

基于光子-电子集成回路的相干激光雷达引擎设计
描述
芯片级集成是推动光子技术部署的一个关键因素。相干激光测距或调频连续波(FMCW)激光雷达(LiDAR)是一种光电探测技术,具有瞬时速度和距离检测、人眼安全、远距离和抗干扰等优点。然而,相干激光雷达系统的晶圆级集成受到了对激光相干性、频率捷变性和光学放大器的严格要求的挑战。
据麦姆斯咨询报道,瑞士洛桑联邦理工学院(EPFL)和美国普渡大学(Purdue University)的研究人员组成的团队提出了一种光子-电子激光雷达源,由基于微电子的高压任意波形发生器(HV-AWG)、具有PZT压电执行器的基于混合光子回路的可调谐Vernier激光器以及掺铒波导放大器(EDWA)构成。重要的是,所有系统均采用晶圆级制造兼容工艺实现,包括III-V族半导体、氮化硅光子集成回路和130 nm SiGe双极互补金属氧化物半导体(CMOS)技术。
研究人员在10 m距离进行了测距实验,实现了厘米级的精度水平和50 kHz采集速率的。该激光源是一站式方案且无需线性化,并且可以与现有焦平面和光学相控阵(OPA)激光雷达方案无缝集成。相关研究成果近日以“Photonic-electronic integrated circuit-based coherent LiDAR engine”为题发表于Nature Communications期刊上。
光子-电子激光雷达源
