

超高性价比 ARM Cortex -A53教学实验箱快来提走
描述
基于Samsung S5P6818,ARM Cortex-A53八核处理器,主频1.4GHz,集成Mali-400 MP4图形处理器,支持3D图形流畅运行,支持1080P大尺寸高清视频播放。

实验箱含实验板、7寸触摸屏、7寸全键盘,可选20多种拓展模块。
实验箱支持:音频输入输出接口、摄像头接口、电机接口、ADC、Ethernet、UART、RTC、LCD、HDMI、USB HOST、USB OTG、SPI、IIC、GPIO、SD等外设与接口。适用于嵌入式系统、物联网、无线传感器、人工智能等教学领域。


丨►
实验内容丰富,满足多场景教学需求
创龙教仪提供丰富的教学实验案例,让学生更全面地了解 ARM 人工智能、传感器、物联网相关知识与应用,实验类别如下表:
第一章 | Linux 实验环境搭建与 Linux 开发基础 |
第二章 | Linux 系统移植开发实验 |
第三章 | Linux 驱动开发实验 |
第四章 | Linux应用开发实验 |
第五章 | Linux Qt 形界面开发实验 |
创龙教仪提供保姆式实验操作教程,提供教学实验手册、教学实验视频,在明确重点知识的前提下,指导学生一步步操作,帮助快速打好专业基础。手册内容如下表:
实验目的 | 帮助学生理解实验重点并掌握知识点运用。 |
实验原理 | 包含模块原理图、源码解析、现象原理等,帮助学生理解实验现象的实现方式。 |
实验设备 | 介绍实验所需的硬件设备、软件设备等,让学生提前做好实验准备,节约时间成本。 |
实验步骤 | 详细介绍实验操作步骤,包含源码编译、硬件连接、软件操作等,帮助学生快速上手。 |


向下滑动查看所有内容
这是一条分割线
丨►
案例分享:3-2 PWM 驱动实验
一、实验目的
熟悉基本字符设备的驱动程序设计,掌握在Linux系统下PWM的使用方法并通过应用程序验证蜂鸣器驱动。
二、实验原理
根据原理图,可知使用的是无源蜂鸣器。
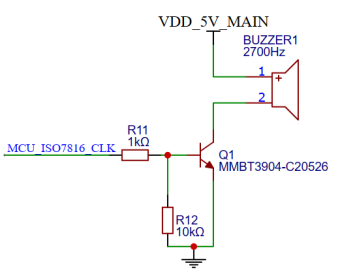
PWM控制
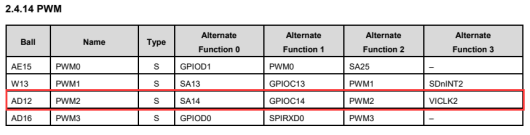
通过输出PWM控制蜂鸣器,MCU_ISO7816_CLK管脚为SA14/GPIOC14/PWM2/VICLK2,可以查看数据册"Datasheet\CPU\Nexell-S5P6818.pdf"查看PWM管脚的相关介绍。
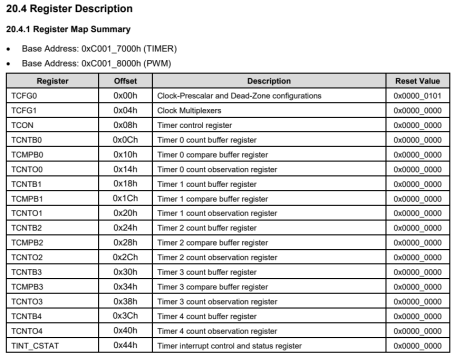
PWM输出脚,默认为低电平,PWM计数器TCNTn的初始值等于TCNTBn,当TCNTn的值递减到等于TCMPBn的值时,PWM输出高电平,当PWM计数器的递减到0时,输出又变为低电平,如此周而复始。
程序框架
1、可以在Ubuntu中查看相关驱动代码。
2、打开驱动代码。蜂鸣器驱动实现为一个字符设备,通过 ioctl 函数来设置相关寄存器的值以此来实现PWM 波形的输出与禁止。
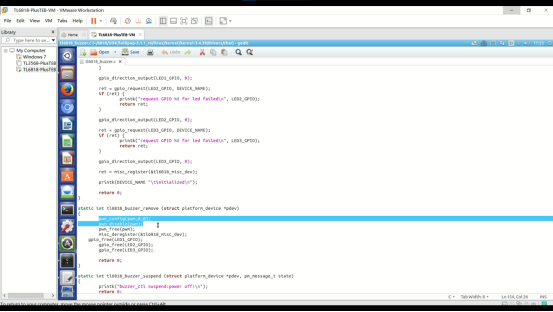
3、首先查看驱动入口函数,在入口函数中申请了PWM。
4、接着为防止驱动加载后直接响起,则使用了pwm_config和pwm_disable,分别是将占空比设置为0和禁用此PWM。
5、当在应用层使用ioctl的时候,会对应到函数操作,这里的pwm_config,第一个参数是设置占空比是以有效时间,第二个参数是设置周期。pwm_enable则为启用此PWM。
三、实验步骤实验设备
本实验中使用的软件为VMware17+Ubuntu 14.04 和串口调试工具Xshell。
本实验中使用的是TL6818-PlusTEB实验箱,所需的配件为Micro SD卡、读卡器、电源、Micro USB、RS232 交叉串口母线和USB 转 RS232 串口线。

