

优象无人机光流模块使用技巧
电子说
描述
光流模块在无 GPS 环境下,课实时检测飞机水平移动距离,实现对四轴无人机长时间的稳定悬停。图1显示的是湖南优象LC-302光流模块的功能框图,光流摄像头拍摄无人机垂直向下的画面,输入光流主板,主板通过光流悬停智能算法进行光流计算,从而获取无人机位移信息,并转化为悬停控制指令,悬停控制指令通过 UART 输出给飞控,以便控制飞机水平移动距离,达到悬停的目的。
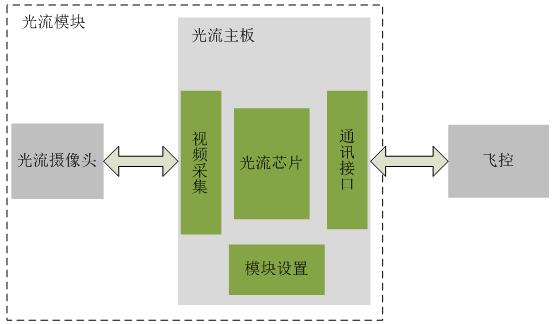
图 1 UPIXELS LC-302光流模块功能框图
LC-302外形尺寸结构图
LC-302的硬件部分主要为主板。如图2所示,主板尺寸结构示意图,尺寸分别为:长22mm、宽14mm。主板上主要的芯片为湖南优象公司研发的光流芯片U30。除了LC-302这款型号外,还有LC-306、LC-307和LC-309,其中LC-309尺寸最小,含U30、CMOS感光芯片和镜头一起,总共也只有10mm*10mm大小。
LC-302使用的是30万像素的CMOS作为感光器件,所有的配置使用U30芯片的默认配置,所以,模块一上电就可输出光流数据,不需要额外其他配置。
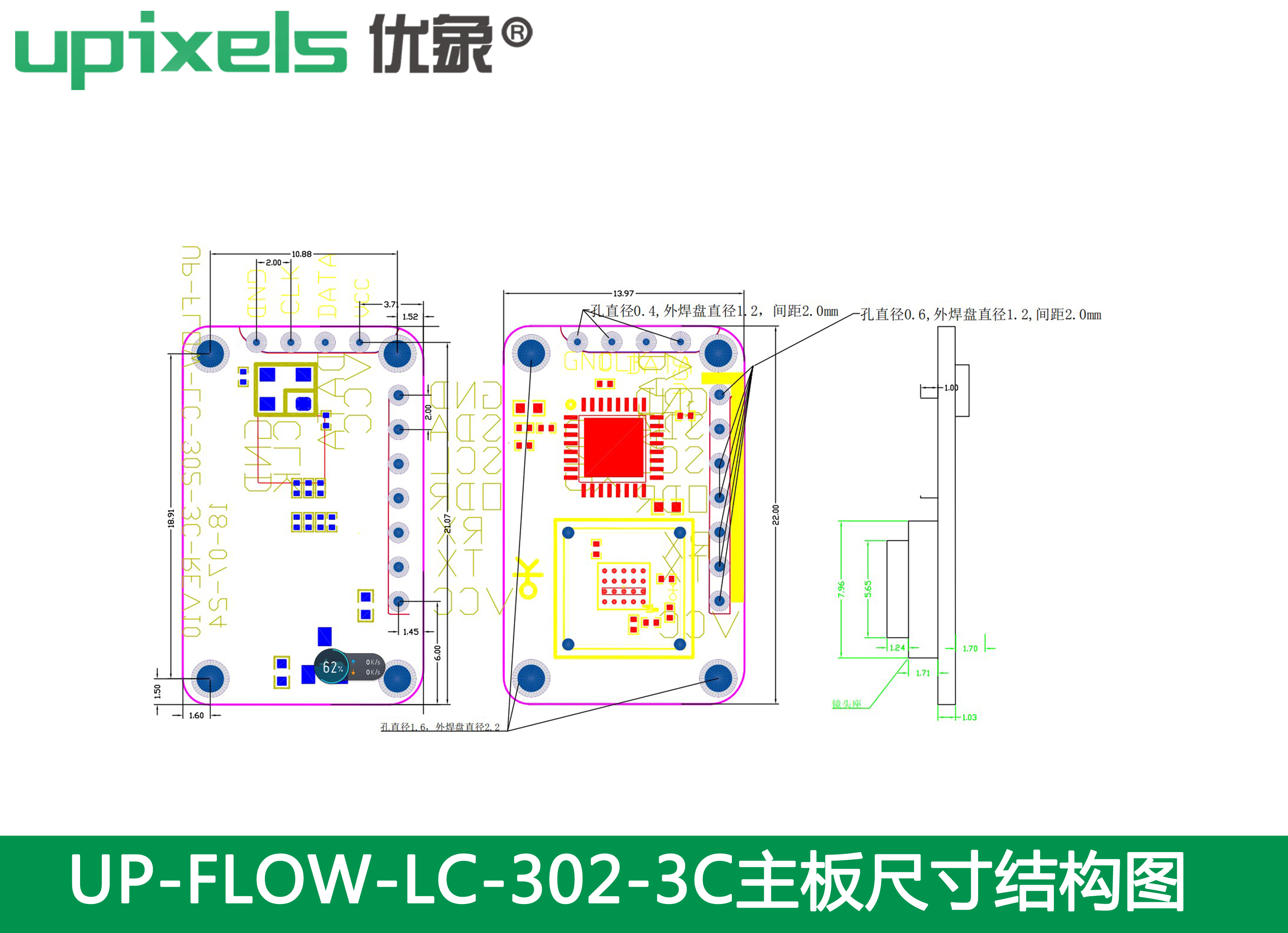
图 2 UP-FLOW-LC-302-3C产品结构图
LC-302接入飞控的方法/光流坐标系定义
光流模块可以用UART接口连接飞控,UART数据格式为1个起始位,8个数据位,1个停止位,无校验位,波特率为19200。光流模块和飞控的接口线序如图3,其中UART_TXD,UART_RXD是以模块为参考, VCC为3.0V—5.0V供电电源输入。3.0V供电时最大功耗为90mW,5.0V供电时最大功耗150mW。
光流模块接线说明:光流和飞控的 RX TX交叉连接,GND和VCC对应连接即可。
光流的坐标系如图4所示,最终飞控获取数据,需根据飞控坐标系及光流的坐标系,做坐标转换。

图 3 光流模块坐标系/接线方式
光流模块初始化
光流模块上电后需由上位机通过UART接口初始化才能正常工作,光流模块上电到上位机初始化之间需至少延时100ms。
LC-302光流模块对外输出数据结构定义
光流模块对外输出的数据结构定义如下:
typedef struct optical_flow_data
{
int16_t flow_x_integral; // X像素点累计时间内的累加位移(radians*10000)
// [除以10000乘以高度(mm)后为实际位移(mm)]
int16_t flow_y_integral; // Y像素点累计时间内的累加位移(radians*10000)
// [除以10000乘以高度(mm)后为实际位移(mm)]
uint16_t integration_timespan; // 上一次发送光流数据到本次发送的累计时间(us)
uint16_t ground_distance; // 预留。默认为999(0x03E7)
uint8_t valid; // 状态值:0(0x00)为光流数据不可用