光子-电子激光雷达由三个主要组件构成(图1a):激光器、ASIC和片上放大器。通常,分布式反馈(DFB)激光器被用作FMCW激光雷达中的光源。在本研究工作中,研究人员采用了一种基于Vernier环形滤波器的外腔混合集成激光器。该激光器(图1c)的工作波长为1566 nm,包括一个反射式半导体光放大器(RSOA),其边缘耦合到具有基于微谐振器的Vernier滤波器的Si₃N₄光子集成回路。压电锆钛酸铅(PZT)执行器被异质集成在微环顶部,通过应力光学效应进行快速激励,从而实现快速激光频率调谐。为了获得更好的稳定性,整个组件被封装在蝶形14引脚封装内,并放置在Peltier元件上,光被耦合到SMF输出光纤。
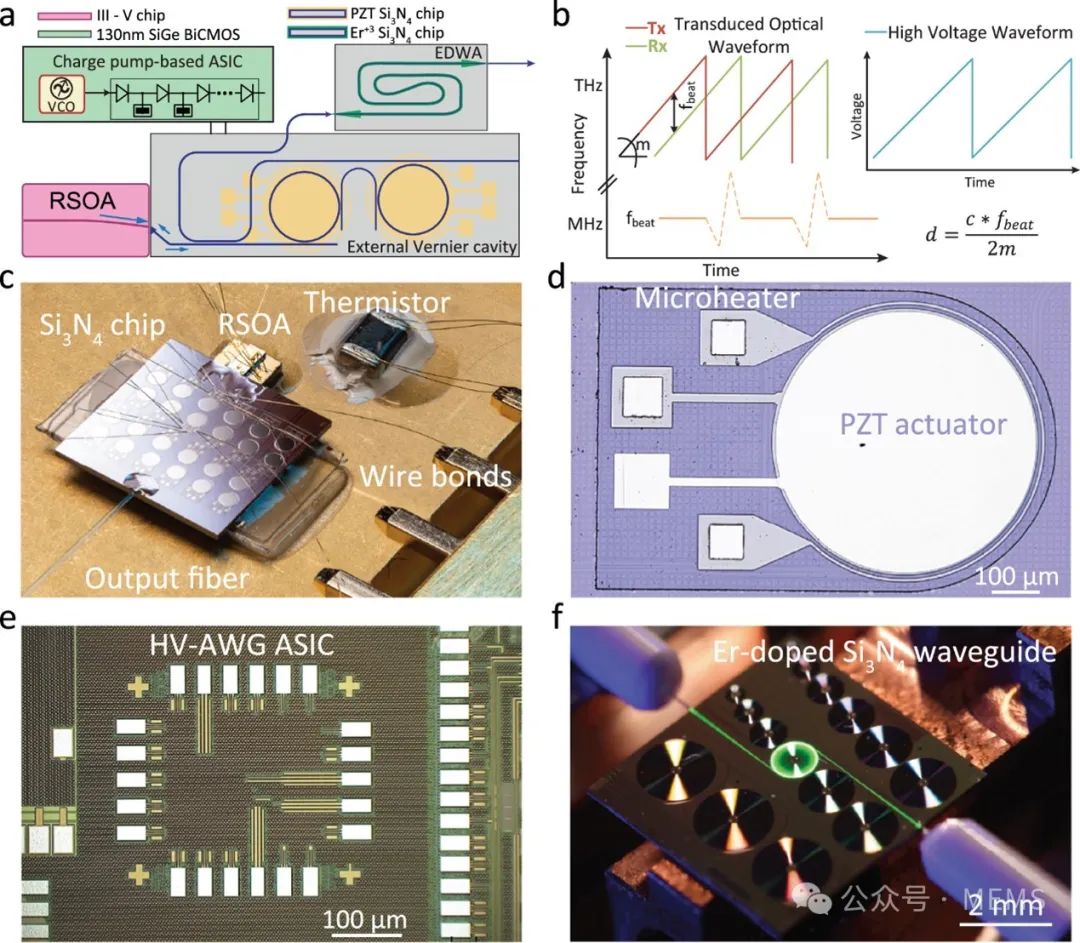
图1 光子-电子激光雷达源的概念
为了使激光器在FMCW模式下运行(图1b),需要对其频率进行GHz的调谐,这对于PZT集成执行器来说需要10 V以上的电压,而传统的CMOS电子器件无法实现这一点。此外,传统的线性调制激光调谐需要反馈以保持波形的线性。为了消除反馈或后处理的必要性,并克服电压的限制,研究人员设计并制造了一种HV-AWG集成电路(图1e),它能产生20 V的锯齿波形以驱动PZT执行器,而供电电压仅为3.3 V。
FMCW激光雷达有多种实现方式。通常,它使用三角啁啾波形,但也可以使用随机相位编码调制。图1b显示了实验中使用的啁啾波形。最后,研究人员采用一个芯片级集成EDWA(图1f)将激光放大至超过20 mW的光功率,以满足鲁棒和远距离相干测距的功率要求。
高压任意波形发生器ASIC
