

基于PSpice System Option接口的直流电机控制系统设计
描述
概述
基于仿真速度和结果精度之间的权衡,在设计的第一阶段使用高精度模型不是一种有效的方法。高精度模型会使仿真速度变的非常慢,建议在设计过程中的每个阶段使用合适的模型。可能会发现,合适的模型会更容易优化系统参数。
本文将用实例的方式演示以分段建模的方式优化直流电机控制系统。
直流电机控制系统
下面是直流电机控制系统的示意图:
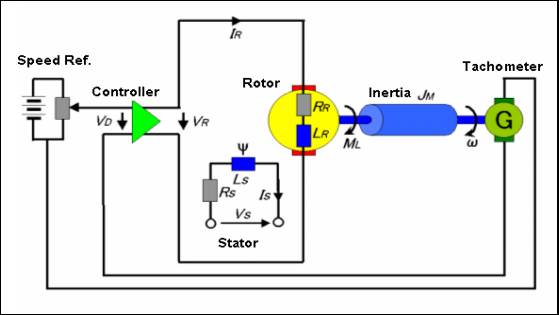
图1 直流电机控制系统
该图由定子或励磁绕组组成,该绕组产生恒定的励磁磁通量。该绕组由电感Ls和电阻Rs建模。当电压Vs施加到定子绕组时,电流is流动,产生磁通Ψ。转子绕组也通过其电感LR和电阻RR来建模。当电压VR施加到转子绕组时,电流IR流动。VR是由差分输入电压VD驱动的控制器的输出。信号流是从VD到VR,但不是在相反的方向上。因此,转子和定子之间的电枢反作用被忽略。
定子
首先,我们写出定子绕组的数学方程式:
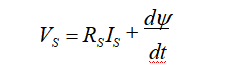
通常,磁通量Ψ是定子电流Is的非线性函数。为了简单起见,我们假设Ψ是Is的线性函数:
y = LS IS
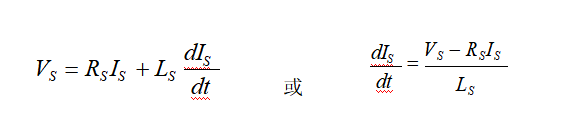
因此我们可以得到:
转子
对于转子绕组的数学方程,我们得到

VI是当转子绕组在励磁场中旋转时在转子绕组中感应的相反的电动势。VI可以写成常数C1、通量Ψ和角速度ω的乘积。
V1 = C1yw
机械动力学
对于转子轴上的力矩,我们可以写出平衡方程:
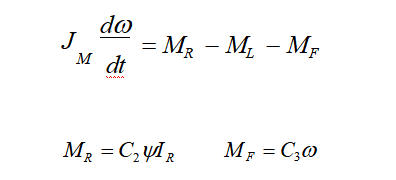
MR是转子驱动转矩,它是励磁磁通Ψ和转子电流IR乘以常数C2的线性函数。ML是给定的负载力矩,MF是电机的内摩擦力矩,假设它是角速度ω乘以常数C3的线性函数。JM是与转子机械连接的所有旋转质量的惯性矩。控制器
控制器由设置的标称角速度ωS的速度电位器电压和与角速度ω成正比的转速表电压之间的电压差VD驱动。我们可以将VD写成角速度之差乘以常数C4:
VD = C4 (ωS -ω )
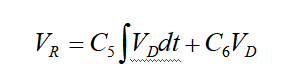
