

单片机串口通信控制台的构建与实现
控制/MCU
描述
1. 前言
玩过Linux的朋友, 是不是对Linux无所不能的串口Shell命令控制台羡慕不已, 要是自己做的STM32F系列低档次的MCU也有这种控制交互能力, 会给调试/维护和配置省下多少麻烦事呀, 比如启动/关闭调试或自检模式, 打印调试信息, 配置系统参数, 传输文件等等, 也有相当多的朋友凭借自己出色的编程能力可以实现这些功能, 这里提出我的这个解决方案, 以作交流.
本平台(xc_shell)具备以下性能特点:
大量主要代码, 和具体硬件无关, 移植性强,代码文件少.
只有在处理用户的输入命令时, 才占用CPU资源, 且代码可裁剪到1KB SRAM和4KB Flash;
用户可以非常灵活的添加按模板编写的命令脚本文件, 自定义扩张能力强.
支持操作系统和非操作系统两种场景应用.
支持Ymodem文件传输协议
支持将Flash的扇区开辟为参数区, 可实现本地/远程升级。
实用Led灯信号管理, 可将65535虚拟信号灯选择输出到1个实体LED灯上, 调试时序和状态非常有用
拥有基础的LED管理, 调试模式设置, 命令帮助指令, 复位指令等基础功能
功能越多设计会越复杂, 为了解释清楚代码, 先向大家解释一下以上功能的基础实现原理, 并提供一个最小的的源码工程。
2. xc_shell平台介绍
2.1 如何实现硬件无关
类比Linux会发现, 设备的硬件接口往往会被虚拟成一个文件(驱动), 而Linux内核完全与硬件系统无任何字节关联, 不同平台驱动不同而已, 故而本xc_shell的串口驱动也采用了相似的思路:
1) 串口驱动用一个结构体描述, 这样只需在xc_shell.c中用指针指向这个TTYx_HANDLE结构体对象就可以将串口(tty)硬件与内核联系在一起, 聪明的朋友可能会想到, 假如我将带网络的开发板按此结构体,虚拟一个TTY对象, 岂不是就可以实现一个网络远程控制台了! 这点确实是可以的!
2) 当然诸如多TTY串口实现接口互换等, 都是一个指针和step2中的注入回调处理交换的问题。
3)用户在使用api_TxdFrame或api_TxdByte时”bsp_ttyX.c“,会驱动具体MCU的串口将数据发送出去, 收到一帧数据后,若用户设置了inj_RcvFrame回调处理方法,则会在中断中执行用户的回调处理。
/*---------------------*
* 指正函数定义
*----------------------*/
typedef void (*pvFunDummy)(void);
//输入整行,输出逻辑
typedef void (*pvFunVoid) (void);
typedef void (*pvFunBool) (bool bVal);
typedef void (*pvFunChar) (uint8_t cVal);
typedef void (*pvFunShort)(uint16_t sVal);
typedef void (*pvFunWord) (uint32_t wVal);
//输入整行,输出逻辑
typedef bool (*pbFunVoid) (void);
typedef bool (*pbFunBool) (bool bVal);
typedef bool (*pbFunChar) (uint8_t cVal);
typedef bool (*pbFunShort)(uint16_t sVal);
typedef bool (*pbFunWord) (uint32_t wVal);
//输入整形指针,输出逻辑
typedef bool (*pbFun_pVoid) (void * pVoid);
typedef bool (*pbFun_pChar) (uint8_t * pStr);
typedef bool (*pbFun_pShort)(uint16_t * pShor);
typedef bool (*pbFun_pWord) (uint32_t * pWord);
//输入数据帧,输出逻辑
typedef bool (*pbFun_Buffx)(void * pcBuff, uint16_t len );
typedef bool (*pbFun_Bytex)(uint8_t * pcByte, uint16_t len );
/*---------------------*
* TTYx 句柄结构
*----------------------*/
typedef struct TTYx_HANDLE_STRUCT
{
const char * const name; //驱动器名
const uint16_t rxSize; //接收大小
const uint16_t txSize; //发送大小
//------------------------------------------------------
//step1: 用户可用API
const pvFunWord init; //初始化.
