 系列标准。R15.08-1 和 R15.08-2 已经发布,重点关注基本安全要求和 AMR 与现场的集成。R15.08-3 目前正在制定中,该标准将扩展 AMR 的安全要求,其中包括使用传感器融合技术的更详细建议。
为了迎接 R15.08-3 标准的到来,本文回顾了当今与 AMR 安全和传感器融合相关的一些最佳实践,首先简要介绍了目前与使用 AMR 有关的功能安全要求,其中包括 IEC 61508、ISO 13849 和 IEC 62061 等通用工业安全标准,以及 IEC 61496 和 IEC 62998 等与感测人体存在有关的安全要求。然后介绍了典型的 AMR 设计,详细说明了各种传感器技术,展示了具有代表性的设备,并探讨了这些设备如何为导航、路径规划、定位、防撞和库存管理/物流支持等功能提供支持。
精益求精
AMR 设计人员需要考虑一系列安全标准,首先是 IEC 61508、ISO 13849 和 IEC 62061 等通用功能安全标准。此外,还要考虑与感测人体存在有关的特定安全标准,如 IEC 61496、IEC 62998 和 ANSI/A3 R15.08 系列标准。
IEC 61496 为多种传感器类型提供了指导。该标准参考了 IEC 62061 和 ISO 13849,IEC 62061 规定了机器电敏保护设备 (ESPE) 的设计、集成和验证要求,并提出了建议,其中包括安全完整性等级 (SIL);ISO 13849 涵盖了与机械安全和控制系统的安全相关部件有关的要求,其中包括安全性能等级 (PL)(表 1)。
| | 要求 | 类型 |
| ------------------------------------------ | ---------------- |
| 1 | 2 | 3 | 4 |
| 安全性能符合 IEC 62061 和/或 ISO 13849-1 | 不适用 | SIL 1 和/或 PL c | SIL 2 和/或 PL d | SIL 3 和/或 PL e |
| SIL = 安全完整性等级;PL = 性能等级 |
表 1:IEC 61496 中规定的各类 ESPE 的安全要求。(表格来源:[Analog Devices])
IEC 62998 较新,通常是更好的选择,因为该标准包括与实施传感器融合、在安全系统中使用人工智能 (AI),以及使用安装在 IEC 61496 覆盖范围之外的移动平台上的传感器有关的指导。
R15.08 第 3 部分发布后,可能会使 R15.08 系列成为最好的选择,因为该系列将为 AMR 系统和 AMR 应用的用户增加安全要求。相关主题可能包括传感器融合和更广泛的 AMR 稳定性测试和验证。
传感器融合功能
对设施进行地图构建是 AMR 调试的一个重要方面。但这并非一劳永逸的活动,而是一个持续过程的一部分,该过程称为即时定位与地图构建 (SLAM),有时也称为同步定位与地图构建。这是一个在跟踪机器人位置的同时针对任何变化不断更新区域地图的过程。
为了支持 SLAM 并实现 AMR 的安全运行,就需要传感器融合。并非所有传感器在所有工作环境下都能发挥同样的作用,不同的传感器技术会产生不同的数据类型。在传感器融合系统中,AI 可用于整合与当地工作环境有关的信息(是雾霾还是烟雾、湿度、环境光亮度等),还可以通过整合不同传感器技术的输出,获得更有意义的结果。
传感器元件可按功能和技术分类。AMR 中传感器融合功能的示例包括(图 1):
- 距离传感器,如车轮上的编码器,以及使用陀螺仪和加速计的惯性测量装置,借助这些装置可测量运动和确定基准位置之间的距离。
- 三维 (3D) 摄像头和 3D LiDAR 等图像传感器,用于识别和跟踪附近物体。
