

深入解读毫米波雷达原理与应用
MEMS/传感技术
描述
当前最火的行业当属新能源汽车,而新能源汽车一个最最最重要的特点就是——智能化,自动驾驶,智能感知可以说是新能源汽车的一个大大的买点。就比如最新发布的小米Su7,理想L6和问界M5,智能化就是其最大的卖点,而智能化除了软件的支持外,还有一个最重要的部件就是雷达,激光雷达,毫米波雷达,超声波雷达都是新能源汽车智能感知的重要组成部分。
在问界M5智驾版的介绍中,就应用到了1个高精度激光雷达,3个毫米波雷达和12个超声波雷达组成。
(来自问界官网,HUAWEI ADS 2.0 高阶智能驾驶系统,拥有 27 个感知硬件,由 1 个远距高精度激光雷达 + 3 个毫米波雷达 + 2 颗 800 万像素高感知前视摄像头 + 9 颗侧视、环视、后视摄像头 + 12 个超声波雷达所组成,配合高性能计算平台 + 华为拟人化算法加持,一跃成为高阶智能驾驶的新典范。)
那么什么是毫米波雷达?他究竟有哪些神奇之处?我们今天一起来学习一下。
No.1
什么是雷达?
我们习惯了雷达这个词,其实雷达是一个外来词,一个音译词,来源于英语Radar,发音/ˈreɪ.dɑːr/,而雷达也不是在英语中一开始就有的,它是一个首字母缩写词,全称为 Radio Detection and Ranging,也就是无线电探测与测距。这也是雷达这个词的基本意义,利用无线电来发现目标和测量距离。
随着技术的发展,雷达的应用和功能早已超脱了探测和测距这个基本范围,比如测速,测角,目标识别,目标成像,战场侦察等等。但是只要用到电磁波来进行探测的技术,我们依然称为雷达。
所以雷达,它不姓雷,他姓Radio,也就是无线电波,应用最为广泛的电磁波频段。
电磁波的频谱如下,除了无线电波Radio之外还有红外线,可见光,紫外线以及更高频的x射线和伽玛射线。
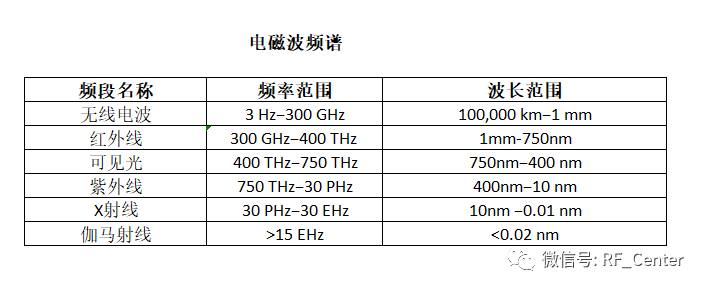
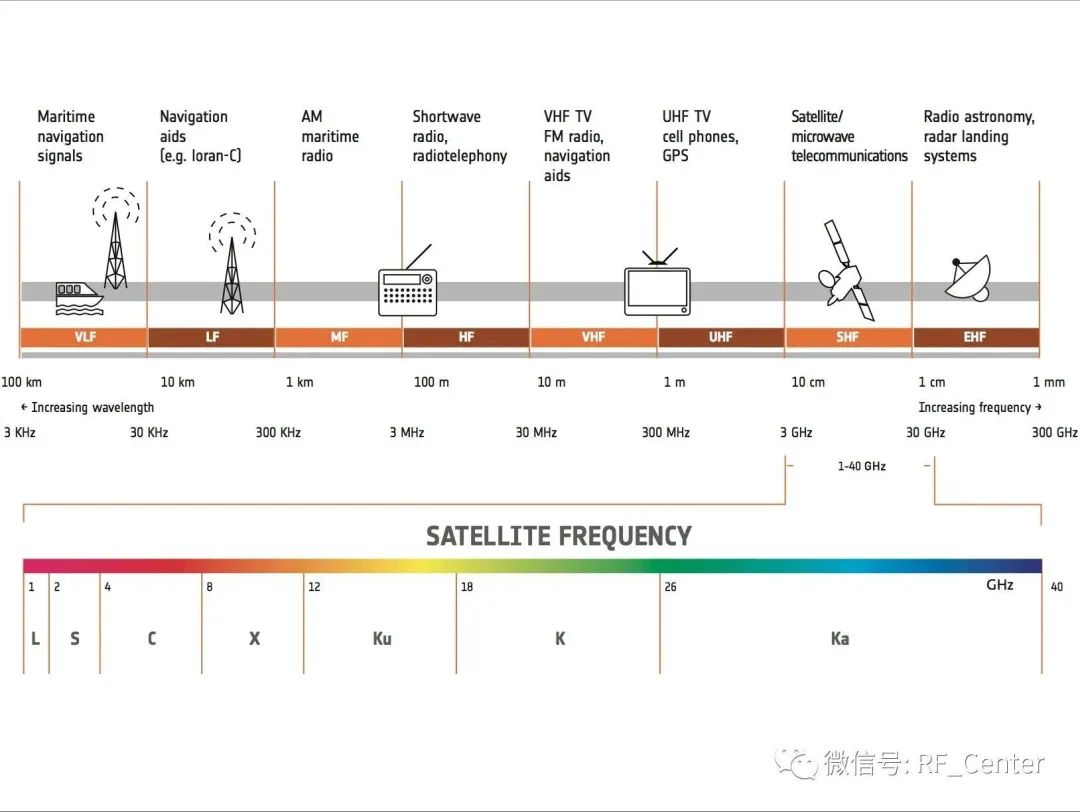
