

SPI协议详解(以ADS1118为例)
描述
最近要写一个协议,所以再复习一次SPI。(存草稿太久了,再不发就忘了)
一开始先分析了SPI的协议特点,使用ADS1118这个器件作为承载物进行分析,后面用逻辑分析仪从位到字节进行解码,最后使用TI给的demo移植到STM32平台。
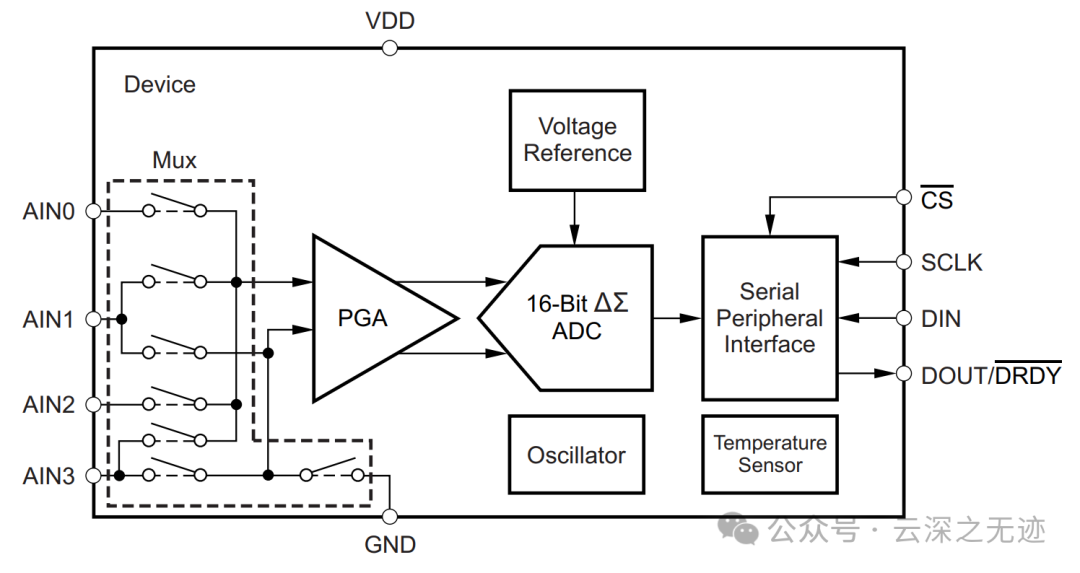
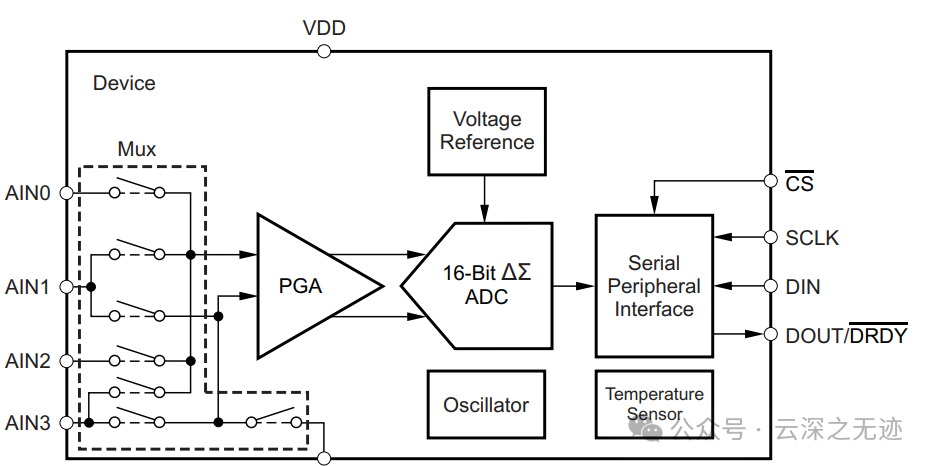
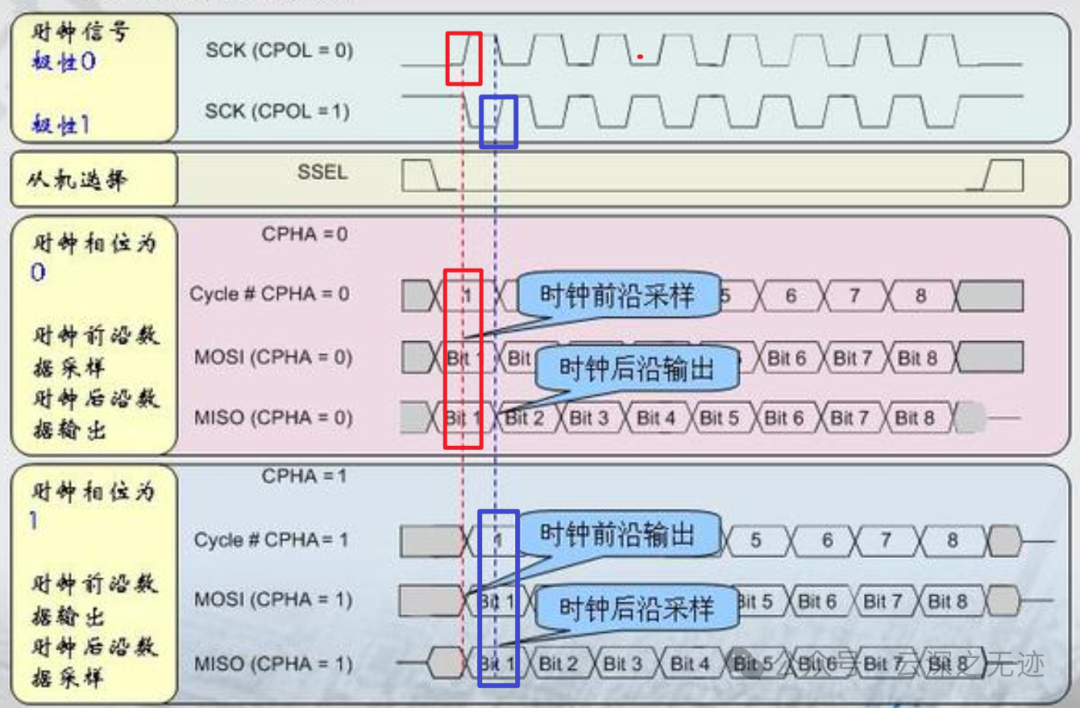
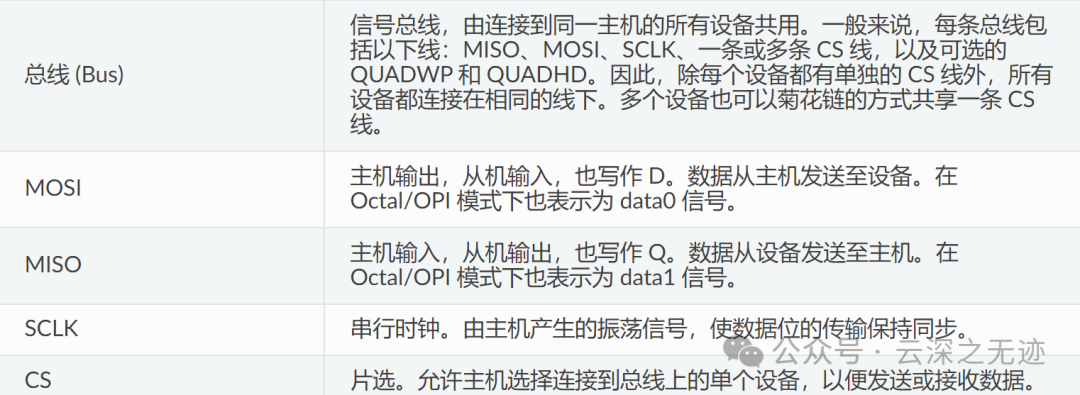
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
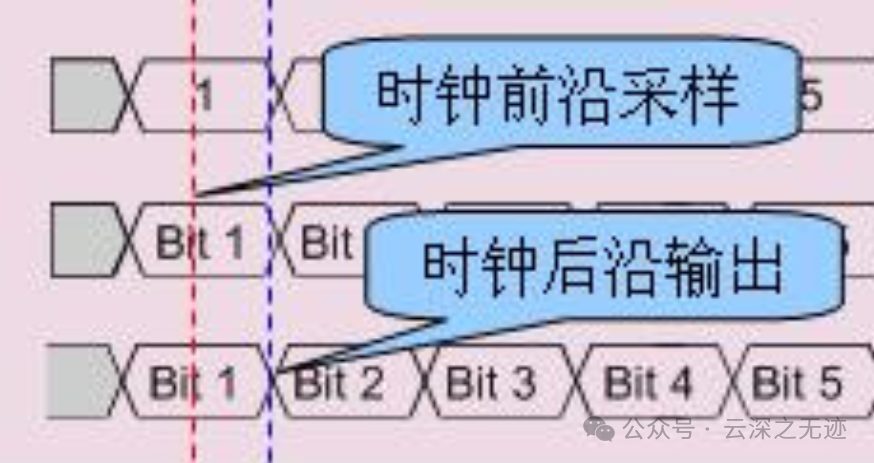
上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,sdo上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,sdi上的电平将被接收到主设备的寄存器中。 各家的名字可能不一样,反正你就看传输方向就行。