const pbFun_Bytex api_TxdFrame; //发送数据帧. (发送帧)
const pbFunChar api_TxdByte; //发送数据字节
//------------------------------------------------------
//step2: 注入回调函数
pbFun_Bytex inj_RcvFrame; //(ISR)接收数据帧. (接收帧)
pvFunDummy inj_TxdReady; //(ISR)发送完毕回调
//------------------------------------------------------
//step3: 接收回调函数
struct TTYx_HANDLE_STRUCT * pvNext; //连接到下一个指令
}TTYx_HANDLE;
可注入的命令脚本(CLI)实现
命令CLI也是一个结构体对象:
/*---------------------*
* CLI指令
*----------------------*/
typedef struct
{
const char * const pcCmdStr; //指令字符串(只能为小写字母)
const char * const pcHelpStr; //指令描述,必须以:"
结束". 比如:"help: Returns a list
".
const pFunHook pxCmdHook; //指向回调函数的指针,处理成功返回真否者返回0;
uint8_t ucExpParam; //指令期望的参数个数
const MEDIA_HANDLE *phStorage; //指向存储介质,没有的话填充NULL
}Cmd_Typedef_t;
各位朋友可能会使用到非常多的自定义CLI命令, 格式诸如这个网卡的命令:
const Cmd_Typedef_t CLI_WizMsg=
{
//识别关键字
.pcCmdStr = "wiz",
//帮助内容
.pcHelpStr =
"[WIZ contorls]
"
" wiz help
"
" wiz rd info
"
" wiz reset
"
" wiz wr ip ...
"
" wiz wr mask ...
"
" wiz wr way ...
"
" wiz wr mac -----
"
" wiz wr port
"
" wiz wr sip ...
"
" wiz wr cip ...
"
" wiz load default
"
"[WIZ Test mode]
"
" wiz loop open
"
" wiz loop close
"
"
",
//处理函数
.pxCmdHook = &Shell_WIZ_Service, //见实体函数
//附带数据
.ucExpParam = 0,
#ifdef SHELL_USE_YMODEM
//存储介质
.phStorage = NULL,
#endif
};
/*---------------------*
* CLI 链表节
*----------------------*/
Cmd_List_t WizList = { &CLI_WizMsg, NULL,}; //Shell指令的头
如配置IP地址输入“wiz wr ip 192.168.1.250 ”则可以了
3. 环境准备
3.1 硬件开发环境
STM32F103系列开发板一块, 带USART1接口。
USB转串口线一根。
3.2 软件开发环境
MDK4.72或以上
SecureCRT串口超级终端
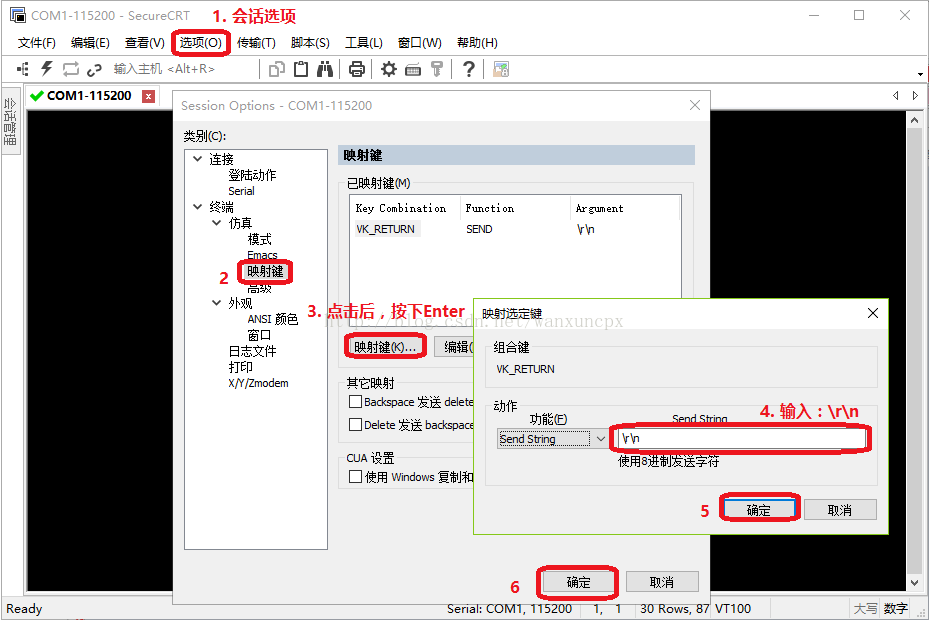
3.3 软件配置