而无线电波中根据电磁波波长,又可分为长波,短波,米波,厘米波,毫米波以及亚毫米波,如下图所示。
那么毫米波雷达,就是利用无线电波里的毫米波来进行探测和测距的装置,电磁波波长为10mm到1mm,对应的频率为30GHz到300GHz。除了毫米波雷达,还有厘米波雷达,以及米波雷达。
雷达的工作原理如下图所示
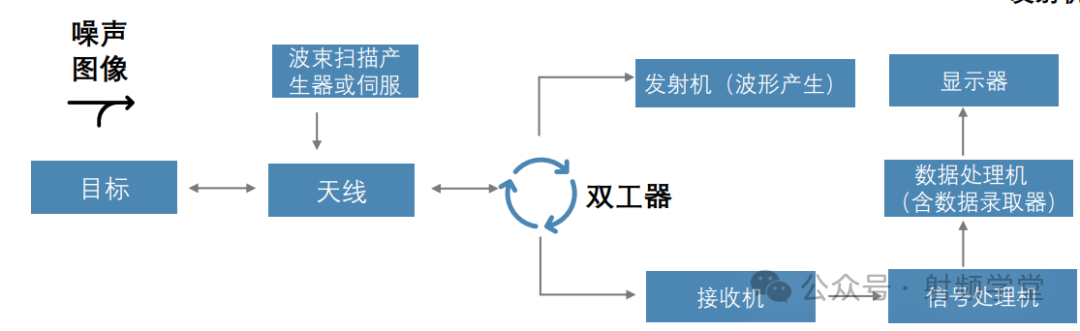
发射机产生的雷达信号经由天线发射出去,目标截获并反射一部分雷达信号,有一部分反射信号被雷达接收机接收,雷达天线收集回波信号,经接收机放大 和滤波处理后发送至信号处理机和数据 处理机进行处理,最终输入到显示器上。
雷达按照不同的维度可以分为不同类别,比如按照电磁波信号类型可分为脉冲雷达,连续波CW雷达和调频连续FMCW波雷达。
按照使用场景又可分为军用雷达和民用雷达;
按照天线配置可分为单站雷达,双基地雷达和电子扫描阵列雷达;
按照载波又可分为厘米波雷达,毫米波雷达,激光雷达,宽带雷达等;
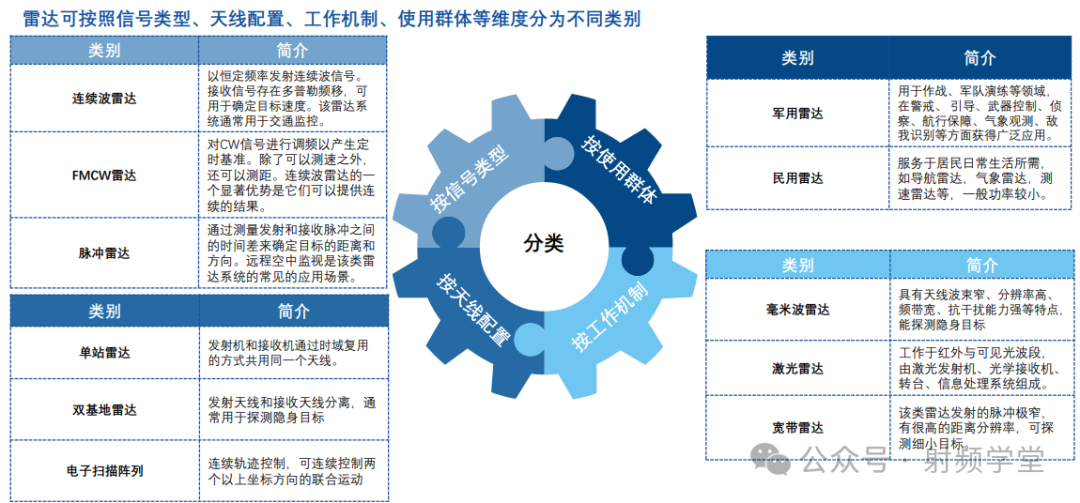
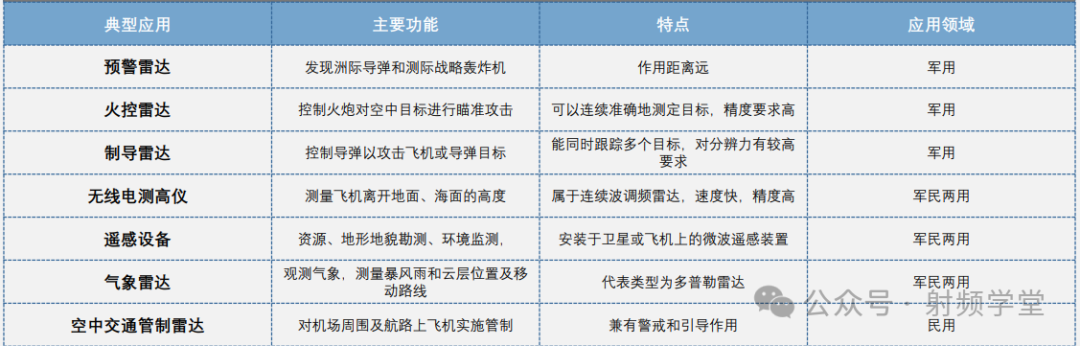
不同的雷达,其功能和应用场景也不同。
No.2
雷达的历史
讲到雷达,就不得不提电磁波的历史。
这种看不到摸不着的东西,确实让人们煞费苦心,要不是天才科学家麦克斯韦的预言,我想,有可能现在我们还处于通信基本靠吼的时代。
磁的应用比较早,我们的祖先黄帝就是用了磁铁制造了司南,打败了蚩尤;而典的认知更多的是早期人们对闪电的恐惧;电和磁在奥斯特的实验中发生了第一次握手,而后在法拉第的电磁实验中产生了更紧密的耦合,一直到天才物理学家麦克斯韦推导出了麦克斯韦方程组,电和磁才真正走到了一起,进而推导出了电磁波的存在。
一直到1885年-1889年,赫兹通过一系列实验证明了电磁波的存在,并成功测量了电磁波的波长和速度,电磁波才真真正正的走入人们的视野,也逐渐进入人们的生活,直到今天,不可替代。
我们都知道回声的原理,当我们对着高大的建筑物或者大山大声说话的时候,我们的声波会被建筑物反射回来,形成回声。利用回声的时差,人们可以粗略的估算大山的距离。