//245(0xF5)为光流数据可用
uint8_t version; //版本号
} Upixels_OpticalFlow;
通过串口向飞控发送数据前,光流模块会对数据结构进行封包,实际发送的数据包格式如图6:
|
序号 |
|
包数据 |
内容说明 |
|
1 |
包 头 | 0xFE | 数据包的开始标识(固定值0xFE) |
|
2 |
0x0A | 光流数据结构体字节数(固定值0x0A) | |
|
3 |
光 |
flow_x_integral的低字节 |
X像素点累计时间内的累加位移,
(radians*10000) |
|
4 |
flow_x_integral的高字节 | ||
|
5 |
flow_y_integral的低字节 |
Y像素点累计时间内的累加位移,(radians*10000) [除以10000乘以高度(mm)后为实际位移(mm)] |
|
|
6 |
flow_y_integral的高字节 | ||
|
7 |
integration_timespan的低字节 | 上一次发送光流数据到本次发送光流数据的累计时间(us) | |
|
8 |
integration_timespan的高字节 | ||
|
9 |
ground_distance的低字节 | 预留。默认为999(0x03E7) | |
|
10 |
ground_distance的高字节 | ||
|
11 |
valid | 状态值:0(0x00)为光流数据不可用,245(0xF5)为光流数据可用 | |
|
12 |
version | 光流模块的版本号 | |
|
13 |
校验值 |
Xor | 光流数据结构体(Byte 3~Byte 12)10个字节的异或值 |
|
14 |
包 尾 |
0x55 | 数据包的结束标识(固定值0x55) |
图 6 数据包协议图
光流调试注意事项
1.安装前注意镜头清理,确保镜头无污垢和保护膜遮挡。
2.安装时注意,光流板与地面水平,并与机体(飞控板)垂直,不能有偏角,固定后确保镜头无遮挡,比如连接线与起落架等。
3.若要考虑与加速度计融合,则需确保光流与加速度计物理方向的一致性。
3.当姿态变化较剧烈时应减少光流的比重,并用陀螺仪做好对光流的补偿,并注意光流与陀螺仪同步问题。
4.光流输出有少许毛刺,需要对数据进行低通虑波
5.PID控制上采用位置+速度的双环控制,并要加大i的作用。
6.在自主悬停时才启动光流,飞机起飞与打摇杆时,光流无效。
LC-302悬停问题速查小技巧
自主悬停是光流模块支持飞控实现的一种典型功能。也是调试光流需要首先调试的功能,悬停的质量往往直接决定光流与飞控配合质量。调试悬停问题时有如下小技巧。
7.1 完全没有悬停效果,现象与没接光流是一样的。首先应检查板子上电是否正常,硬件线是否连接好,镜头是否被遮挡,如果都没发现问题,再用上位机检查是否有数据输出。
7.2 飞机往某个方向乱飞,漂移更快,像失控的感觉,而没有加光流时反而漂移慢一些。可能是:
7.2.1 镜头安装方向与程序里写的方向不一致;
7.2.2 环境光线明暗变化比较大,比如有闪光灯;