在xc_shell使用“/r/n”作为命令的结束符, 而SecureCRT按下Enter不是输入“/r/n”故而需要按下图设置:此外在《终端》/仿真/高级中选取【本地回显】
4. 代码介绍
4.1 目录结构
□ XC_SHELL ├──┬── BSP_LIB BSP库,硬件相关驱动代买 │ ├──── bsp_ledx.c 基础LED驱动 │ └──── bsp_tty0.c 调试串口驱动 │ ├──┬──MDK-ARM 工程文件 │ └──── Project.uvproj │ ├──┬──SHELL_CFG SHELL配置头文件 │ └──── user_eval.h │ ├──┬──SHELL_CORE SHELL内核文件 │ ├──── xc_shell.c SHELL内核文件 │ ├──── xc_ymodem.c Ymodem传输协议(默认关闭,在xc_shell.h中启动) │ ├──── xc_iap.c Flash的IAP操作,需要bsp_flash.c驱动支持 │ └──── shell_iap.c shell的用户脚本模板 │ ├──┬──SHELL_INC SHELL头文件 │ ├──── bsp_type.h 驱动结构定义 │ ├──── xc_shell.h SHELL头文件 │ └──── xconfig.h 硬件无关配置文件 │ ├──┬──STM32F10x_StdPeriph_Lib_V3.5.0 STM32的标准外设库 │ └──── ...... │ └──┬──USER 用户文件 ├─ ..... └──── main.c main文件
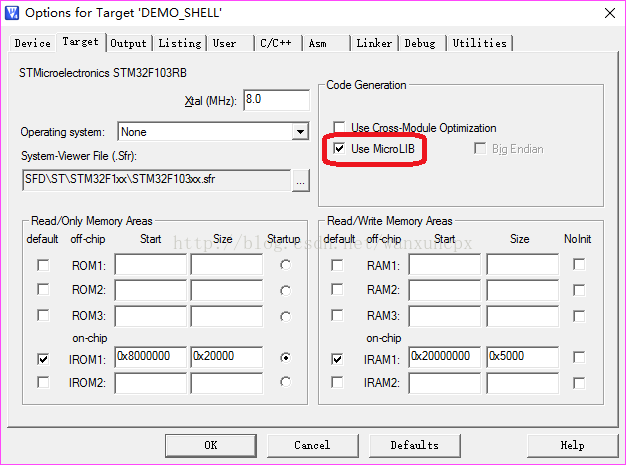
4.2 工程设置要点
1) 设置使用微库:
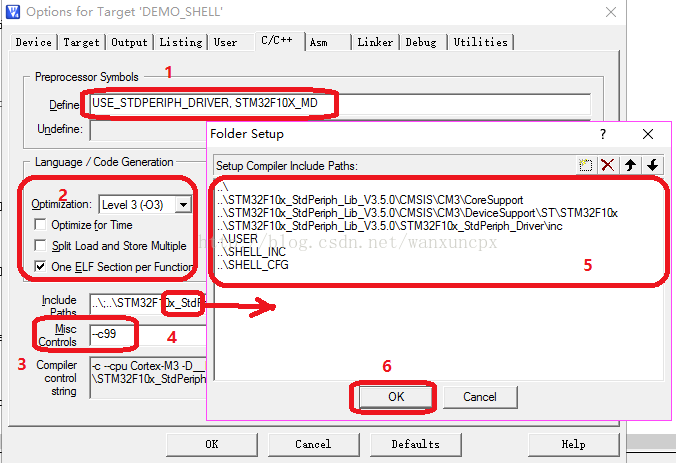
2)配置包含和路径,注意使用了“--c99”标准,如图
3) 编译工程,无错误警告后烧写程序到开发板运行。
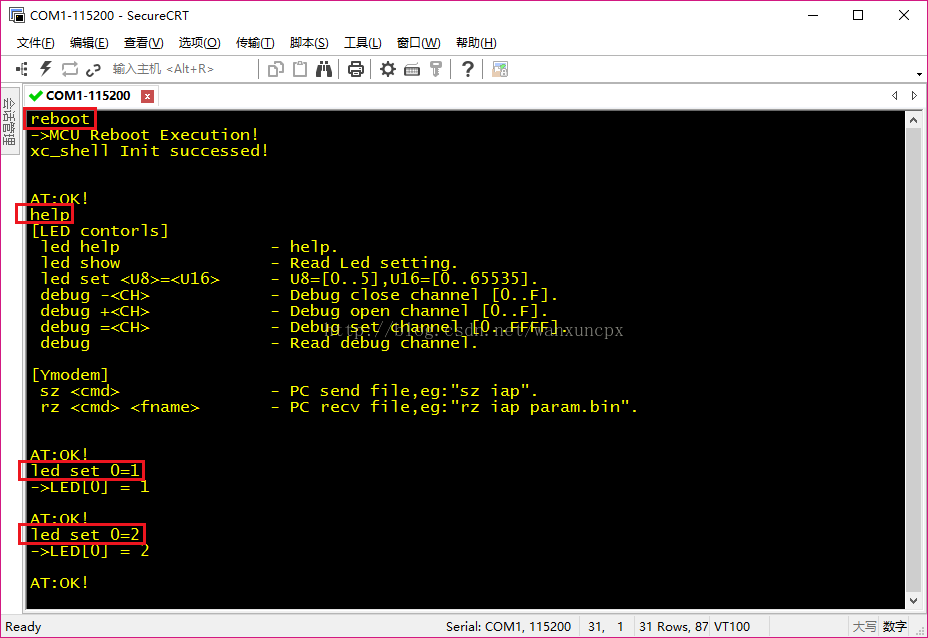
4.3 最终效果
按图输入一下指令,SHELL平台会回复相关信息。其中输入“led set 0=1”会将信号1分配到物理LED0上;输入“led set 0=2”会将信号2分配到物理LED0上。这样用户编写程序代码时相当于拥有了超级多的LED信号可用,调试时序非常有用。
5. 添加自己的指令脚本
5.1 源代码示例
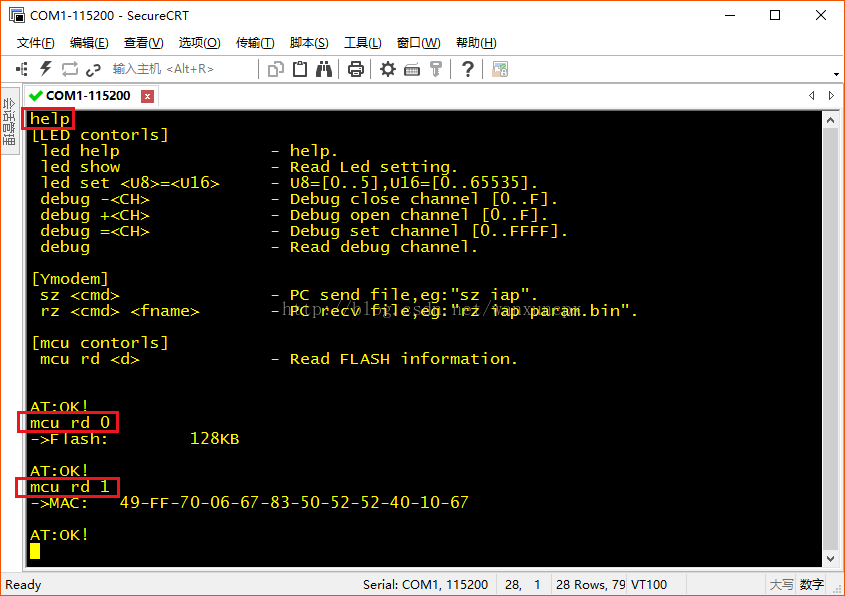
假设我要编写一个自己的指令脚本, 来读取MCU的关键信息,关键字为mcu, 文件命名为shell_mcu.c;当输入“mcu rd 0”时显示MCU的FLASH大小,输入“mcu rd 1”时读取MCU的唯一ID信息。shell_mcu.c源代码:
/*********************************Copyright (c)*********************************
**
** FIVE工作组
**
**---------------------------------File Info------------------------------------
** File Name: shell_mcu.c
** Last modified Date: 2017/9/17 1557
** Last Version: V1.0
** Description: shell测试
**
**------------------------------------------------------------------------------
** Created By: wanxuncpx
** Created date: 2017/9/17 1508
** Version: V1.0
** Descriptions: none
**------------------------------------------------------------------------------
** HW_CMU: STM32F103
** Libraries: STM32F10x_StdPeriph_Lib_V3.5.0
** version V3.5
*******************************************************************************/
/******************************************************************************
更新说明:
******************************************************************************/
/******************************************************************************
********************************* 编 译 控 制 ********************************
******************************************************************************/
#define MCU_SHELL //注释掉时屏蔽iap shell功能
#include "xc_shell.h" //Shell支持文件,含bool,uint8_t..以及串口数据收发操作
/******************************************************************************
********************************* 文件引用部分 ********************************
******************************************************************************/
/*---------------------*
* 模块驱动引用
*----------------------*/
//#include "net_w5500.h"
#ifdef MCU_SHELL
/******************************************************************************
********************************** Shell实例 **********************************
******************************************************************************/
/*---------------------*
* CLI指令服务
*----------------------*/
extern bool Shell_MCU_Service(void * pcBuff, uint16_t len );
/*---------------------*
* CLI 结构
*----------------------*/
const Cmd_Typedef_t CLI_McuMsg=
{
//识别关键字
"mcu",
//帮助内容
"[mcu contorls]
"
" mcu rd - Read FLASH information.