所以,当赫兹证实电磁波的存在之后,研究者最先用到的就是电磁波的反射波原理来测量距离。
1904年,德国工程师斯蒂安·胡尔斯迈尔(Christian Hülsmeyer)正是基于赫兹的原理,发明了障碍物探测器和船舶导航装置,也就是最早的雷达,发明示意图如下图所示。
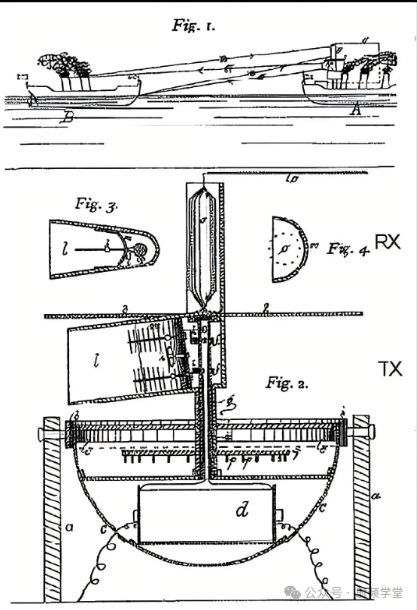
胡尔斯迈尔还建造了一座”雷达“,并公开演示了这个神奇的装置,并且成功将电磁波信号发射到一艘正在靠近的船上,并且成功接收到了反射信号。
只可惜,那个时候还相对和平,没有什么人对他的设备感兴趣。
直到1927年,Hans E Hollmann 博士进一步研究了该设备,并建造了第一个厘米波长的发射器和接收器,这就是第一个“微波”通信系统。汉斯-卡尔·冯·威尔森(Hans-Karl von Willsen)与霍尔曼(Hollmann)和第三位科学家冈瑟·埃尔布斯洛(Gunther Erbsloeh)合作,完善了一种设备,可以探测到大约8公里外的船只和大约30公里外在500米高空飞行的飞机。海洋系统被称为“Seetakt”,陆地系统被称为“Freya”——这三个系统可以说是创造了我们最常与雷达联系在一起的应用——探测和评估物体的距离。
真正的雷达就诞生了,伴随着第二次世界大战,雷达的技术和应用都得到了飞速的发展。
直到今天,最先进的雷达技术仍然是服务于战争的需要。
而随着自动驾驶技术的发展,毫米波雷达也成为了民用最广泛的一种雷达设备。
No.3
毫米波雷达的原理
毫米波雷达,就是利用毫米波来进行探测的装置,我们先来说一下毫米波的优点和缺点。
毫米波的工作波长在10mm到1mm之间,对应的工作频率为30GHz到300GHz,是处于微波和光波之间的一段电磁波频谱,所以呢,毫米波雷达兼具微波和光波的双重优点,总结如下:
| 小天线口径、窄波束:高跟踪和引导精度;易于进行低仰角跟踪,抗地面多径和杂波干扰;对近空目标具有高横向分辨力;对区域成像和目标监视具备高角分辨力;窄波束的高抗干扰性能;高天线增益;容易检测小目标,包括电力线、电杆和弹丸等。 |