对于控制器,我们使用PI特性,其描述如下:
Simulink 模型
首先,我们在Simulink中对整个系统进行建模。
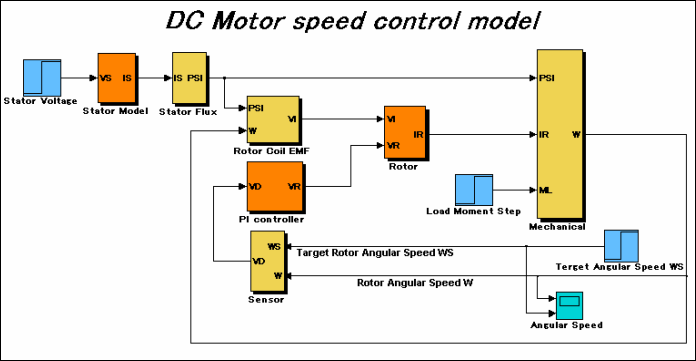
图2 Simulink 模型
参数
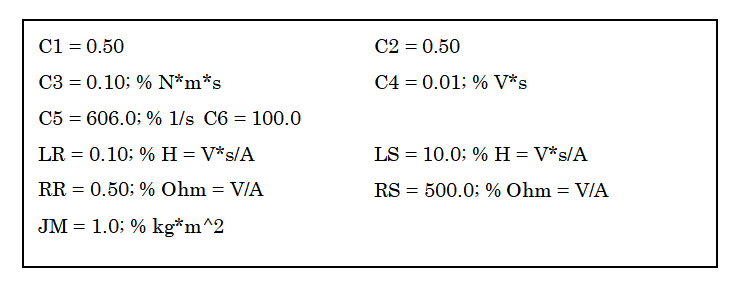
Simulink 模型结果
角速度ωS(t)和ω(t)的曲线如下所示。定子电压VS在时间t=1s处被接通。ωS在2s时设置为50 rad/S,转子开始转动。在t=6s左右,ω达到50 rad/s的稳态。
在t=7s时,施加50 Nm的负载力矩,转子速度降至43.6 rad/s。因此,控制器增加VR,在t=10s左右再次达到ωs=50 rad/s的新稳态。
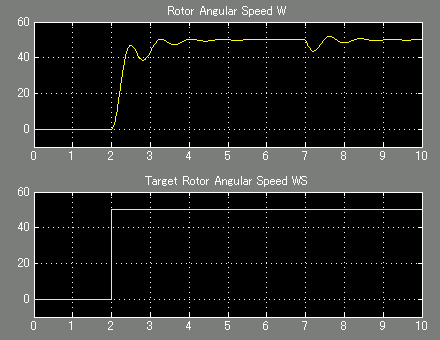
图3. Angular velocitiesω(t) and ωS(t)
Simulink-PSpice 模型(理想运放)
参考Simulink模型的仿真结果,我们现在将把一些Simulink块替换为PSpice电路。下面是系统框图
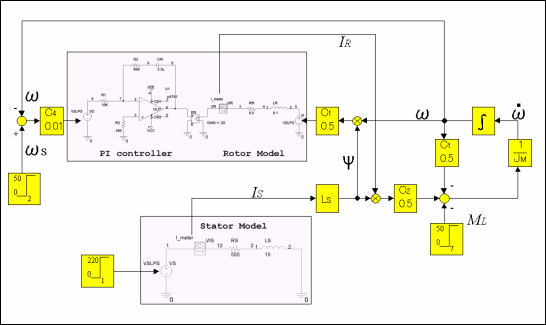
图4. 系统框图
Simulink 模型(理想运放)
下面是Simulink模型,其中包括使用SLPS的PSpice电路。
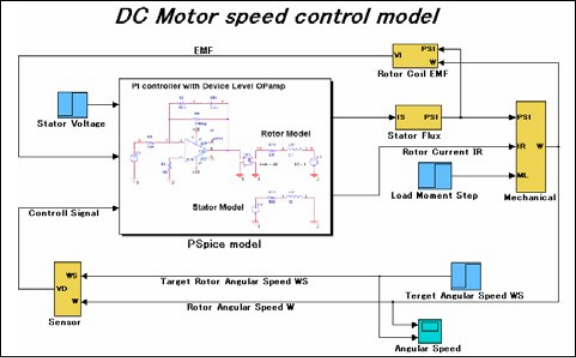
图5. Simulink 模型
PSpice 电路(理想运放)
定子、转子和PI控制器采用PSpice建模,如下所示。
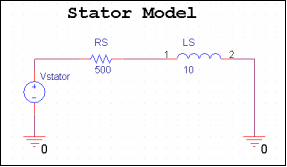
图6.定子电路
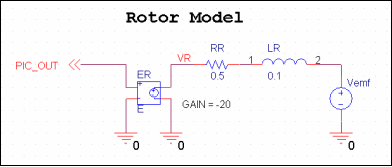
图7.转子电路
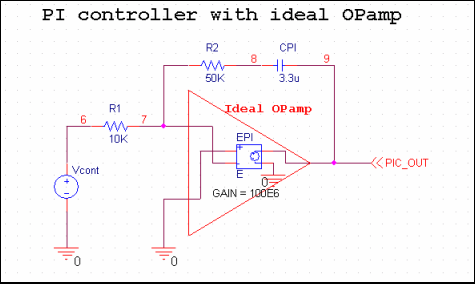
图8. PI 控制电路
电路元件VS、RS、LS和ER、RR、LR实现dIs/dt和dIR/dt的等式。对于PI控制器中的运算放大器,我们首先使用一个理想的模型,该模型具有很高的开环增益、无限输入电阻、零输出电阻、零输入偏置电压、零输入偏移和偏置电流,并且没有输出电压饱和。这种行为很容易在PSPICE中通过线性电压控制电压源进行建模。PI控制器输出电压V(9)(PIC_OUT)由以下等式给出。