7.2.3 光流镜头下地面上有大片的运动物体,比如在有风时的水面上;
7.2.4 程序中光流控制部分有些数据没清零,比如起飞时与打摇杆后积分量没清零;
7.3 飞机缓慢飘,方向随机,但又比没光流时要好,表现为无操作时,往一个方向飘后,还会往回飘。可能是地面环境纹理太差,比如纯净的木地板、水泥地面、反光大理石地面等,或者是环境光线太暗。
7.4 飞机开始时能够正常悬停,悬停一段时间后开始震荡,可能是:
7.4.1 气压计数据漂移很大,高度严重失真,导致光流数据与该高度相乘后输出值变大,控制超调;
7.4.2 光流与加速度计有融合,可能是温度变化比较大或飞机震动大,导致加速度计漂移严重;
7.5 飞机开始时能够正常悬停,悬停一段时间后开始一直往一个方向漂移,可能是:
7.5.1 程序算法处理上光流的权重是动态的,某些原因导致悬停时间长后,光流权重减弱,无法抑制漂移;
7.5.2 姿态解算的欧拉角由于震动或温度等出现较大误差,时间久后飞机本身姿态倾斜,光流最大输出后也补偿不了该误差;
7.6 飞机一开始就开始震荡,可能是:
7.6.1 PID控制参数太大了;
7.6.2 滤波比较厉害,使得输出数据有延时,造成低频震荡;
7.6.3 输入数据不平滑,PID控制中又有D项,使得飞机高频震荡;
7.6.4飞机的性能变差,比如电机、桨叶磨损,震动大,使得输入数据噪声变大;
7.6.5光流旋转补偿没有做好,尤其是数据同步与限幅。
优象科技淘宝店铺链接:
https://shop215642435.taobao.com/?spm=pc_detail.27183998.202202.2.688c7dd6HXahpX#/
-
【TL6748 DSP申请】无人机光流视觉定位2015-10-09 2495
-
【ELF灵翼自拍无人机申请】灵翼航拍无人机测评2016-04-19 2909
-
【TG401_EVB开发板申请】无人机飞控光流技术2016-12-28 2821
-
无人机培训2017-02-13 4248
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7467
-
无人机技术解答2017-11-15 29068
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3820
-
什么是无人机图传系统?2019-08-09 13054
-
无人机光流模块使用技巧2019-08-12 8922
-
无人机悬停 优象科技LC302 V1.1光流模块2021-06-01 1846
-
【飞控开发基础教程4】疯壳·开源编队无人机-串口(光流数据获取)2022-05-27 3884
-
【飞控开发基础教程4】开源编队无人机-串口(光流数据获取)2022-07-13 2664
-
【疯壳·无人机教程11】开源编队无人机-串口(光流数据获取)2022-08-25 46243
-
【疯壳·无人机教程25】开源编队无人机-定高、定点、悬停2022-09-02 55724
-
如何使用优象光流芯片U30实现四轴无人机悬停2024-04-25 3599
全部0条评论

快来发表一下你的评论吧 !