| 大带宽:具有高信息速率,容易采用窄脉冲或宽带调频信号获得目标的细节结构特征;具有宽的扩谱能力,减少多径、杂波并增强抗干扰能力;相邻频率的雷达或毫米波识别器工作,易克服相互干扰;高距离分辨力,易得到精确的目标跟踪和识别能力。 |
| 高多普勒频率:慢目标和振动目标的良好检测和识别能力;易于利用目标多普勒频率特性进行目标特征识别;对干性大气污染的穿透特性,提供在尘埃、烟尘和干雪条件下的良好检测能力。 |
| 良好的抗隐身性能:当前隐身飞行器上所涂覆的吸波材料都是针对厘米波的。根据国外的研究,毫米波雷达照射的隐身目标,能形成多部位较强的电磁散射,使其隐身性能大大降低,所以,毫米波雷达还具有反隐身的潜力。 |
当然也有其劣势,比如雨、雾和湿雪等高潮湿环境的衰减,以及大功率器件和插损的影响降低了毫米波雷达的探测距离;树丛穿透能力差,相比微波,对密树丛穿透力低;元器件成本高,加工精度相对要求高,单片收发集成电路的开发相对迟缓。
取其有点,去其糟粕,毫米波雷达的应用主要在:
| 高精度多维搜索测量:进行高精度距离、方位、频率和空间位置的测量定位; |
| 雷达安装平台有体积、重量、振动和其它环境的严格要求:毫米波雷达天线尺寸小、重量轻,容易满足便携、弹载、车载、机载和星载等不同平台的特殊环境要求; |
| 目标特征提取和分类识别:毫米波雷达高分辨力、宽工作频带、大数值的多普勒频率响应、短的波长易获得目标细节特征和清晰轮廓成像等特点,适于目标分类和识别的重要战术要求; |
| 小目标和近距离探测:毫米波短波长对应的光学区尺寸较小,相对微波雷达更适于小目标探测。除特殊的空间目标观测等远程毫米波雷达外,一般毫米波雷达适用于30 km 以下的近距离探测; |
| 抗电子战干扰性强:毫米波窗口可用频段宽,易进行宽频带扩频和跳频设计。同时针对毫米波雷达的侦察和干扰设备面临宽频带、大气衰减和窄波束等干扰难题,毫米波雷达相对微波雷达具有更好的抗干扰能力。 |