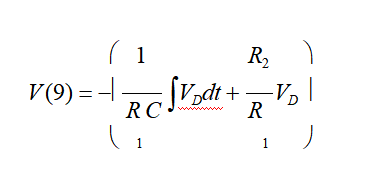
有了这些因素

I和P特性相交的角频率f0为:

电压V(9)控制增益值为-20的电压控制电压源ER。因此,我们得到

将此方程与Simulink模型中的VR方程进行比较,我们注意到两者是相同的,因为常数C5=606和C6=100。因此,PSpice控制器电路在Simulink模型中实现了与子系统PI控制器相同的VR方程。
Simulink-PSpice模型仿真结果
仿真结果如下:
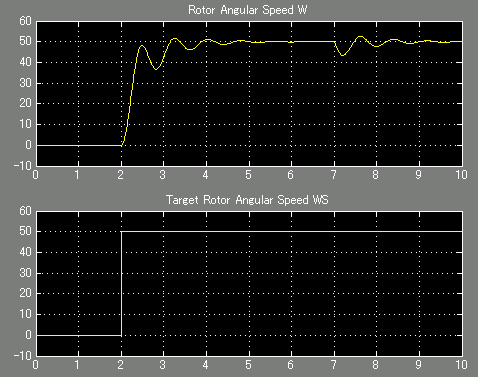
图9 理想放大下的PI控制器的ω(t) 和 ωS(t) f
Simulink-PSpice 模型(实际运放)
PSpice电路(实际运放)
我们现在用标准μA741 OPamp的设备级模型取代PI控制器中的理想OPamp模型。
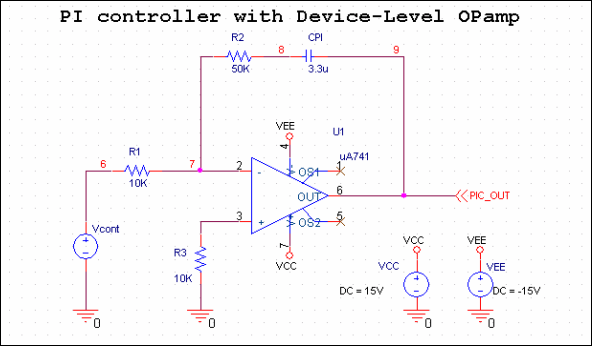
图10. 使用μA741的PI控制器电路
Simulink-PSpice 仿真结果(实际运放)
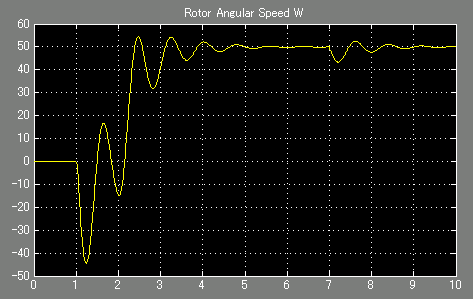
图11. 使用μA741的PI控制器的ωS(t)
在1s点开启激励后,电机开始反向转动。显然,设备级模型的行为与控制器中使用的理想运放模型不同。这是因为在t=0直流工作点计算时,由于输入失调电压和非常高的开环增益,运放输出进入饱和状态。
PSpice电路(直流反馈)为了避免偏移问题,在反馈回路中加入了10MΩ电阻器R4,将直流增益限制在1000。
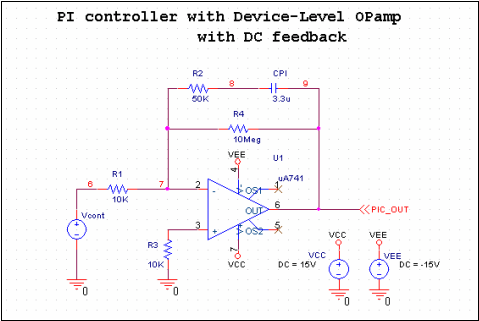
图12. 带直流反馈的PI控制电路
Simulink-PSpice 仿真结果(直流反馈)
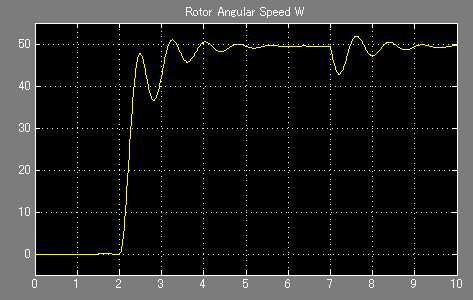
图13. ωS(t)(R4=10MΩ)
由于运放输出偏置电压降低,相反方向的初始瞬态也降低。直流增益降低的负面影响是ω(t)的稳态响应与50 rad/s略有不同。