HV-AWG通常以单个甚至多个分立组件的形式提供,由于其与支持先进电子器件的技术不兼容,因此通常难以集成。研究人员展示了一种新颖的架构,它可以使用标准CMOS技术在3.3 V供电电压下生成高压任意波形。图2a显示了该集成电路的原理架构图。该ASIC由一个电压控制的环形振荡器(VCRO)构成,用于驱动一系列Dickson电荷泵级的时钟。
图2b说明了波形生成的原理。当电路在不同的VCRO输入序列下工作时,可产生不同形状、振幅、频率和偏移值的波形,如图2c所示。图2d显示了FMCW激光雷达测距实验中使用的45 kHz锯齿波形。
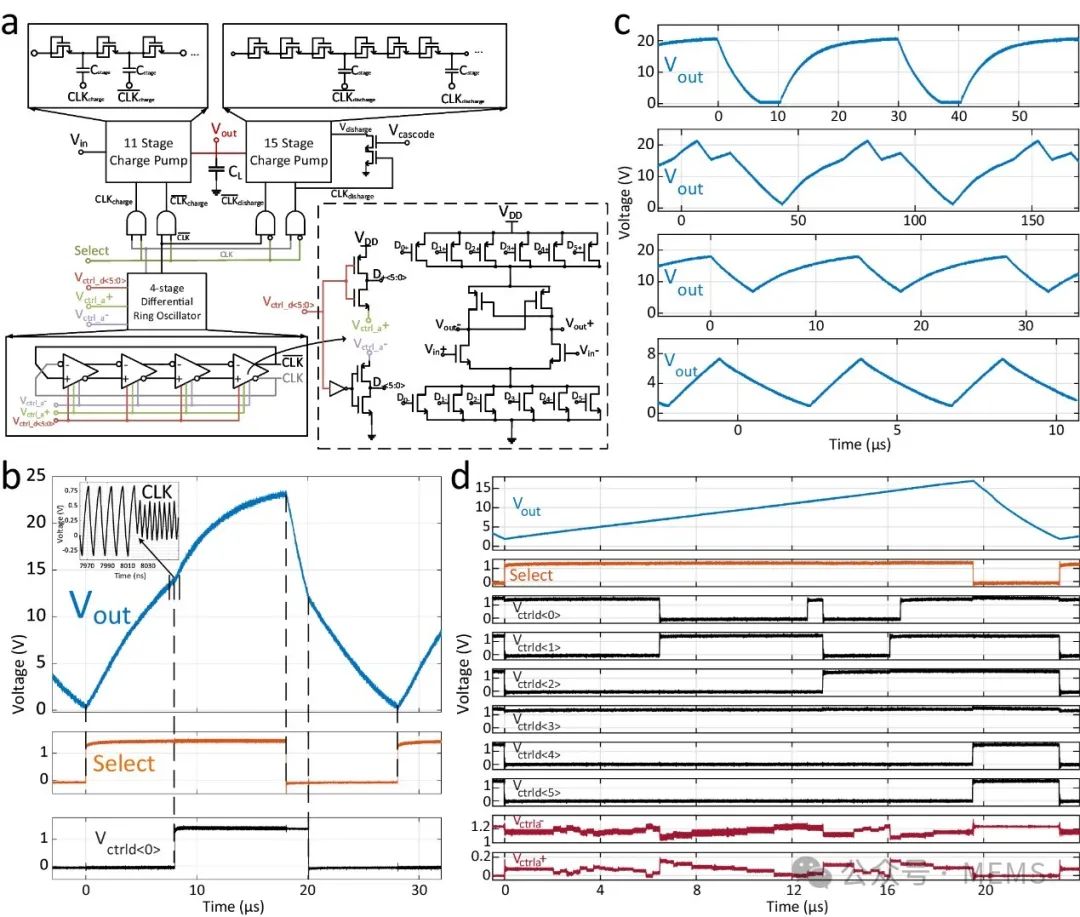
图2 采用130nm SiGe-BiCMOS技术制造的高压任意波形发生器集成电路
电光转换和线性度
图3a显示了ASIC产生的电波形。相同的锯齿信号被施加到Vernier激光器的两个压电执行器上。使用辅助激光器进行的外差测量显示了激光啁啾的时频图(图3b)。
为了实现长距离、鲁棒的测量,FMCW激光雷达要求光波形具有较高的啁啾线性度。为了获得所需的任意波形发射器信号,研究人员采用延迟零差检测法对光波形进行了迭代线性化处理。通过对拍频电信号的希尔伯特变换(Hilbert transformation),研究人员计算出了啁啾的瞬时频率(图3e),从中推断出的激光啁啾的非线性度如图3f所示。
延迟零差检测的傅里叶变换如图3g所示。拍频的半峰全宽(FWHM)决定了激光雷达的分辨率。拍频线宽几乎受到傅里叶变换的限制,宽度为60 kHz。图3h显示了2 × 10⁴次测量的统计数据。从中可以推断,激光雷达最可能的分辨率值为11.5 cm,而固有分辨率为9.3 cm,对应于1.61 GHz(1.78 GHz的90%)。