"
"
",
//处理函数
&Shell_MCU_Service,
//附带数据
0,
#ifdef SHELL_USE_YMODEM
//存储介质
NULL,
#endif
};
/*---------------------*
* CLI链表节(输出)
*----------------------*/
Cmd_List_t McuList = {&CLI_McuMsg ,NULL}; //IAP指令链表
/******************************************************************************
********************************* 函 数 声 明 *********************************
******************************************************************************/
/******************************************************************************
/ 函数功能:STM32F103控制函数
/ 修改日期:2015/7/14 2002
/ 输入参数:none
/ 输出参数:none
/ 使用说明:需要执行约10s
******************************************************************************/
static bool FLASH_ioctl(uint8_t cmd,void * param)
{
#define UID_ADDR 0x1FFFF7E0 //闪存容量寄存器,值对应KB单位
#define MAC_ADDR 0x1FFFF7E8 //MCU的唯一ID号,共12个字节
#define UID_SIZE 2 //UID的字节数
#define MAC_SIZE 12 //MAC的字节数
//step1: 检查参数
if(!param)return false;
//step2: 处理数据
switch(cmd){
case 0 : { //获取FLASH的的UID
uint16_t * ptDst = (uint16_t *)((uint32_t)param+1);
*ptDst = *(uint16_t *)UID_ADDR;
*(uint8_t *)param = UID_SIZE;
return true;
}
case 1 : { //获取芯片的MAC地址
uint32_t * ptDst = (uint32_t *)((uint32_t)param+1);
uint32_t * ptSrc = (uint32_t *)MAC_ADDR;
*ptDst++ = *ptSrc++;
*ptDst++ = *ptSrc++;
*ptDst++ = *ptSrc++;
*(uint8_t *)param = MAC_SIZE;
return true;
}
default:return false;
}
}
/******************************************************************************
/ 函数功能:文件系统Shel指令处理
/ 修改日期:2013/9/10 1915
/ 输入参数:输入当前的程序版本
/ 输出参数:none
/ 使用说明:none
******************************************************************************/
bool Shell_MCU_Service(void * pcBuff, uint16_t len )
{
uint8_t *ptRxd; //用于接收指令处理
int i;
uint16_t retval;
uint8_t buff[32];
//处理指令
//--------------------------------------------------------------------------
ptRxd = (uint8_t *)pcBuff;
if(StrComp(ptRxd,"rd ")) //读取FLASH信息
{
int wval;
if(1 != sscanf((void *)ptRxd,"%*s%d",&wval) )return false;
if( wval>2 )return false;
if(0==wval) {
FLASH_ioctl(0,buff);
retval = *(uint16_t *)(buff+1) ;
printf("->Flash: %dKB
",retval);
return true;
}
else if(1==wval) {
FLASH_ioctl(1,buff);
printf("->MAC: ");
for(i=0; i
5.2 实现步骤
1) 将该文件添加到工程下。
2) 在main.c中用extern 引用McuList,源代码为:
/*---------------------*
* Shell指令链表
*----------------------*/
extern Cmd_List_t McuList;
3)在main.c初始化时添加:
//----------------------------------------------------------
//step1: shell初始化
shell_Init(115200,ledx_cfg); //初始化shell接口
CLI_AddCmd(&McuList); //添加模块指令到链表
4)编译工程文件。
5)下载到开发板运行即可在终端下看到新支持的CLI指令:
审核编辑:黄飞
-
单片机串口通信的接收与发送2023-12-20 5826
-
用单片机串口和modbus poll 进行通信2021-12-28 1533
-
单片机串口通信原理和控制程序2021-12-17 1048
-
Java实现与51单片机串口通信 Serie Library2021-11-23 1088
-
51单片机串口通信2021-11-18 1331
-
串口通信详解(51单片机)2021-11-12 1863
-
如何使用MSP430单片机进行多机串口通信的设计2019-03-07 3014
-
如何使用51单片机实现串口通信2018-11-21 31373
-
什么是单片机的串口通信?2018-07-25 62469
-
基于单片机的串口通信设计2018-01-19 1074
-
DSP与单片机串口通信的设计与实现2017-10-20 1241
-
激光测距机显示控制台的设计2009-09-15 926
全部0条评论

快来发表一下你的评论吧 !