所以呢,毫米波雷达在导弹制导,炮火控制,等军事领域得到了广泛的应用,同样配合激光雷达和摄像头的应用,毫米波雷达在智能汽车和自动驾驶上也得到了广泛的应用。
毫米波雷达在智能汽车上的应用,主要在测距,测速和测角三个方面。以 FMCW 雷达系统为例,其基本功能实现原理为:
FMCW雷达的信号的频率随时间线性上升,如下图所示,这种类型的信号也称为线性调频脉冲。
下图是FMCW信号的波形,振幅A和随时间的变化。
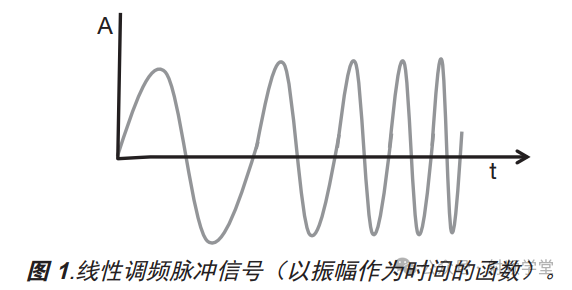
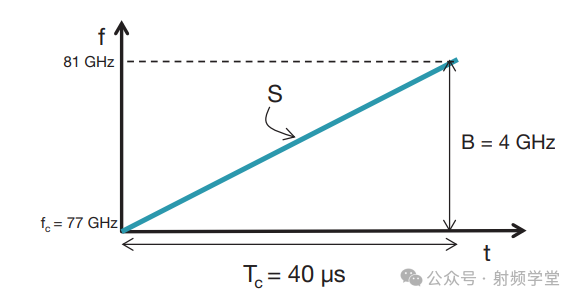
如果以频率作为时间的函数的话,其波形如下图所示:
MCW 雷达系统发射线性调频脉冲信号,并捕捉其发射路径中的物体反射的信号。其发射频率和接收频率随时间的函数如下图所示
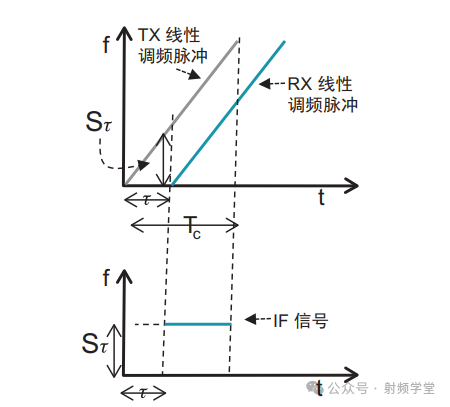
那么利用这个时间差,就能够快速得到目标的距离。
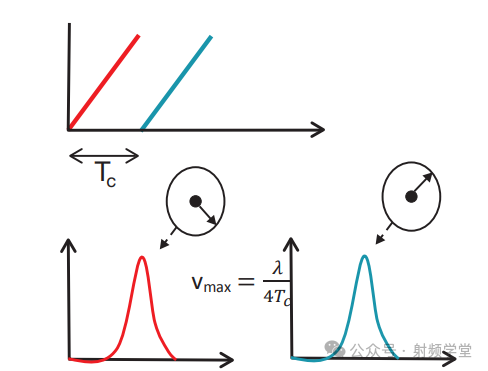
同样道理,我们利用两个FMCW信号就可以得到目标的速度。
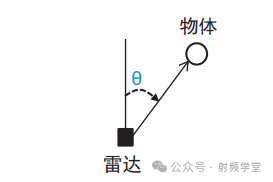
FMCW雷达利用水平面也可以估算反射信号的角度,如下图所示,这个角度也叫做达到角(AoA)
当然,对于移动的物体,在计算中要考虑多普勒效应。
No.4
车载毫米波雷达
车载毫米波雷达目前常用的工作频率有24GHz、60GHz、77GHz、80GHz,频率越高,波长越短,其精度也就越高。
在华为官网上有介绍一款ASN850毫米波感知雷达,工作频率在80GHz,探测距离大于1000米,探测宽度可达到10车道,详细的性能指标如下图所示。
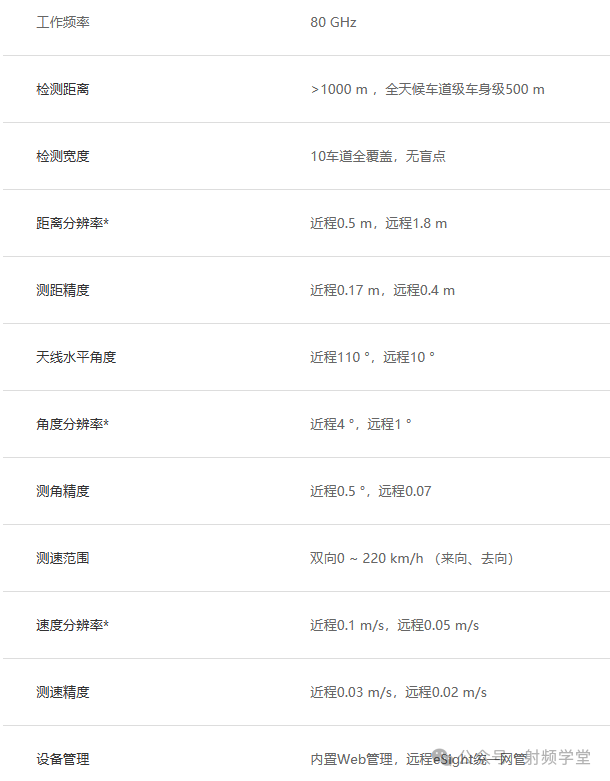
像上文提到的测距,测速,测角这三种功能,在这款雷达上都具备,行业内也称这种类型的雷达为3D雷达,但是没有高度信息,这个在智能驾驶中也会引起误判,也是传说中特斯拉当初弃用毫米波雷达的原因之一。
