

基于单片机的直流伺服驱动器
控制/MCU
描述
1 引 言
直流伺服驱动器凭借其优异的驱动性能,在工业、医疗、国防等领域有着广泛应用。典型的直流伺服驱动器的结构如图1-1所示。整个系统是由电流环、速度环和位置环构成的多环控制系统。传统的伺服驱动器使用运放为核心的模拟电路构成,其有结构复杂、参数调整不易和系统性能易受环境影响等缺点。随着微处理器技术、模拟数字接口技术和功率半导体技术的长足发展,现代的直流伺服驱动器普遍采用由微处理器为核心的数字控制系统。以微处理器为核心的伺服驱动器不但可以方便实现以前用模拟电路无法实现的控制算法,并且有着结构简单、参数调整方便、系统性能对环境参数不敏感等优点。同时,数字控制系统还可以充分利用成熟的网络连接技术,实现多机并行运行。
1-1
2 芯片特性简介
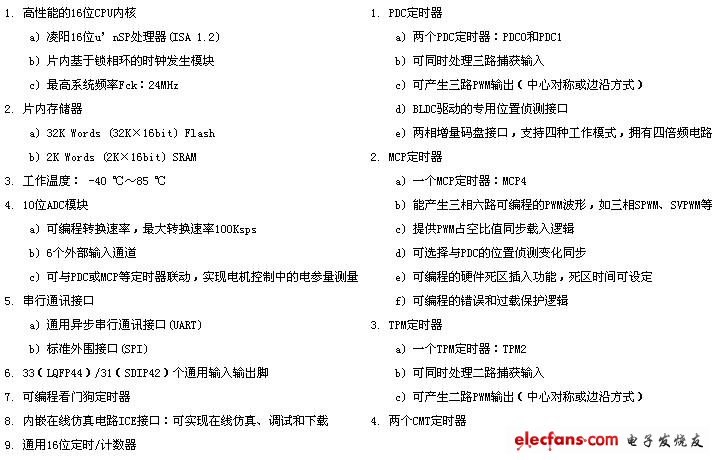
SPMC752313A是μ’nSP™系列产品的一个新成员,是凌阳科技新推出的专用于电机驱动的16位微控制器。其拥有性能出色定时器和PWM信号发生器。可以方便的实现各种电机伺服驱动方案。
SPMC75F2313A在4.5V~5.5V工作电压范围内的工作速度范围为0~24MHz,拥有2K字SRAM和32K字闪存ROM;最多33个可编程的多功能I/O端口;4个通用16位定时器/计数器(其中有一个电机驱动专用PWM波形发生器,一个位置侦测接口定时器),且每个定时器均有PWM发生的事件捕获功能;2个专用于定时可编程周期定时器;可编程看门狗;低电压复位/监测功能;8通道10位模-数转换。在这些硬件外设的支持下SPMC75F2313A在电机控制领域有相当优秀的表现。SPMC75F2313A的特性如下:
点击看原图
3 系统总体方案介绍
本伺服驱动器主要由凌阳SPMC75F2313A、由IRF540组成的功率全桥和各种接口模块组成,其结构框图如图 3-1所示。驱动器使用带电流环的位置伺服结构,其中位置伺服环可根据需要选择是否接入系统。驱动器使用20KHz的双极性PWM,以保证系统良好的动态性能。
3-1
5-1
各控制环的核心服务子程序的流程如图 5-2所示。这几部分是整个系统的核心,其性能也决定了整个驱动器的性能。因此,这几部分使用纯汇编编写,相应的PID算法也根据不同控制环的特点进行相应的结构调整和性能优化。以最大限度保证这几部分程序的性能和实时性。
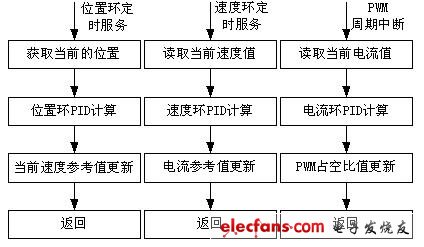
图 5-2 PWM周期中断服务子程序流程图
系统控制部分是整个系统协调的心脏。整个系统都在其协调下有条不紊的工作。这部分主要是根据系统设置和当前系统的状态给出相应的控制信息,以确保系统的可靠运行。
人机接口界面程序,这部主要是为用户提供一个简单易用的交互接口,以方便用户对驱动器的可靠控制。包括驱动器的起停、各种运行参数的设置都在这一层面上进行。
6 结 语
通常,在开发伺服驱动设备的过程中,需要编写实时性、程序可读性强的代码,这时就需要采用混合编程。而凌阳的m’nSP™ IDE具有良好的编程环境,它可以很轻松、容易地进行混合编程(在C程序中调用汇编程序,在汇编程序中调用C程序)。
该系统用了SPMC75F2313A三个定时器和约30个IO口资源,其实SPMC75F2313A的资源相当丰富。因其有专业的电机驱动硬件支持,电机驱动系统开发变得相对简单。因此,基于SPMC75F2313A的电机伺服驱动器系统在工业、医疗、国防等领域有广阔的应用前景。
-
单片机和伺服有什么区别2025-05-26 649
-
如何调试伺服驱动器2024-11-04 2688
-
上位机控制伺服驱动器的作用是什么2024-06-06 1990
-
伺服驱动器的作用与原理、应用领域2024-01-17 10558
-
使用驱动器控制直流无刷伺服电机2022-01-14 1985
-
L6203直流电机驱动器设计原理图及51单片机例程2021-09-28 2107
-
基于MSP430单片机的多功能直流电机驱动器2021-09-22 980
-
基于AT89S51单片机的直流无刷电动机驱动器设计2021-09-16 1280
-
非单片机制作的简易直流有感无刷电机(BLDC)驱动器2021-07-26 3088
-
基于ARES直流伺服驱动器技术应用2017-10-02 1162
-
用单片机控制伺服驱动器控制交流伺服电机。用什么单片....2014-04-21 7103
-
使用Stellaris(群星)单片机驱动直流无刷电机2010-04-06 901
-
32段LCD驱动器AY0438及其与单片机的接口设计2009-09-26 1850
-
基于SPMC75F2313A的直流伺服驱动器2009-09-19 1818
全部0条评论

快来发表一下你的评论吧 !