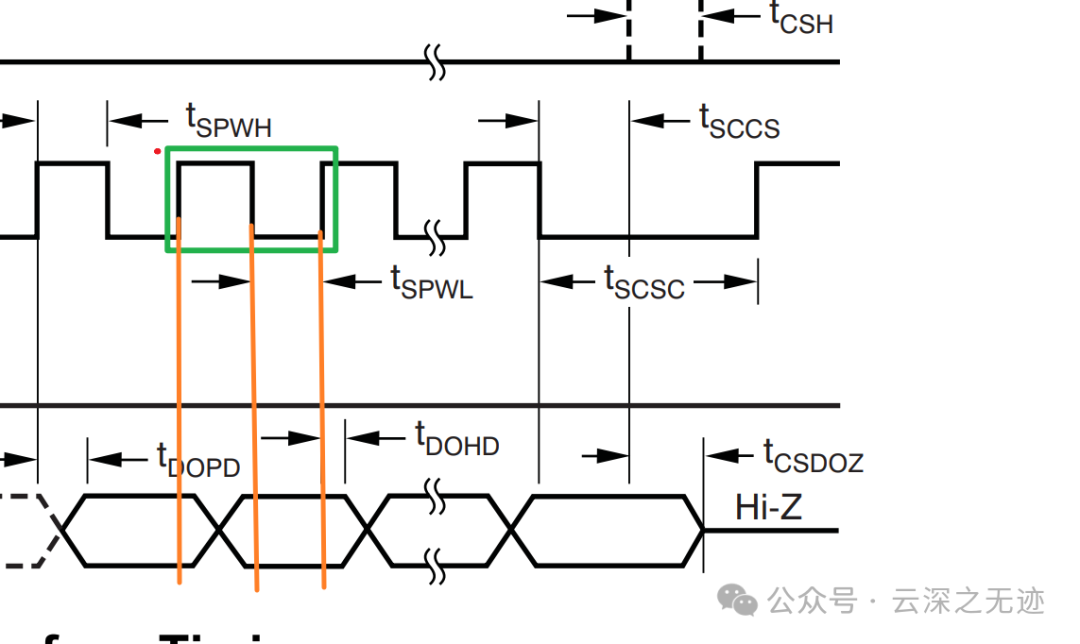
这个是时序图,因为是双向的传输,在主机发给从机这段时间,从机也是发数据的,但是相当于乱发无意义的:
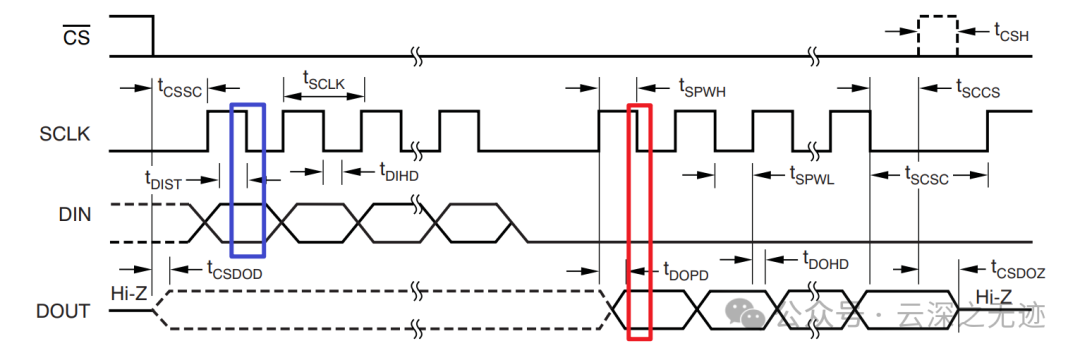
另外:密封的菱形部分,注意要密封,表示数据有效,Valid Data这个词也显示了这点。
关于时间的标注,这也是个十分重要的信息,这些时间的标注表明了某些状态所要维持的最短或最长时间。
因为器件的工作速度也是有限的,一般都跟不上主控芯片的速度,所以它们直接之间要有时序配合。
外部12MHz晶振,指令周期就是一个时钟周期为(1/12MHz)us,所以至少确定了它执行一条指令的时间是us级别的。我们看到,以上给的时间参数全部是ns级别的,所以即便我们在程序里不加延时程序
10的-3次方
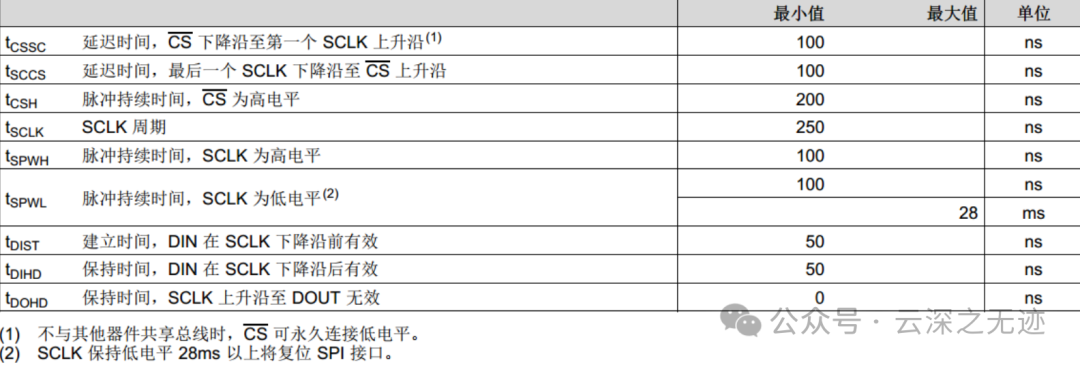
时序时间
专有的时钟引脚上面是有施密特输入的

