

基于国产FPGA的运动控制加速卡
描述
现阶段,大部分的工业运动控制平台和数控运动中的控制中心为PC端控制器,通过PC端控制器控制伺服驱动器,从而实现机械系统中一个或多个坐标上的运动以及运动之间的协调,实现精确的位置控制、速度和加速度控制、转矩和力的控制等。同时,PC端控制器还需要控制其他传感器或运动单元。这种PC端控制器直接控制上述设备的方案,存在效率低、难以做到指令发送或接收的同步处理、延时较大、采集的数据无法做到准确同步等问题。因此需要简化PC端控制器的数据通信量、降低指令延迟、提升控制效率,同时需要获取同步后的数据。中科亿海微研制的FPGA运动控制加速卡主要完成PC端与伺服驱动器、相机、压力及柔性传感器等模块之间的数据通信、数据融合与数据监测。FPGA运动控制加速卡将复杂的控制卸载到FPGA中实现,简化了PC端控制器的控制流程,极大地减小了数据链路通信时间消耗。同时FPGA将同步后的数据发送到PC处理,使得数据处理流程更合理。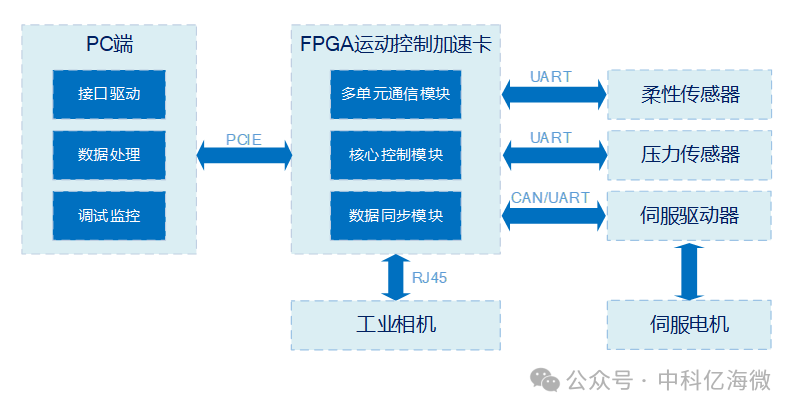
图 基于FPGA的运动控制加速方案系统构成框图
基于FPGA的运动控制加速方案主要由两块板卡构成:以EQ6HL130为核心的同步采集板、以EQ6HL9为核心的柔性传感器采集板。
以EQ6HL130为核心的同步采集板控制伺服驱动器,产生驱动控制伺服电机的指令,同时接收其应答指令,将指令解析处理后结果传输给PC端控制器作进一步操作;接收柔性传感器采集器采集的数据,解析后传输给控制器;接收压力传感器的数据,解析后传输给控制器。对所有接收数据打上时间戳,便于后续使用。
以EQ6HL9为核心的柔性传感器采集板通过AD采集柔性传感器的数据并组帧传输给同步采集板控制;将采集数据转换为压力值显示到显示屏上。
FPGA运动控制加速卡经测试,PC端控制器方案的系统指令延迟大于50ms。基于FPGA的运动控制加速方案的系统指令延迟小于100us,同时伺服电机应答数据、多传感器数据、相机数据能做到完全同步,更具使用意义。
-
FPGA硬件加速卡设计原理图:1-基于Xilinx XCKU115的半高PCIe x8 硬件加速卡 PCIe半高 XCKU115-3-FLVF1924-E芯片2026-02-12 703
-
FPGA PCIe加速卡开源硬件及例程介绍2023-03-24 7938
-
中科亿海微推出高性能FPGA加速卡系列产品2022-07-20 2419
-
基于加速卡的FPGA生态系统布局是怎样的?2021-06-17 2503
-
Achronix与BittWare共同研发FPGA芯片VectorPath加速卡2019-11-08 1041
-
Achronix和BittWare推出采用FPGA芯片的加速卡2019-10-31 1387
-
FPGA加速卡从芯片到系统的发展历程2019-08-12 1908
-
针对5G网络的FPGA加速卡平台和解决方案2019-08-07 5468
-
高性能FPGA计算加速卡2016-03-04 2905
-
LCD转VGA/AV/S-Video视频加速卡2009-09-21 1395
全部0条评论

快来发表一下你的评论吧 !