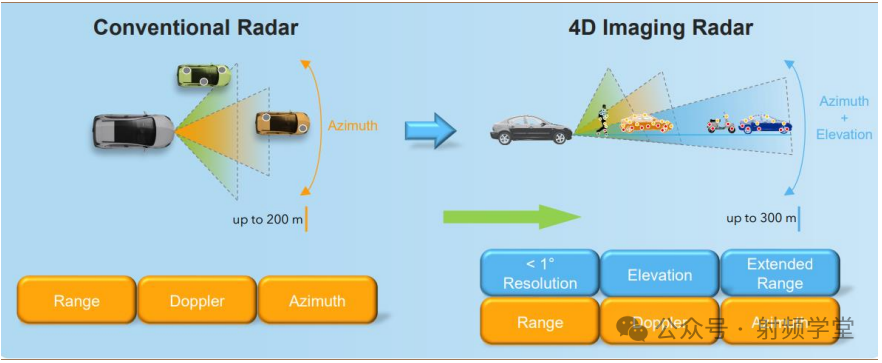
不过随着技术的发展,4D雷达开始显露头角,在传统的测距,测速,测角的基础上,加上了测高度的功能。
相比传统毫米波雷达仅能判断出前方有障碍物,4D毫米波雷达增加了纵向天线及处理器,可以接收更多信息返回点,并像激光雷达一样呈点云图,能呈现出更多细节信息,探测出障碍物的形状,弥补了传统雷达难以识别静态障碍物的短板。
基于TI的AWR2243芯片的4D雷达城市道路交通参与者目标分类与检测研究,包括同济大学测试场采集的目标检测与分类数据集可视化结果表明,4D雷达可以输出有高度的目标点云,反映目标的轮廓外形。虽然与激光雷达点云成像原理不同,仅从毫米波雷达的点云还无法准确判断一个目标额外形等特征,但是其点云的散射特征具备一定规律。
随着4D成像雷达技术的发展,毫米波雷达在智能驾驶中的应用也越来越广泛。
审核编辑:黄飞
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2364
-
关于电磁波与毫米波雷达之间的影响2022-04-23 39306
-
漫谈车载毫米波雷达历史2022-03-09 12132
-
有关毫米波雷达的检测和角度测量2021-11-10 8099
-
雷达传感器模块,智能存在感应方案,毫米波雷达工作原理2021-10-28 4079
-
毫米波雷达的特点是什么2021-07-30 7414
-
毫米波雷达(一)2019-12-16 15065
-
浅析车载毫米波雷达2019-09-19 7000
-
车载毫米波雷达的原理是什么?2019-08-07 7699
-
毫米波雷达是什么?2019-08-02 4739
-
车载毫米波雷达的技术原理与发展2019-05-10 6255
-
求推荐毫米波雷达2018-12-25 4935
-
毫米波雷达方案对比2018-08-04 12522
-
毫米波雷达的应用场景_毫米波雷达技术及应用大解析2018-04-24 48518
全部0条评论

快来发表一下你的评论吧 !