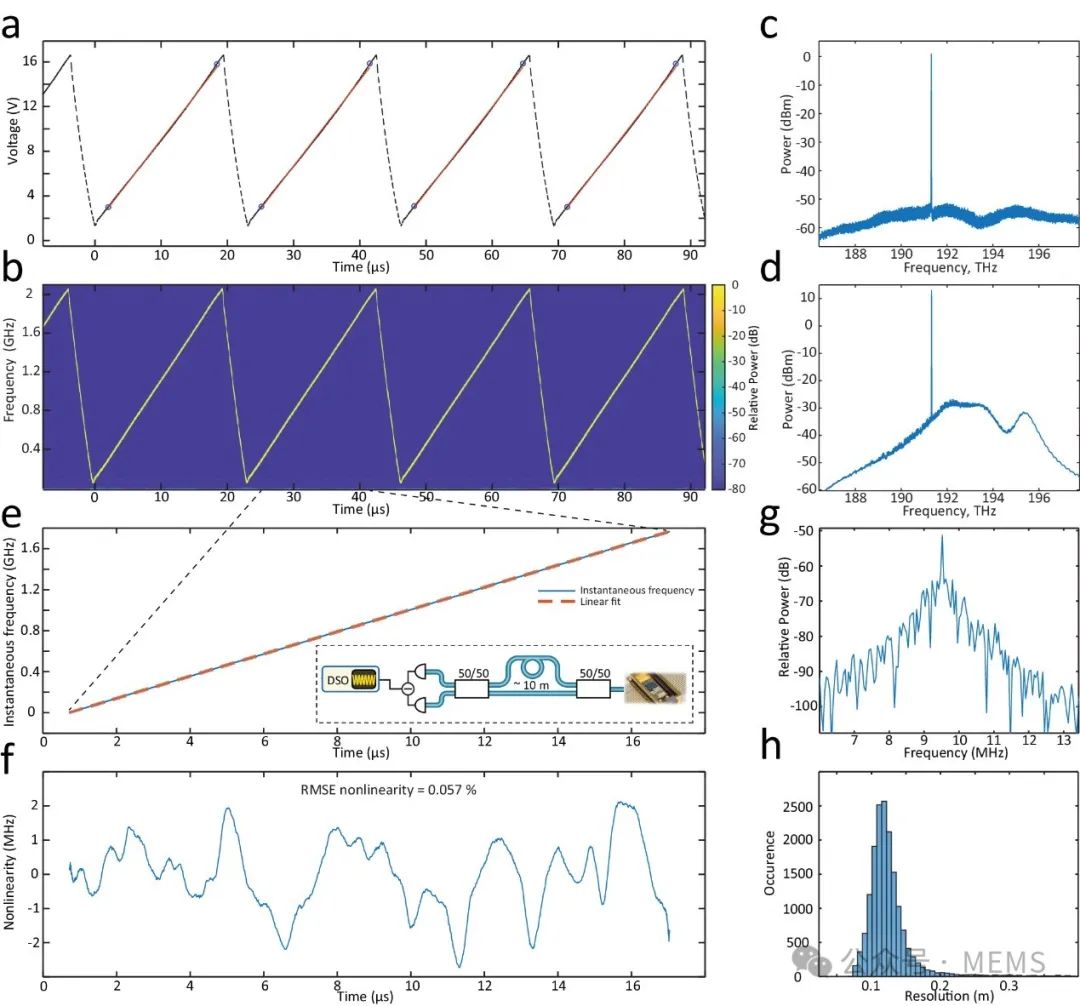
图3 光子集成激光雷达源的电光转换和线性度
光学测距
图4a显示了FMCW光子-电子激光雷达实验设置。图4b显示了由约10,000个像素组成的点云。测量目标由聚苯乙烯泡沫塑料甜甜圈和圆锥体、C和S纸质字母以及放置在距准直器10 m处的平面背景组成。每个像素都是通过分析23 μs的单锯齿波周期获得的。图4c描绘了应用Blackman-Harris窗检测到的信号的周期图。啁啾偏移量是通过使用辅助干涉仪进行自零差测量获得的。研究人员对目标拍频进行高斯拟合以推断测距精度。根据对约2 × 10⁴次实测的单点测量统计数据,研究人员估计该实验设置测距的精度约为1.5 cm。
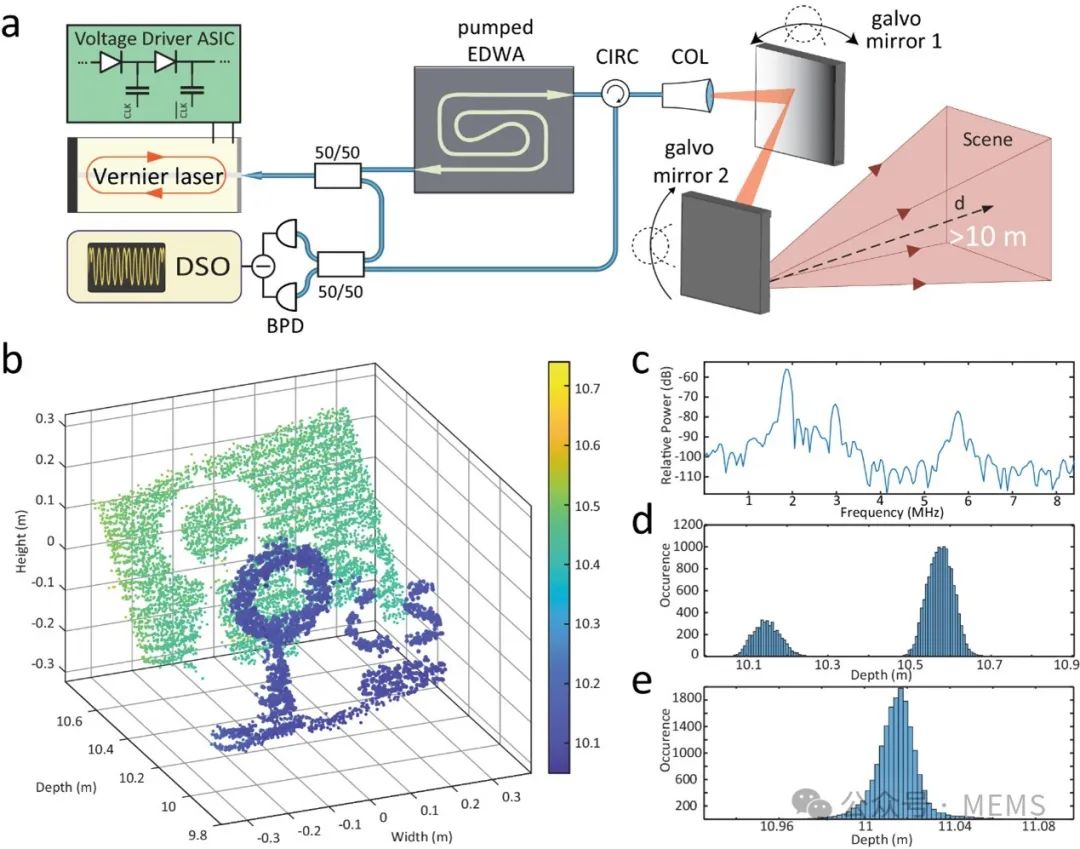
图4 测距实验设置
综上所述,这项研究提出了一种基于光子-电子集成回路的相干激光雷达源。该系统级架构代表了一种具有ASIC定义的FMCW激光调谐功能的嵌入式频率捷变激光器。研究表明,将带有快速PZT执行器的混合集成Vernier环形激光器、高压任意波形发射器ASIC和掺铒波导放大器Si₃N₄芯片组合在一起,可在50 kHz速率下实现2 GHz扫频,输出功率超过20 mW。所提出的激光雷达引擎实现了12 cm的深度测距分辨率,啁啾非线性度小于0.1%。采用传统的2D机械振镜扫描,研究人员在10米的距离上演示了1.5 cm精度的测距。总之,集成激光器、HV-AWG ASIC和芯片级EDWA的组合构成了一个鲁棒的相干激光雷达源,可应用于现有的硅成像3D传感器,并为实现完全集成的相干激光雷达系统奠定了基础。
论文链接:
https://doi.org/10.1038/s41467-024-47478-z
-
频率可调谐光子集成外腔激光器2026-03-16 1086
-
空间激光雷达最小接收光功率的计算2009-05-15 4652
-
激光雷达分类以及应用2017-09-19 8924
-
常见激光雷达种类2017-09-25 14031
-
消费级激光雷达的起航2017-12-07 7516
-
固态设计激光雷达2018-01-25 8540
-
从光电技术角度解析自动驾驶激光雷达2018-09-10 6312
-
TOF激光雷达2019-06-07 9320
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5789
-
激光雷达2021-01-17 20223
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30526
-
光电子集成芯片2022-02-15 1640
-
光子集成芯片是什么2024-03-22 3032
-
光子集成芯片和光子集成技术是什么2024-03-25 2943
-
中科院微电子所在光子集成激光探感技术方面取得进展2024-10-16 1117
全部0条评论

快来发表一下你的评论吧 !
