

机器视觉定位及引导系统的方案
机器视觉
描述
机器视觉定位与引导系统方案是工业自动化领域中的一项关键技术,它结合了机器视觉和机器人技术,以实现精确的定位和引导操作。这些系统广泛应用于制造业,特别是在需要精确抓取、组装、定位和检测的场景中。以下是一些常见的机器视觉定位与引导系统方案:
1. 单相机抓取定位引导:
- 在这种方案中,一个相机被用来捕捉传送带上的物料图像。
- 机器视觉系统分析图像,确定物料的位置和方向。
- 机器人根据视觉系统提供的位置信息进行精确抓取。
2. 单相机纠偏引导:
- 适用于需要对放置或抓取的物料进行位置校正的场景。
- 相机捕捉物料图像,并通过视觉系统分析其偏差。
- 机器人根据分析结果进行调整,以确保物料正确放置或抓取。
3. 上下相机贴合定位引导:
- 这种方案通常用于需要精确对位的场景,如3C产品屏幕和电路板的贴合。
- 上下两个相机分别捕捉不同视角的图像,以提高定位精度。
- 视觉系统分析上下图像,指导机器人进行精确贴合。
4. 手眼标定:
- 手眼标定是机器视觉与机器人结合应用的核心,它解决了相机(眼)与机械手(手)之间的坐标转换关系。
- 通过标定,确保机械手能够根据相机的定位信息精确抓取目标。
5. 多相机系统:
- 在一些复杂的应用场景中,可能需要多个相机来覆盖更大的视野或提供更多的视角。
- 多相机系统可以提供更全面的视觉信息,帮助机器人在三维空间中进行精确操作。
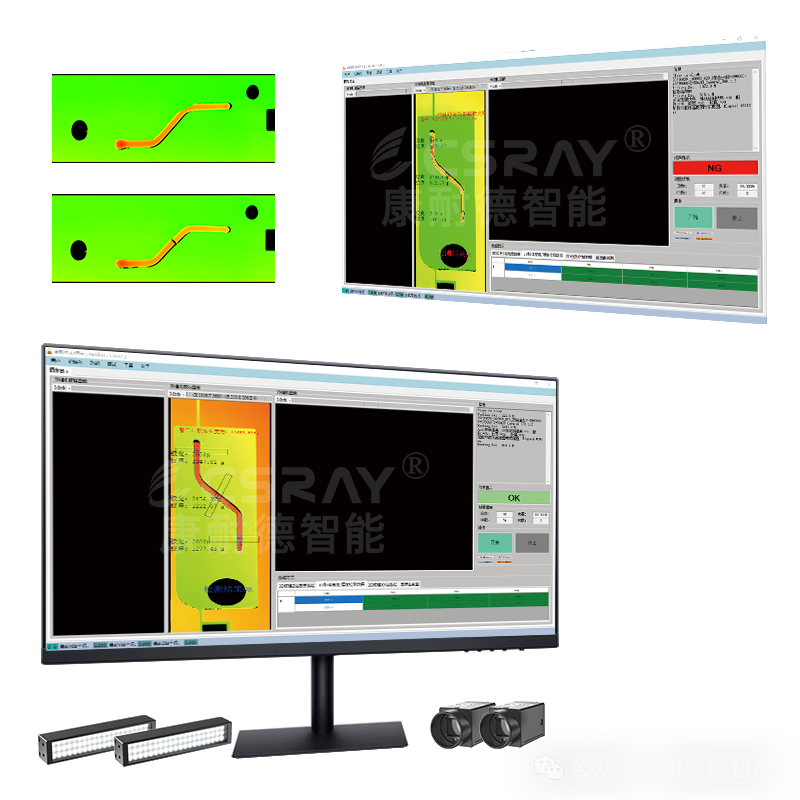
康耐德在点胶领域,也研发了通过视觉定位来实现点胶引导的视觉系统:康耐德_3D引导点胶AOI系统,采用3D激光传感器获得产品的3D点云数据,能够给出每个点位精准的空间坐标信息从而引导点胶设备进行准确的涂胶,同时还可以进行点胶后质量检测,可以提高点胶质量,大大降低成本。
这些方案的实施可以显著提高生产效率、减少人工操作、提升产品质量,并适应快速变化的生产需求。随着技术的进步,机器视觉定位与引导系统将继续发展,提供更多的功能和更高的精度。
审核编辑:黄飞
-
机器视觉系统在注塑行业的应用2014-06-09 2372
-
基于labview机器视觉的图像定位2017-03-31 12404
-
微信精选:图像处理软件在机器视觉系统中怎么工作?2019-09-19 2621
-
深圳机器视觉检测项目包括哪些?2020-11-11 2665
-
四元数数控:深圳机器视觉引导定位是什么?2021-11-24 697
-
四元数数控:深圳CCD机器视觉平刀模切机系统有什么特点?2021-12-10 796
-
四元数数控:深圳CCD机器视觉检测定位系统在激光加工里的应用?2021-12-14 1351
-
四元数数控:深圳机器视觉系统有什么功能?2022-02-16 914
-
机器视觉元件定位的重要性及应用案例2022-11-09 2633
-
工业机器人视觉定位系统应用范围2022-12-20 1612
-
基于点云的视觉引导系统2023-02-09 2060
-
机器视觉检测与机器视觉定位的区别与应用2023-05-30 2250
-
深度视觉系统解决方案|多相机检测|高速视觉检测|视觉引导定位2021-03-09 2830
-
激光焊接视觉定位引导方法2024-05-28 1670
-
安森美机器视觉系统解决方案2024-11-14 1643
全部0条评论

快来发表一下你的评论吧 !