这个名字好,DIN,然后数据锁存在下降沿上:

GPIO开启了引脚的弱上拉电阻:

上升沿移出,下降沿准备:
这个是输出的一个时钟周期
这个样子的意思是,数据有高有低,靠后的线是数据输出,前面是数据准备。或者是被锁定

不确定是不是所有的这样。和上面的分析差不多
看一个连续输出

在时序上面
给MCU的数据中,一个大的时钟周期由32个小周期组成,两个字节来说明转换的结果,也就是本身的数据,MSB在前。后面两个是寄存器的回读,这里我理解是把输出的控制命令又回流一次。
2^16,两个16位
DIN是MCU给器件的信息,MSB+LSB发一次,剩下二分之一如果你不变化,就可以让这个DIN的引脚在后一个周期里面一直低或者高都可以。

你看嘛,就是这样

还有16为输出模式,可以交替的拉低CS来输出
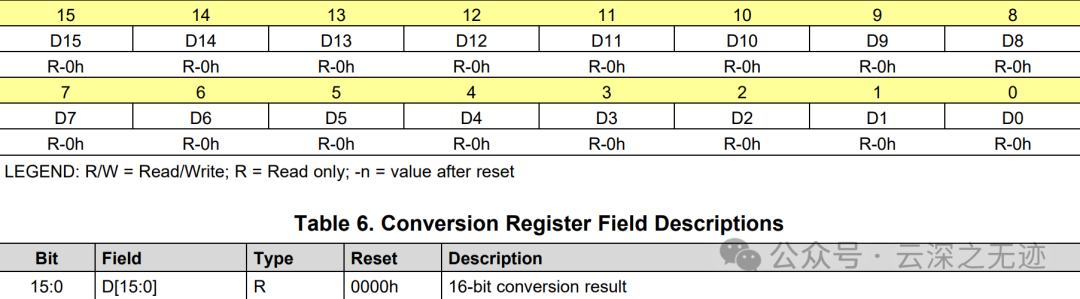
这个是输出16位值的寄存器的样子,0~15,上面每一位都是一个0或者1,一次16位。

这个是配置的寄存器,从0开始写,一直配好到15,组成一个16位的序列,发送。
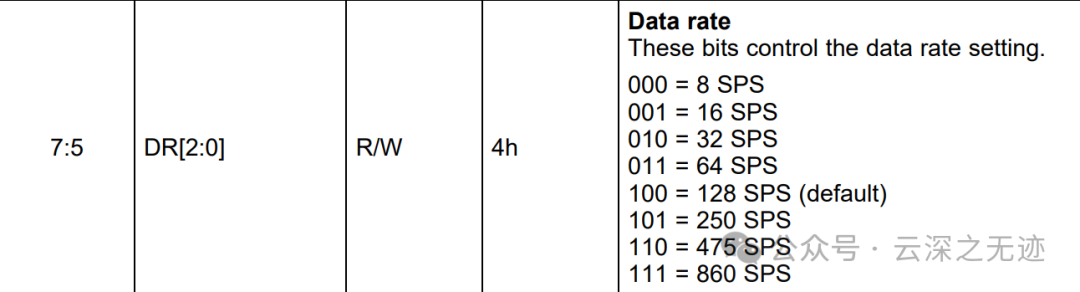
数据手册里面的写法是倒着来,先15,说这个寄存器的位置在15,名字叫SS,可以读可以写,重启之后是0h,描述是断电的时候设置一次,在转换过程中换不了。

这个是3位,8种情况,对应个个采集方式:
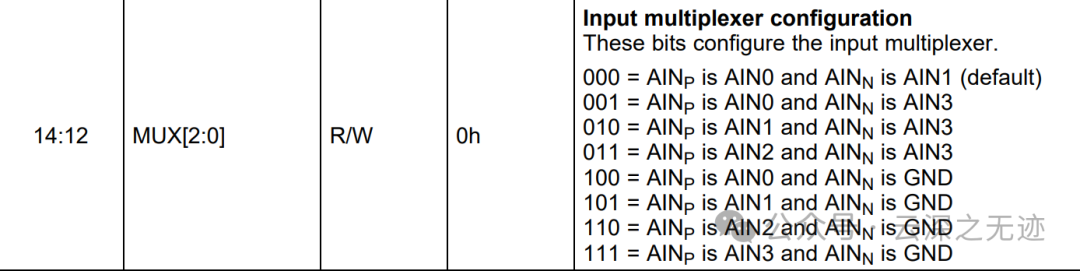
如果对地的话,那就是差分
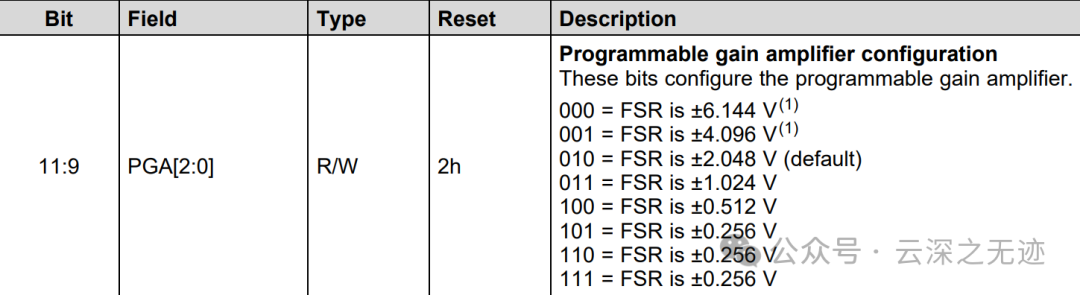
增益放大器:
速率:
连续还是单发:

默认是单发
找了找就这个图出现的次数最多。
OK
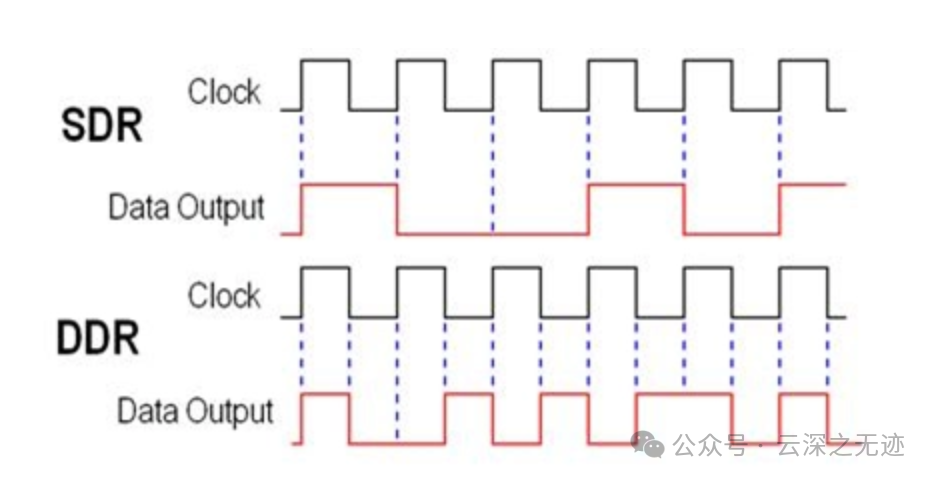
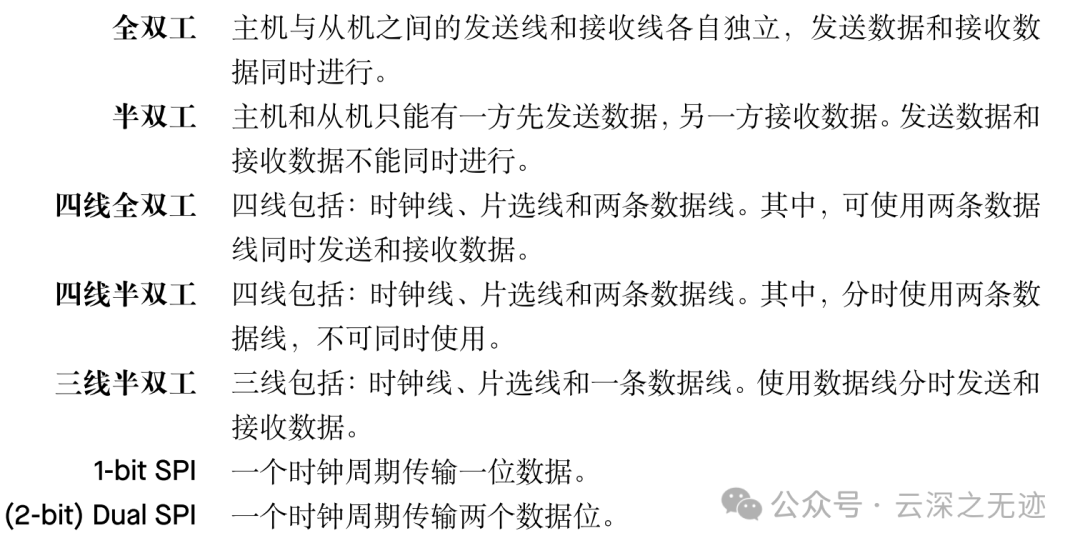
扩展SPI还增加了SDR(Single Data Rate)和DDR(Double Data Rate)两种模式。在标准SPI 协议的SDR 模式下,只在SCK 的单边沿进行数据传输,即一个SCK 时钟只传输一位数据;而在DDR 模式下,会在SCK 的上升沿和下降沿都进行数据传输,即一个SCK 时钟能传输两位数据,传输速率提高一倍。
就是这样
没问题,可以看到时序图内在CLK的上下沿,数据线上的电平确实是稳定的,可以读取。
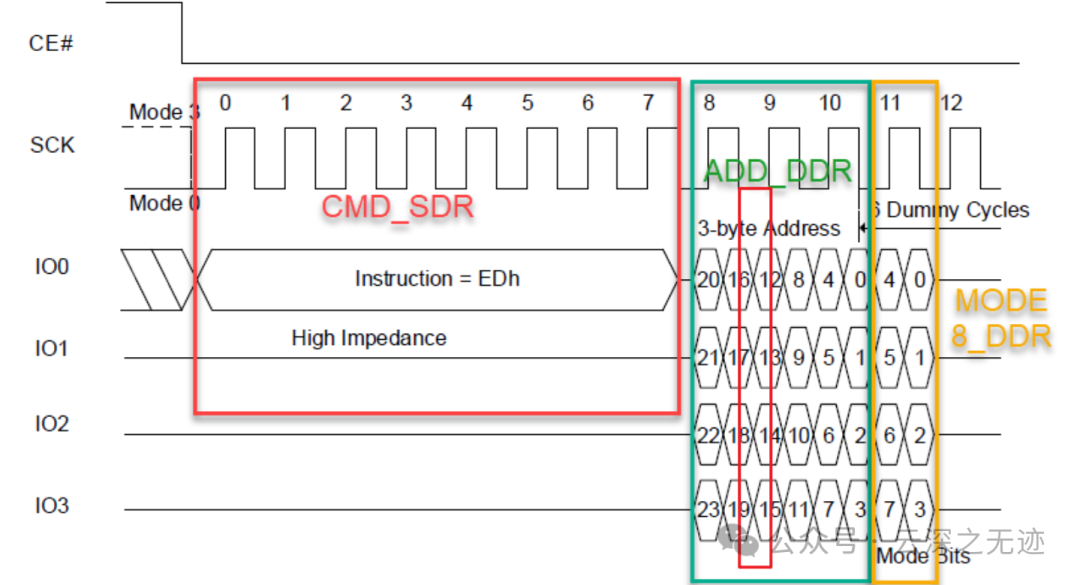
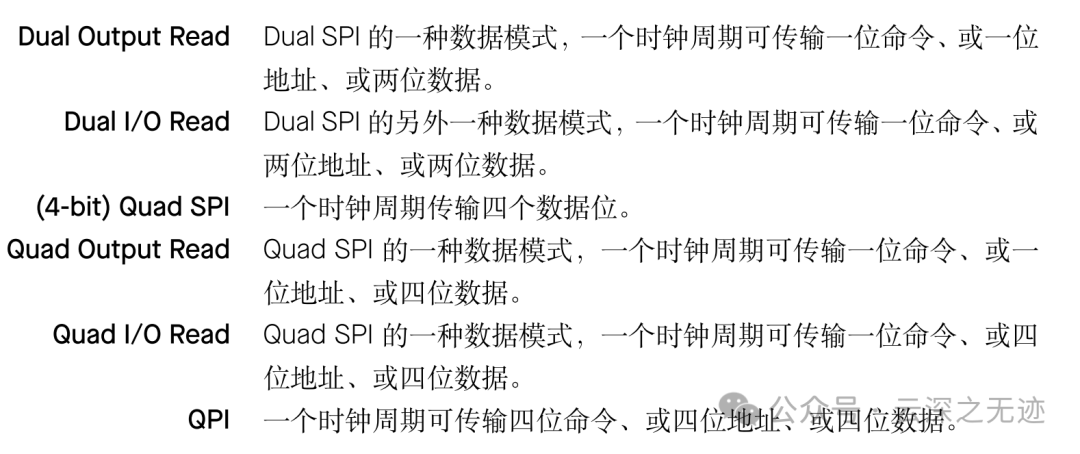
1. 2-bit Dual SPI模式
2-bit Dual SPI模式,也称为Dual SPI模式,是标准SPI的一个变体,它使用两条数据线(通常是MOSI和MISO)同时传输数据。在此模式下,数据在时钟信号的上升沿和下降沿同时被发送和接收,使得数据吞吐量相比单线SPI翻倍。
它只是针对SPI Flash而言,不是针对所有SPI外设。对于SPI Flash,全双工并不常用,因此扩展了mosi和miso的用法,让它们工作在半双工,用以加倍数据传输。也 就是对于Dual SPI Flash,可以发送一个命令字节进入dual mode,这样mosi变成SIO0(serial io 0),mosi变成SIO1(serial io 1),这样一个时钟周期内就能传输2个bit数据,加倍了数据传输。
数据线:使用MOSI和MISO同时传输数据。
数据速率:相比于标准SPI,数据传输速率翻倍,因为它同时使用两条线传输数据。
使用场景:适用于需要比标准SPI更高数据传输率但又不需要四线Quad SPI的场景。
2. DDR SPI模式
DDR SPI(双数据率SPI)模式在每个时钟周期的上升沿和下降沿都进行数据传输。这意味着在每个时钟脉冲上,都可以发送或接收数据,从而有效地加倍了数据传输速率。这种模式通常用于高速数据采集系统中。
数据线:通常使用一条或多条数据线,但每个时钟周期传输两次数据。
数据速率:数据速率是标准SPI的两倍,因为它在时钟的上升沿和下降沿都传输数据。
使用场景:适合高性能需求的应用,如高速数据采集或高分辨率视频传输。
区别 数据传输方式:Dual SPI利用两条数据线在时钟的每个边沿传输数据;而DDR SPI可能只使用一条数据线,但在每个时钟的上升沿和下降沿都传输数据。
复杂性:DDR SPI通常在实现上更复杂,因为它要求在时钟的每个边缘精确控制数据的采样和输出,这对时钟同步提出了更高的要求。
效率:尽管两者都提高了数据传输速率,但在具体实现和系统兼容性方面,它们各有优势和局限。
如果你的设计对时钟同步的要求极高,可能会更倾向于使用Dual SPI而不是DDR SPI,因为后者需要更精确的控制和可能导致的时钟偏差问题。
相反,如果需要极高的数据传输效率,DDR SPI可能是更好的选择。

HI-Z是什么?
补充:
Hi-Z是数字电路常见术语,指的是电路的一种输出状态,既不是高电平也不是低电平,如果高阻态再输入下一级电路的话,对下级电路无任何影响,和没接一样,如果用万用表测的话有可能是高电平也有可能是低电平,随它后面接的东西定。高阻态: 高阻态的实质电路分析时高阻态可做开路理解。
模式1:

上升沿改变,下降沿读取。
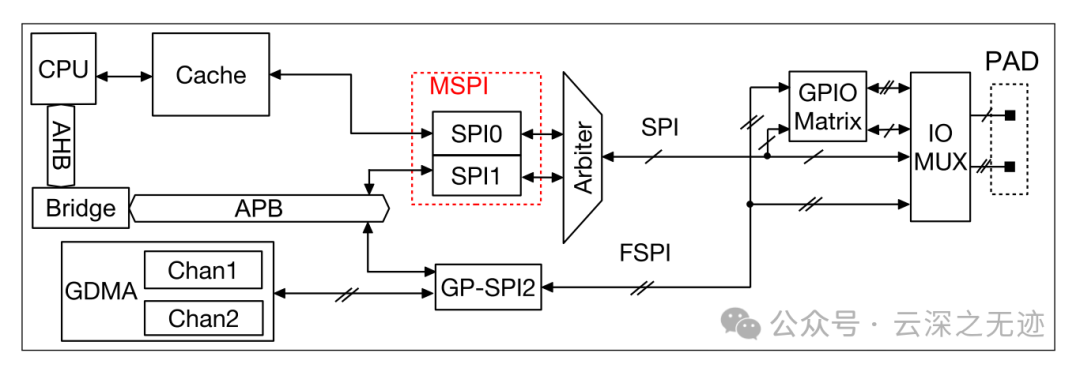
手边还有一个ESP32-C3的单片机,这个是它的数据手册,有三个SPI,或者是一个SPI配六个CS线。
外部焊盘,通过MUX,多路转换到接口上面,可以走DMA或者Cache到CPU,等等,之后再说。
这个就更专业啦
SPI 主机驱动允许总线上连接多个设备(共享单个 ESP32-C3 SPI 外设)。每个设备仅由一个任务访问时,驱动程序线程安全。反之,若多个任务尝试访问同一 SPI 设备,则驱动程序 非线程安全。
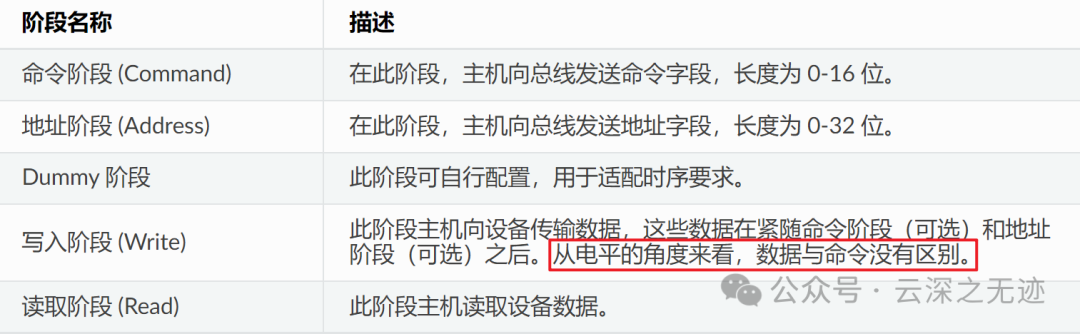
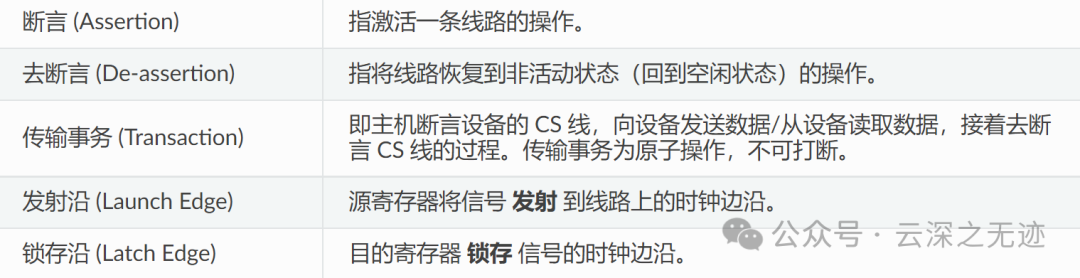
所有的SPI协议都可以分成这样的步骤。
当传输事务数据等于或小于 32 位时,为数据分配一个缓冲区将是次优的选择。
SPI 主机逐字节地将数据读入和写入内存。默认情况下,数据优先以最高有效位 (MSB) 发送,极少数情况下会优先使用最低有效位 (LSB)。如果需要发送一个小于 8 位的值,这些位应以 MSB 优先的方式写入内存。
例如,如果需要发送 0b00010,则应将其写成 uint8_t 变量,读取长度设置为 5 位。此时,设备仍然会收到 8 位数据,并另有 3 个“随机”位,所以读取过程必须准确。
传输速度主要有以下三个限制因素:
传输事务间隔时间
SPI 时钟频率
缓存缺失的 SPI 函数,包括回调
影响大传输事务传输速度的主要参数是时钟频率。而多个小传输事务的传输速度主要由传输事务间隔时长决定。
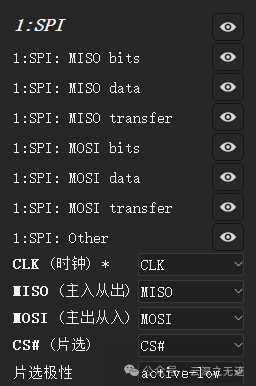
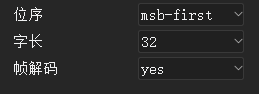
在捕捉的时候可以对 SPI 进行详细设置
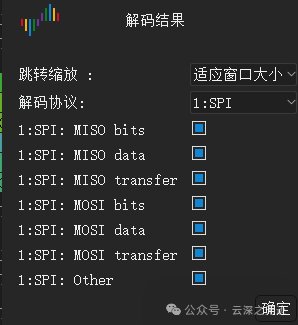
三个解码层级的设置
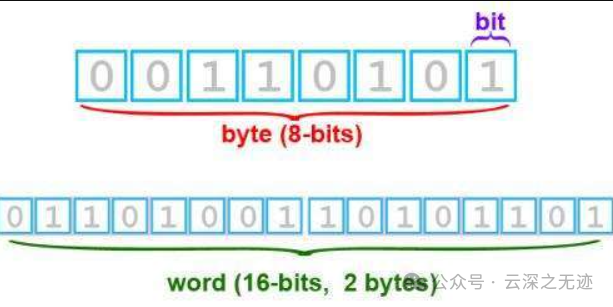
这里的解码有几个层级,首先是bit级别,就是0,1,接着是转换,就是0,1拼成别的进制数据。还有就是转换成数据。