- 通信链路、计算处理器和物流传感器,如条码扫描器和射频识别 (RFID) 设备,这些设备可将 AMR 与整个设施的管理系统连接起来,并将外部传感器的信息整合到 AMR 的传感器融合系统中,以提高性能。
- 激光扫描仪和二维 (2D) LiDAR 等接近传感器,用于检测和跟踪 AMR 附近的物体,包括人的运动。
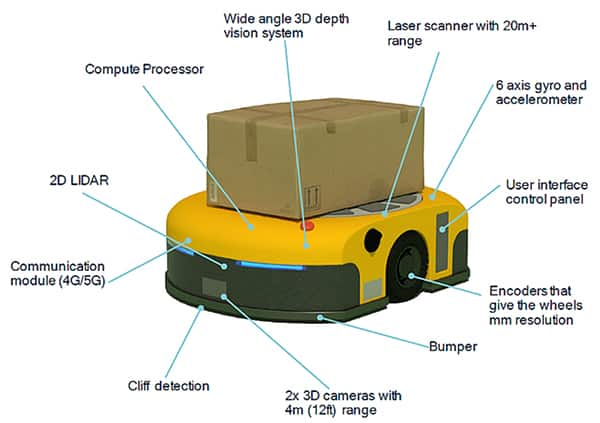 图 1:AMR 传感器融合设计中使用的常见传感器类型和相关系统元件的示例。(图片来源:[Qualcomm])
图 1:AMR 传感器融合设计中使用的常见传感器类型和相关系统元件的示例。(图片来源:[Qualcomm])
2D LiDAR、3D LiDAR 和超声波
2D 和 3D LiDAR 以及超声波是为 SLAM 和 AMR 安全提供支持的常见传感器技术。这些技术之间的差异使得传感器可以相互弥补不足,从而提高性能和可靠性。
2D LiDAR 使用单个激光照射平面,根据 X 和 Y 坐标识别物体。3D LiDAR 使用多个激光束创建周围环境高度详细的 3D 表示,称为点云。这两种类型的 LiDAR 不太容易受环境光条件的影响,但要求待检测物体对激光器发射波长的反射率达到最低阈值。一般而言,在检测低反射率物体方面,3D LiDAR 比 2D LiDAR 更加可靠。
[Seeed Technology]的 [HPS-3D160] 3D LiDAR 传感器集成了高功率 850 nm 红外垂直腔面发射激光器 (VCSEL) 发射器和高感光 CMOS。嵌入式高性能处理器包括滤波和补偿算法,支持多个 LiDAR 同步工作。该装置的检测距离可达 12 米,精度为厘米级。
需要 2D LiDAR 解决方案时,设计人员可以使用 [SICK] 的 TIM781S-2174104。该器件的孔径角为 270 度,角度分辨率为 0.33 度,扫描频率为 15 Hz。安全工作范围为 5 米。
超声波传感器可准确检测玻璃和吸光材料等透射物体,而 LiDAR 往往无法检测到这些物体。超声波传感器也不易受多尘、烟雾、潮湿和其他可能对 LiDAR 产生干扰的条件的影响。但是,超声波传感器对环境噪声的干扰很敏感,其检测范围可能比 LiDAR 更有限。
[Senix]的 [TSPC-30S1-232]等超声波传感器可与 LiDAR 和其他传感器互补,实现 AMR SLAM 和安全性。该器件的最佳检测范围为 3 米,而上文所述的 2D LiDAR 为 5 米,3D LiDAR 为 12 米。这款温度补偿超声波传感器采用环境密封式不锈钢外壳,防护等级为 IP68。
传感器融合通常是指使用多种分立式传感器。但在某些情况下,多个传感器会共同封装成一个装置。
三合一传感器
利用一对摄像头生成立体图像的视觉感知系统,再加上基于 AI 和 ML 的图像处理技术,使得 AMR 能够看到背景并识别附近物体。集立体深度摄像头、独立彩色摄像头和 IMU 于一体的传感器现已问世。
立体深度摄像头(如 [Intel] RealSense [D455 RealSense深度摄像头])使用两个通过已知基线分隔的摄像头,用于检测深度和计算与物体的距离。实现高精度的关键之一是使用稳固的钢制框架,以确保摄像头之间的间隔距离精确,即使在苛刻的工业环境中也是如此。深度感知算法的准确性取决于是否知道两个摄像头之间的精确间距。
例如,型号为 [82635DSD455MP] 的深度摄像头已针对 AMR 和类似平台进行了优化,同时还将摄像头之间的距离延长至 95 mm。这使得深度计算算法能够将 4 米范围的估计误差降低到 2% 以下。