编译源码
(1)打开Ubuntu,将Demo文件夹拷贝到6818目录下。
(2)执行指令进入内核文件夹里面,然后输入命令进入内核菜单。
(3)在内核菜单,通过电脑键盘的上下左右按键、Enter键控制进入相应目录。
(4)选择BUZZER驱动,关闭motor驱动。“*”代表选择,通过空格键控制。
(5)然后选择exit,按下enter键不断退出。
(6)退出到最后提示是否保存,选择Yes,按下enter键退出。
(7)然后执行命令返回SDK目录,编译整个SDK。
(8)等待编译完成,生成新的uImage。
文件拷贝
(1)将SD系统启动卡通过读卡器连接到计算机,虚拟机Ubuntu系统会自动识别SD系统启动卡,点击连接到Ubuntu。
(2)进入uImage目录,然后输入命令将uImage更新到卡里面。
(3)在Ubuntu中,执行以下命令,在SD卡内建立一个目录用于放置执行文件,如果已有相应的文件夹,则跳过创建文件夹的步骤。
(4)将测试文件拷贝到SD的目录。
(5) 拷贝完成后,弹出SD卡。
硬件连接
(1)插入SD卡。
(2)使用RS232交叉串口母线和USB转RS232串口线连接实验箱的UART0和电脑的USB口。
(3)设置拨码开关为SD卡启动模式100。
(4)使用Micro USB线连接实验箱的USB OTG和电脑的USB口。
(5)连接电源线,先不要上电。

软件操作
接着进行软件部分操作。
(1)先在设备管理器查看串口的端口号。
(2)再设置串口调试工具,波特率设置为115200,点击连接,在Xshell调试终端会显示连接成功。
(3)连接成功后,拨动实验箱的电源开关,将实验箱上电。
(4)等待系统登录SD卡系统。
(5)登录成功后,在串口调试窗口执行以下命令,进入测试程序所在目录,运行程序。
(6)程序运行后蜂鸣器响起4声,说明蜂鸣器驱动正常。同时串口调试窗口打印相关信息。
(7)实结束后,实验箱断电,取下SD卡,将SD系统启动卡通过读卡器连接到计算机,连接到Ubuntu,执行命今替换回原来的ulmage文件。

-
超高性价比掌上型HIL丨EGBox Nano正式发布2025-03-25 3707
-
为什么更推荐Cortex-A55教学实验箱?我来告诉您!2024-05-31 2169
-
适用于ARM Cortex®—A53处理器和FPGA TPS65219 数据表2024-04-01 615
-
适用于ARM Cortex®—A53处理器A53处理器和FPGA的集成电源管理IC TPS65220数据表2024-03-27 548
-
创龙教仪基于瑞芯微3568的ARM Cortex A-55教学实验箱 适用于人工智能 传感器 物联网等领域2024-03-22 13165
-
适用于ARM Cortex®—A53 处理器TPS65219-Q1数据表2024-03-06 487
-
适用于AM64x Arm®Cortex®-A53 处理器的TPS6521855 电源管理 IC数据表2024-02-28 533
-
如何同时在cortex A53上运行Linux和在cortex M7上运行FreeRTOS?2023-03-21 664
-
Vivado里关闭R5/A53/GPU2022-05-09 3402
-
超高性价比AIO-3128C开源主板2018-05-16 3517
-
嵌入式Cortex-A9教学实验平台规格书V3.02016-03-03 1265
全部0条评论

快来发表一下你的评论吧 !