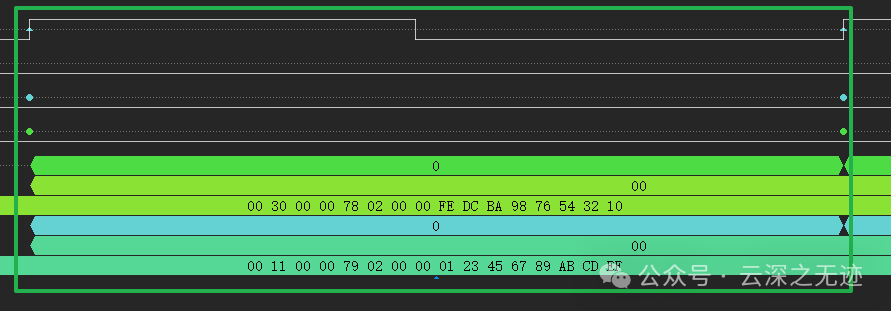
全是0
16进制的我喜欢使用

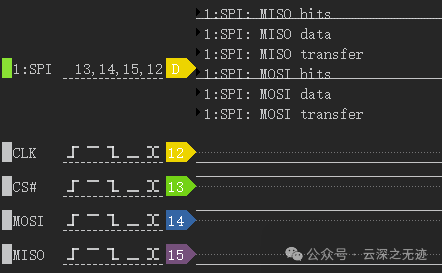
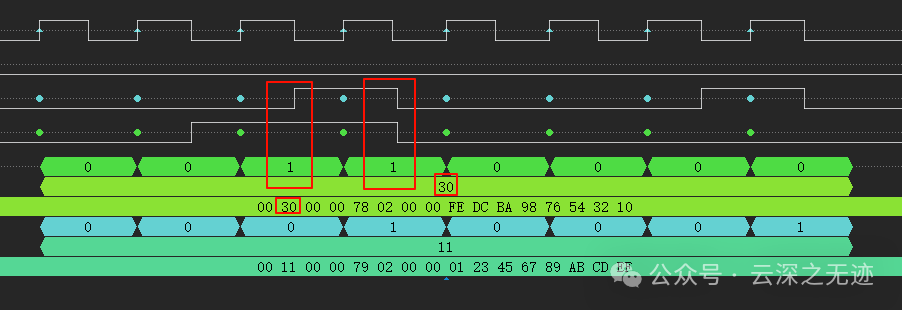
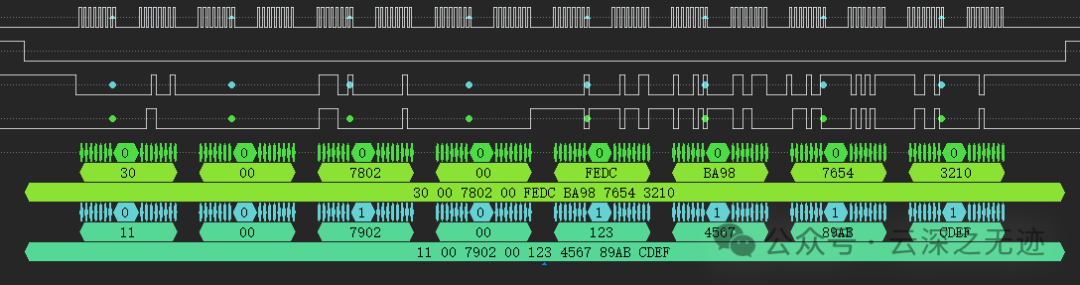
可以看到是一个不断分组,组装的过程
先看一个时钟的变化
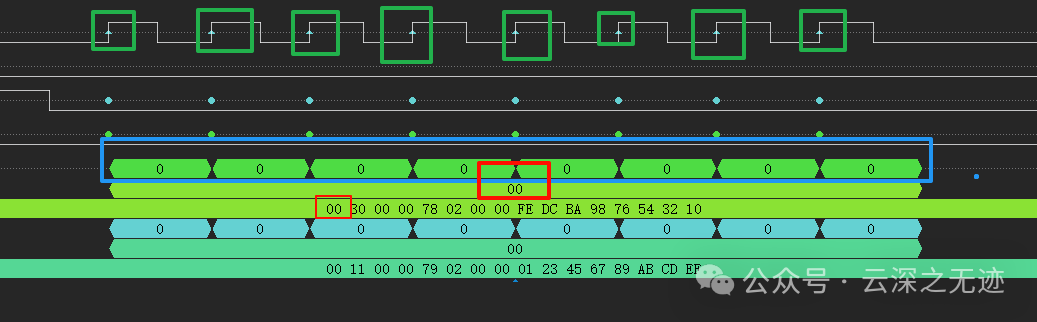
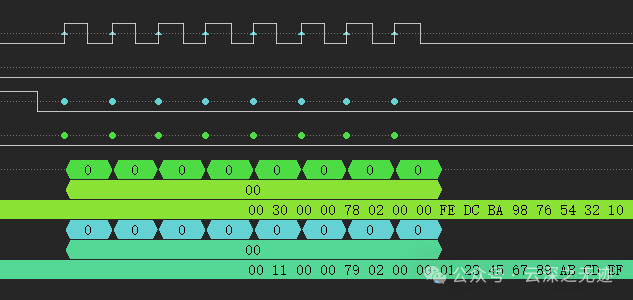
有八个上升沿,也就是8个0,也就是下面的00.是转换的层级,8个字节是一位-00.
下面就是两个字节变成了一word-16bit
第二个字节

大概就是这样的解码啦

这就是解码出来的第一个数据
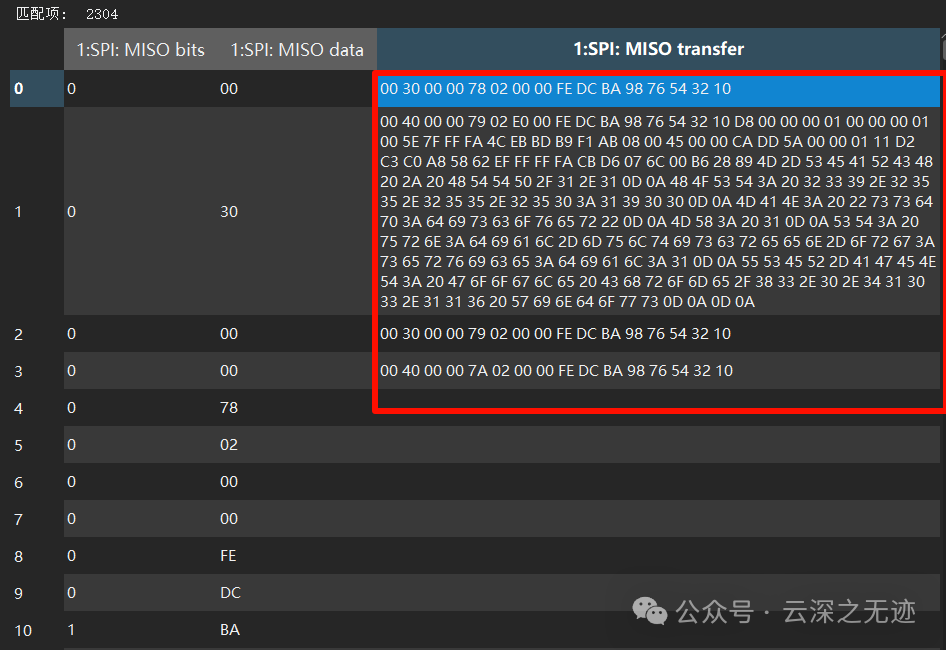
前面是bit位,下一个是字节位,下一个是word位
按照16字节来解码
因为可以自由的传输任意的字节数据,也可以在这里自己定义这个事情
这里就开始移植,看这个TI的意思是随便整,推荐自己实现SPI的接口:
下载最后一个
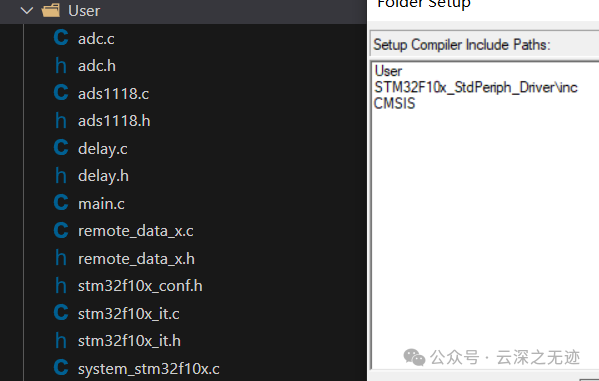
这里先说一下头文件如何加
我们的工作是要在代码里面实现STM32的SPI接口移植,然后在线测量所有的参数来更加详细的学习SPI。
先看懂给的代码,明白要干啥:
这些是TI的库
NSS管脚及我们熟知的片选信号,作为主设备NSS管脚为高电平,从设备NSS管脚为低电平。
当NSS管脚为低电平时,该spi设备被选中,可以和主设备进行通信。在stm32中,每个spi控制器的NSS信号引脚都具有两种功能,即输入和输出。所谓的输入就是NSS管脚的信号给自己。所谓的输出就是将NSS的信号送出去,给从机。
对于NSS的输入,又分为软件输入和硬件输入。
软件输入: NSS分为内部管脚和外部管脚,通过设置spi_cr1寄存器的ssm位和ssi位都为1可以设置NSS管脚为软件输入模式且内部管脚提供的电平为高电平,其中SSM位为使能软件输入位。SSI位为设置内部管脚电平位。同理通过设置SSM和SSI位1和0则此时的NSS管脚为软件输入模式但内部管脚提供的电平为0。若从设备是一个其他的带有spi接口的芯片,并不能选择NSS管脚的方式,则可以有两种办法,一种是将NSS管脚直接接低电平。另一种就是通过主设备的任何一个gpio口去输出低电平选中从设备。
硬件输入: 主机接高电平,从机接低电平。