D455 深度摄像头还包括一个独立彩色 (RGB) 摄像头。RGB 摄像头上的全局快门的帧率可达每秒 90 帧,与深度成像仪的视场 (FOV) 相匹配,从而提高彩色图像与深度图像之间的对应性,并增强了解周围环境的能力。D455 深度摄像头集成了一个具有六个自由度的 IMU,使得深度计算算法能够包含 AMR 的运动速率,并得出动态深度感知估计值。
灯光和发声
为 AMR 附近的人提供闪烁灯光和声音警报对 AMR 安全非常重要。这些灯通常以灯塔或灯带的形式出现在 AMR 的侧面。它们可以帮助机器人向人们传递其预期动作相关的信息,还能显示电池充电、装载或卸载活动、转到新方向的意图(就像汽车上的转向灯)、紧急状况等状态。
对于灯颜色、闪烁速度或声音警报,没有固定的标准。它们可能因 AMR 制造商而异,通常是为了反映 AMR 所在工作设施中的具体活动而开发。灯带提供内置和未内置声音警报机制两种版本。例如,[Banner Engineering]的型号 [TLF100PDLBGYRAQP]包括一个密封的发声元件,有 14 种音调可供选择并配备音量控件。
物流支持
AMR 是大型企业系统的一环,通常需要与企业资源规划 (ERP)、制造执行系统 (MES) 或仓库管理系统 (WMS) 软件集成。AMR 上的通信模块与条码读取器和 RFID 读取器等传感器相结合,使得 AMR 能够与企业系统紧密融合。
需要条码读取器时,设计人员可以使用 [Omron] 的 [V430-F000W12M-SRP],该仪器可以对标签上的一维和二维条码或直接零件标记 (DPM) 条码进行解码。其包括可变距离自动对焦、广角镜头、120 万像素传感器、内置照明灯和高速处理功能。
[DLP Design]的 [DLP-RFID2]是一款低成本的紧凑型模块,用于读写高频 (HF) RFID 应答器标签。该模块还能一次读取多达 15 个标签的唯一标识符 (UDI),并且可配置为使用内部或外部天线。其工作温度范围为 0°C 至 +70°C,适合在工业 4.0 制造和物流设施中使用。
总结
传感器融合是为 SLAM 和 AMR 安全提供支持的重要工具。预计 R15.08-3 可能会提及传感器融合以及更广泛的 AMR 稳定性测试和验证,本文回顾了在 AMR 中实施传感器融合的一些现行标准和最佳实践。本文是两部分系列文章中的第二篇。[第一部分]回顾了如何安全高效地将 AMR 集成到工业 4.0 设施中以实现最大效益。
审核编辑 黄宇
-
多维科技推出 AMR132x 和 AMR134x AMR 磁开关传感器系列2023-07-21 1452
-
传感器融合为 IoT 带来了智能传感器,所有行业都将获益2017-03-31 5172
-
获得传感器融合设计的捷径2017-04-07 4196
-
传感器融合增强设备性能解析2018-11-07 1630
-
典型的传感器融合软件架构2018-11-08 1375
-
宜科传感器车间的MES系统应用2018-11-09 2672
-
认识AMR磁阻传感器2018-11-12 5520
-
MCU与智能传感器融合的设计方案2019-05-23 6677
-
基于MCU的智能传感器融合设计的示例实现介绍2019-07-12 2037
-
AMR传感器的基本特性、优势是什么2020-05-22 11548
-
AN-1314:AMR 角度传感器2021-03-19 1067
-
倍加福传感器在AMR自主移动机器人的应用2022-08-12 1765
-
多维科技AMR磁开关传感器芯片AMR132x和AMR134x系列介绍2023-07-24 2224
-
AMR角度传感器2023-11-22 543
-
AMR角度传感器校准2024-08-28 765
全部0条评论

快来发表一下你的评论吧 !
