

ZMC900E控制器之ROS2环境安装指南
描述
ZMC900E是致远电子研发的最新一代高性能EtherCAT控制器,支持ROS2系统,兼备强大功能和实时性,为工业应用带来新的可能。本文将详述ROS2特点和安装,助力用户在机器人上的二次开发和应用。
图1 ZMC900E高性能EtherCAT主站控制器
ZMC900E 是ZLG致远电子开发的最新一代EtherCAT主站控制器,其核心采用多核异构的应用处理器,内核包括4+1个64位的ArmCortex-A55核,主频2GHz;3个Cortex-R5F内核,主频800MHz。同时板载4GB LPDDR4、8GB eMMC以及32KB FRAM。
ZMC900E EtherCAT主站控制器为了满足不同的自动化应用需求,集成1路专用EtherCAT口、3路通用以太网、1路CANFD、1路RS485、1路TF卡、1路USB3.0 Host、1路HDMI接口、16路Dl数字输入、16路DO数字输出等接口,灵活满足自动化设备应用需求。

图2 ZMC900E接口
ROS因其强大的功能而备受机器人应用开发者的欢迎,而新一代的ROS2更具有产品化特性,结合新一代高性能的ZMC900E EtherCat控制器将给工业应用带来更多想象力。下面就详细介绍ROS特性以及ROS2在ZMC900E上的安装步骤。
 ROS是什么?
ROS是什么?
ROS(Robot Operating System),这一为机器人软件程序编写的软件架构,展现了其独特的灵活性。其起源可追溯到斯坦福大学的STanford Artificial Intelligence Robot(STAIR)与Personal Robotics(PR)项目,象征着机器人领域的创新与探索。
在机器人行业,工业界与学术界在软件工具的使用上呈现出截然不同的态度。工业界倾向于构建封闭的生态系统和设置高技术壁垒,以保护其核心优势。而学术界则更偏向于拥抱开源社区,选择现有的工具进行研发,其中,ROS便是学术界广受欢迎的开源工具。自2010年首个ROS版本发布以来,它基于PR2机器人构建了一系列基础软件包,并不断进行迭代更新。随着Ubuntu系统长期支持(LTS)版本的演进,ROS也逐步升级,目前最新的版本已经与Ubuntu 20.04 LTS完美兼容。尽管ROS的CI测试主要在Ubuntu上进行,但社区成员的努力使得ROS在其他Linux版本、Mac OS X、Android、Windows等平台上也具备一定的兼容性,尽管功能支持可能受到一些限制。 图3 ROS软件集合
图3 ROS软件集合
 ROS的的优缺点分析
ROS的的优缺点分析
ROS作为一种广泛使用的机器人软件架构,为开发者提供了许多便利,但同时也存在一些明显的问题和挑战。以下是对ROS的优缺点进行的分析:
1. 优点
- 松散耦合的机制提供框架:ROS采用了一种松散耦合的设计,使得各个组件之间的通信更加灵活和方便。这种设计使得开发者可以根据需要轻松地添加、删除或修改功能,而无需对整个系统进行大规模的修改。
- 丰富的机器人功能库:ROS提供了大量的机器人功能库,涵盖了感知、导航、控制、定位、建图等多个方面。这些库为开发者提供了丰富的资源,可以加速机器人应用的开发进程。
- 庞大的用户群体:ROS在机器人领域拥有庞大的用户群体,这意味着开发者可以更容易地找到帮助、解决问题和分享经验。同时,这也促进了ROS社区的发展,使得ROS不断完善和进步。
- 免费开源:ROS是一个开源项目,这意味着任何人都可以免费地使用其中的代码、库和工具。这为开发者提供了更多的选择和灵活性,同时也促进了机器人技术的普及和发展。
- 便利的数据记录、分析、仿真工具:ROS提供了一系列的数据记录、分析和仿真工具,使得开发者可以更方便地进行机器人系统的测试、调试和优化。
2. 缺点:
- 通信实时性能有限:由于ROS的通信机制是基于消息的发布/订阅模式,因此在实际应用中可能会遇到实时性能有限的问题。特别是在高负载或复杂场景下,通信延迟和丢包等问题可能会影响系统的性能。
- 系统稳定性尚不满足工业级要求:虽然ROS在学术界和科研领域得到了广泛应用,但在工业级应用中,其系统稳定性仍然存在一定的不足。这主要是因为ROS在设计时更多地考虑了灵活性和可扩展性,而在稳定性方面的考虑相对较少。
- 安全性上没有防护措施:ROS的安全性是另一个值得关注的问题。由于ROS是一个开源项目,缺乏统一的安全标准和防护措施,因此在实际应用中可能会面临一定的安全风险。例如,恶意攻击者可能会利用ROS的漏洞进行攻击或破坏。