这样
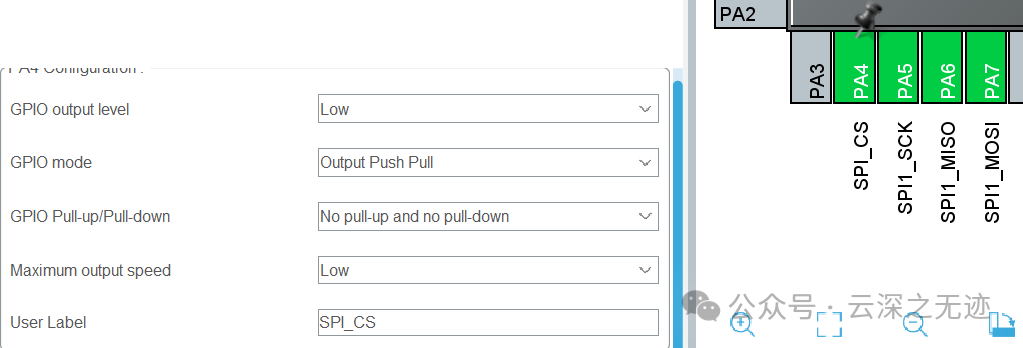
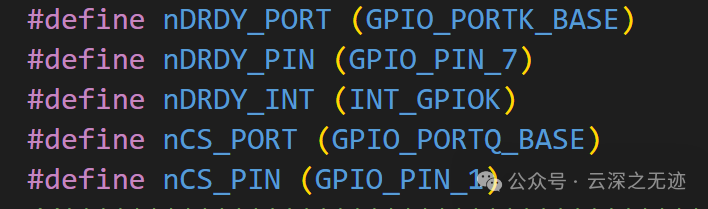
cs 自己换普通gpio,好像是自动的引脚有些问题
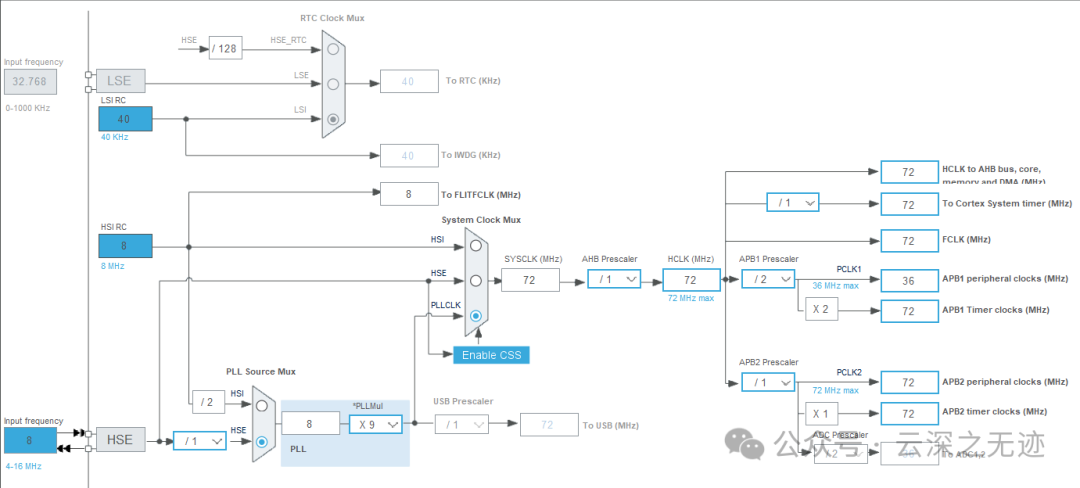
外部晶振为8MHz
1选择外部时钟HSE 8MHz
2PLL锁相环倍频9倍
3系统时钟来源选择为PLL
4设置APB1分频器为 /2
5 使能CSS监视时钟