通过在设计过程的每个阶段选择不同的模型,您可以快速查找并解决问题。首先用理想模型建模,就可以确定近似参数。然后,您可以将这些理想模型替换为线性电子元件,然后再替换为非线性器件,以进行最终电路验证。在Simulink中使用PSpice (SLPS)可以减少设计修改的次数,并使您的设计周期更短。
总结
PSpice System Option软件模块将cadence仿真技术和MathWork 的Simulink-MATLAB仿真包整合在一起形成一个强大的联合仿真环境。
Simulink是一个多领域仿真和基于模型的动态系统仿真平台,与PSpice软件紧密集成,这允许设计人员执行系统级仿真,其中包括物理器件的实际电气模型,在早期的设计过程中也可以发现设计和集成问题,减少原型设计的迭代次数。集成还能够使机电系统的设计人员(如控制块,传感器和功率转换器)能够实现集成系统和电路仿真。
-
智能小车的直流电机控制2009-03-06 3788
-
基于STM32的无位置传感器无刷直流电机控制系统2015-11-09 1307
-
变论域模糊控制的无刷直流电机控制系统2016-04-01 706
-
基于DSP的无刷直流电机模糊控制系统2016-04-05 1084
-
基于TMS320LF2407的无刷直流电机控制系统2016-05-05 832
-
基于单片机的红外遥控直流电机控制系统设计2017-01-22 1659
-
DSP在无刷直流电机控制系统仿真中的应用2017-10-20 1523
-
基于TL494的直流电机控制系统设计2018-02-16 10799
-
无刷直流电机驱动控制系统的研制资料下载2018-02-24 1740
-
两相无刷直流电机矢量控制系统2018-03-10 4784
-
基于SENT协议的有刷直流电机控制系统设计2021-09-18 1389
-
基于51单片机的直流电机控制系统Proteus仿真2022-02-07 2778
-
基于单片机的直流电机控制系统设计2022-06-30 9789
-
无刷直流电机控制系统是什么2023-03-06 3248
-
直流电机控制的基本方法2023-03-26 10108
全部0条评论

快来发表一下你的评论吧 !