- 仅支持Linux(Ubuntu):虽然ROS在Linux系统上得到了广泛的支持和应用,但这也限制了其在其他操作系统上的使用。这可能会使得一些开发者在选择ROS时面临一些挑战和限制。
- 核心机制的性能没有优化占用资源:ROS的核心机制在某些情况下可能存在性能瓶颈和资源占用过高的问题。这可能会影响系统的整体性能和效率,尤其是在资源有限的嵌入式系统或移动机器人上。
ROS2:推动ROS进入产业化与产品化时代ROS在学术界和科研领域取得了显著的成就。然而,对于工业界和产业应用而言,原始的ROS版本(即ROS1)存在一些明显的不足,阻碍了其真正的产业化与产品化进程。为了解决这些问题,ROS社区推出了ROS2,一个更为成熟、稳定和适应产业化需求的版本。1. 实时化与分布式通信
ROS2的核心改进之一是实现了实时化和分布式通信。在ROS1中,所有的节点通信都依赖于一个中心化的Master节点。这意味着如果Master节点发生故障,整个系统的通信将中断,导致所有节点功能失效。这种设计限制了ROS1在需要高可靠性和稳定性的工业环境中的应用。
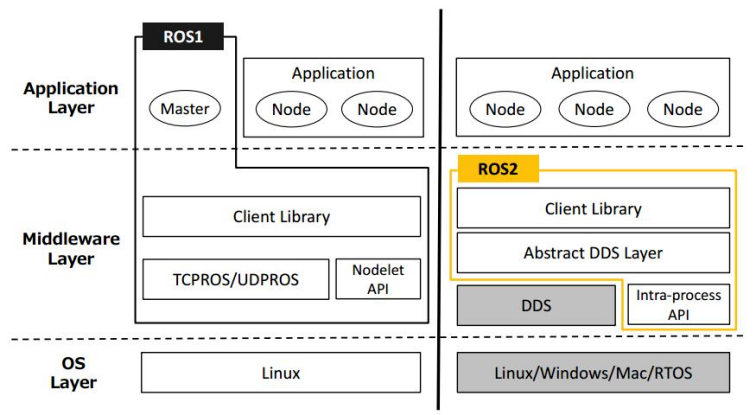
图4 ROS1和ROS2比较
为了克服这一挑战,ROS2引入了Data Distribution Service(DDS)作为其通信基础。DDS是一种广泛应用于国防、民航、工业控制等领域的实时系统数据发布/订阅标准解决方案。通过DDS,ROS2实现了去中心化的通信方式,允许节点之间进行直接通信,无需依赖于Master节点。这种分布式通信方式不仅提高了系统的可靠性和稳定性,还有助于解决多机器人系统中的通信问题。
2. 适应全平台与低性能硬件
除了实时化和分布式通信外,ROS2还致力于提高其对不同平台和硬件的适应性。在ROS1中,由于其对特定操作系统(如Ubuntu)的依赖,使得其在其他平台上的应用受到限制。而ROS2则致力于实现跨平台兼容性,支持更多的操作系统和硬件平台。此外,ROS2还针对低性能硬件(如MCU+RTOS)进行了优化。这意味着在资源有限的嵌入式系统或移动机器人上,ROS2仍然能够保持良好的性能和效率。3. 数据加密与现代编程语言支持
在数据安全方面,ROS2引入了数据加密机制,确保通信过程中的数据安全性。这一特性对于需要高度安全保护的工业应用至关重要。
同时,ROS2还支持现代编程语言,如C++和Python。这使得开发者能够使用更加高效和灵活的编程工具来开发机器人应用。
通过引入实时化、分布式通信、跨平台兼容性、低性能硬件适应性、数据加密以及现代编程语言支持等特性,ROS2为机器人技术的产业化与产品化奠定了坚实的基础。随着ROS2的不断发展和完善,我们有理由相信它将在未来的机器人领域中发挥更加重要的作用。
ROS2环境安装ZMC900E支持ROS2的开发,本地安装的系统是Ubuntu 18.04,可以安装对应的eloquent版本的ROS2。依次按以下步骤操作。1. 更换apt源
sudo cp -a /etc/apt/sources.list /etc/apt/sources.list.baksudo vi /etc/apt/sources.list
2. 替换成以下内容
deb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-backports main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-proposed main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-security main multiverse restricted universedeb http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-updates main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-backports main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-proposed main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-security main multiverse restricted universedeb-src http://mirrors.huaweicloud.com/ubuntu-ports/ bionic-updates main multiverse restricted universe
3. 安装aptitude包
sudo apt update && sudo apt install aptitude
4. 设置语言环境
sudo apt update && sudo apt install localessudo locale-gen en_US en_US.UTF-8sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8
5. 需要将 ROS2 apt 存储库添加到系统中,为此,首先使用 apt 授权GPG 密钥
sudo apt update && sudo apt install curl gnupg2 lsb-releasecurl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
6. 然后将存储库添加到源列表
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
7. 安装ROS2软件包,设置存储库后,更新apt存储库缓存,安装桌面版
sudo apt update && sudo aptitude install ros-eloquent-desktop
注:安装过程可能出现问题。
问题1:
GPG error: http://packages.ros.org/ros2/ubuntu bionic InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654
方案1:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
经过上述操作, eloquent版ROS2安装完成。
ROS2测试
在终端中,更新配置文件,运行talker:
source /opt/ros/eloquent/setup.bashros2 run demo_nodes_cpp talker
在另一个终端中,更新配置文件,运行listener:
source /opt/ros/eloquent/setup.bashros2 run demo_nodes_py listener
可以看到talker发布Publishing消息,同时listener接收并告知I heard消息, 如下图所示,说明安装成功。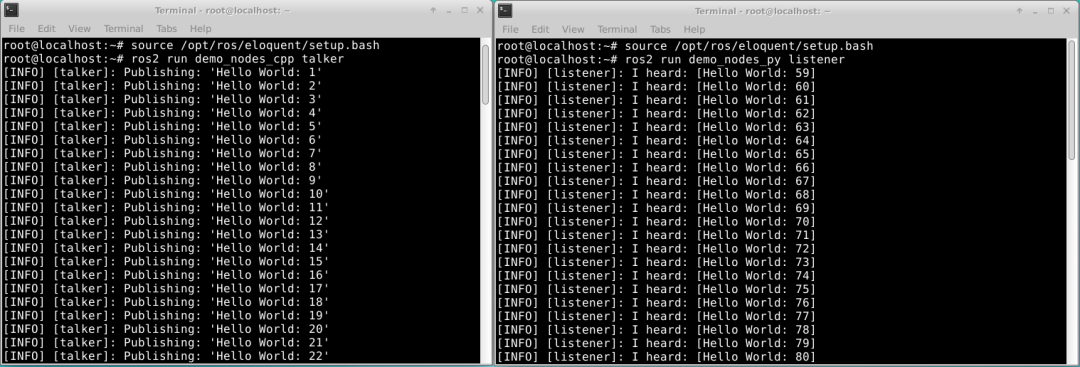
-
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?2024-03-01 5873
-
ROS2的安装与使用 精选资料推荐2021-08-30 1278
-
如何在ROS2中运行小乌龟呢2021-11-05 2464
-
教你一步步创建自己的ROS2工作空间应用2022-11-24 2290
-
Window10怎么安装ROS22023-02-22 2254
-
ROS2中自带例程测试2023-11-28 2459
-
在TogetherROS中如何安装ROS2功能包2023-12-01 3053
-
ZMC900E 国产EtherCAT主站控制器 — 电源口传导骚扰整改2024-03-07 2509
-
探索工业自动化核心:ZMC 系列 EtherCAT 主站控制器2025-08-18 2284
-
解锁PWM功能:ZMC900E主站控制器的高效应用指南2025-09-05 1061
-
深入ZMC900E:主站控制器编码器的使用与优势2025-09-11 1104
-
ZMC900E运动控制器单路EtherCAT主站125μs性能实测:硬核实力筑牢高精度控制基石2026-04-01 1717
-
基于ZMC900E的无线模块应用 — 4G篇2026-07-01 121
-
基于ZMC900E的无线模块应用-WiFi篇2026-07-02 130
-
ZMC900E如何确保嵌入式数据的可靠性2026-07-03 92
全部0条评论

快来发表一下你的评论吧 !