后来我找到了中文的数据手册
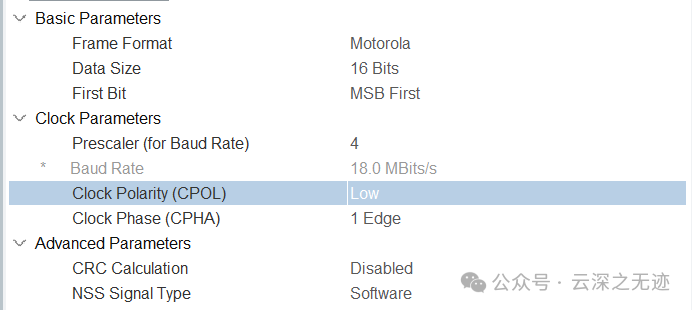
这个地方 4 种模式选择
打开窗口

打开中断
编译 Ok

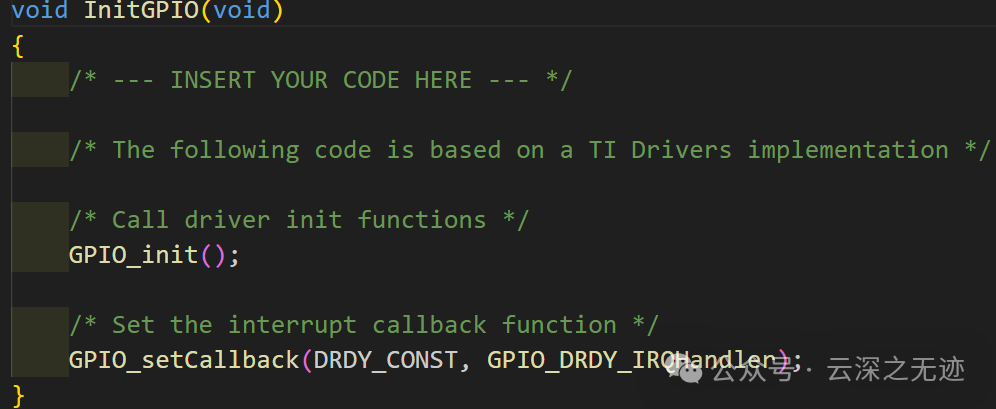
这个是TI硬件层的所有东西,一会儿就重写
ti 的板子我用的少
中断状态
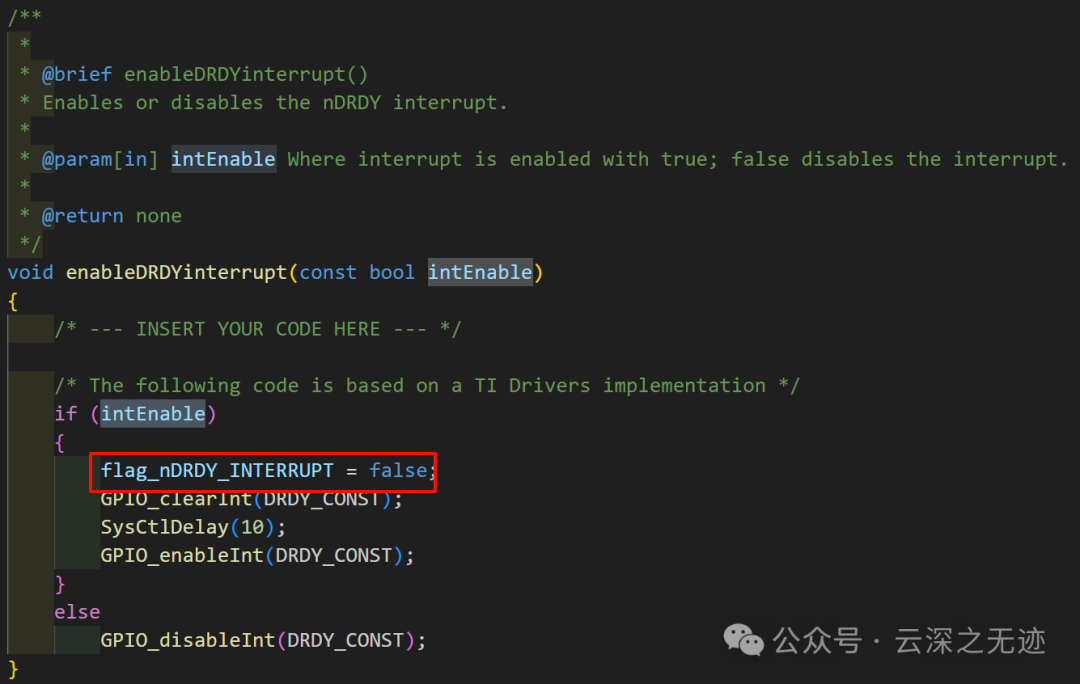
开启中断
开启中断引脚
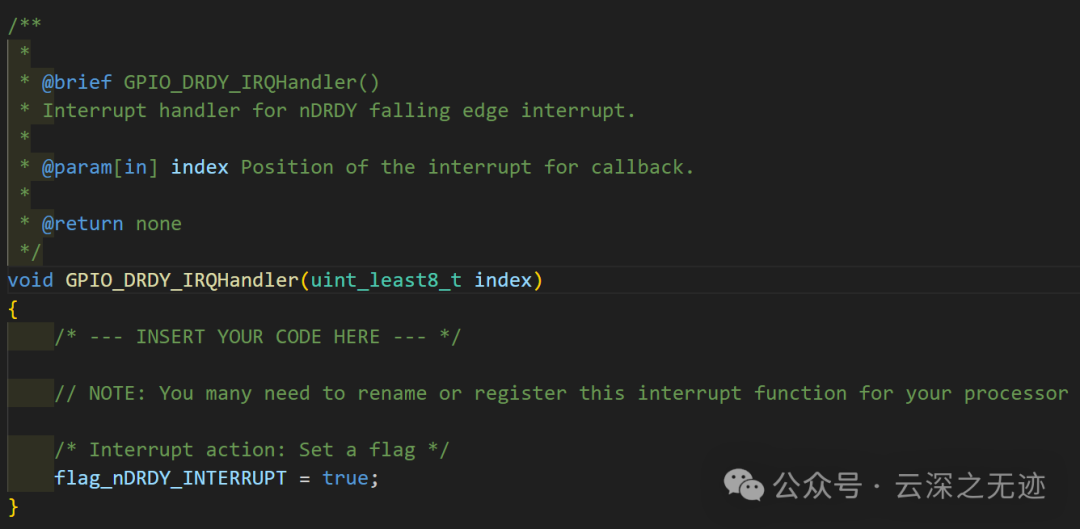
下降边沿触发中断
这个有用
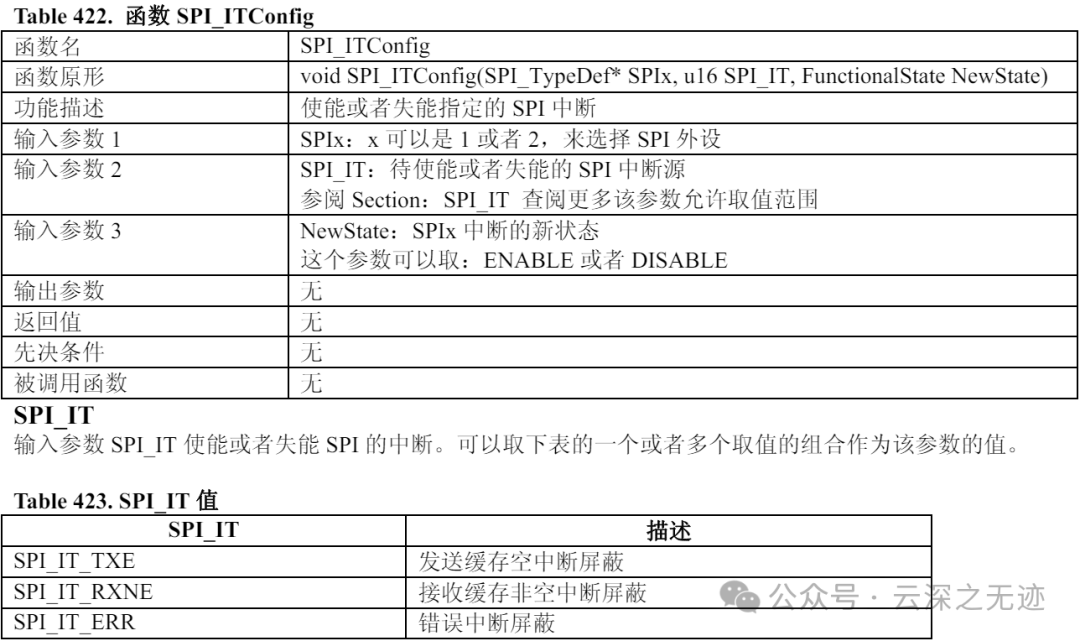
因为STM32的SPI中断和TI的中断对不上,下面就看HAL的API:
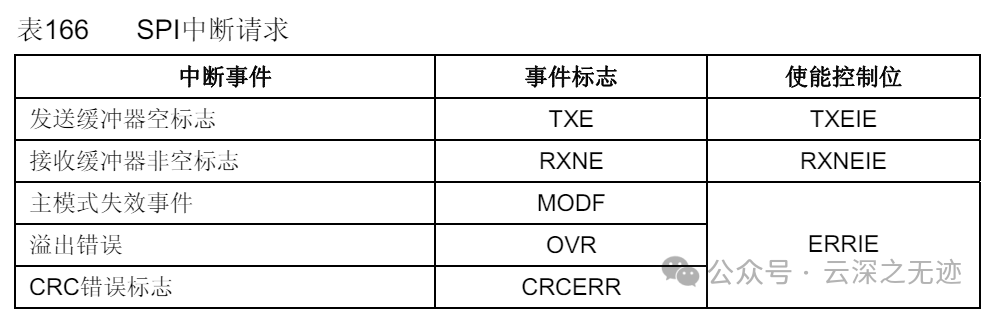
SPI的中断有这些
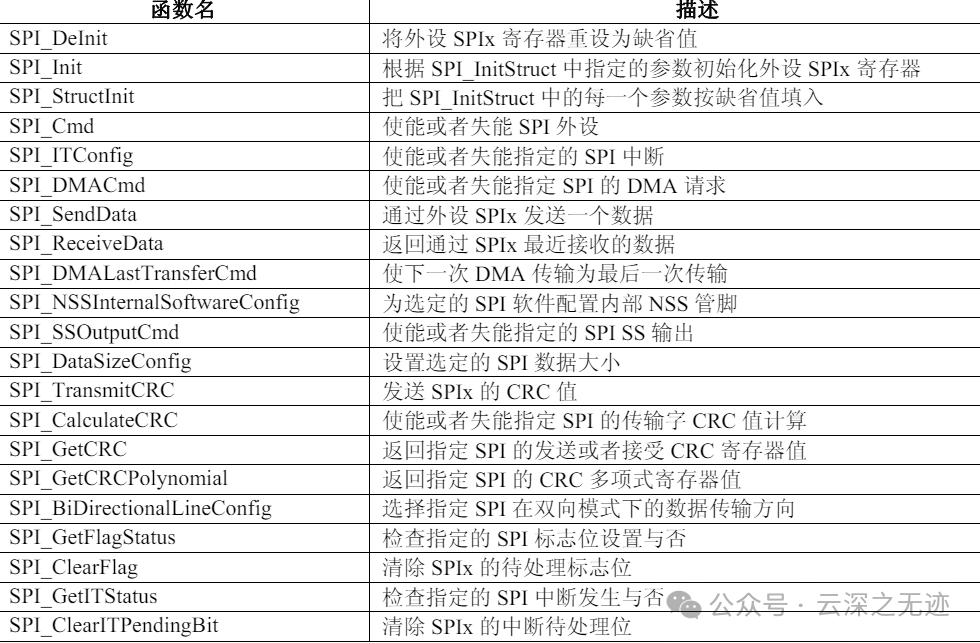
所有的函数
中断
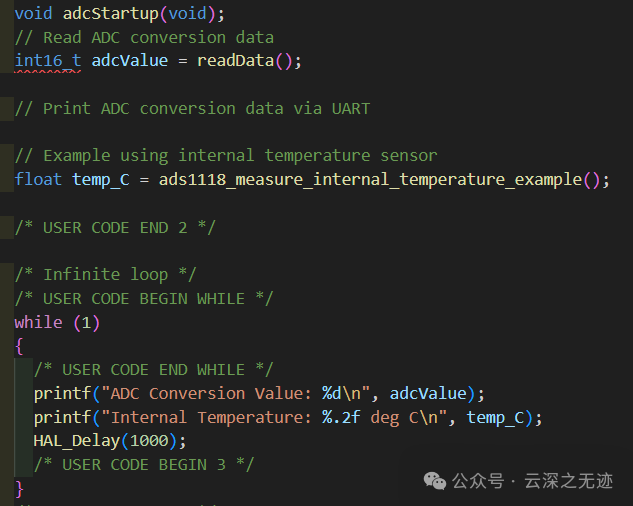
在main里面的文件
我要做的工作是在HAL文件里面构建STM32 SPI的硬件重构

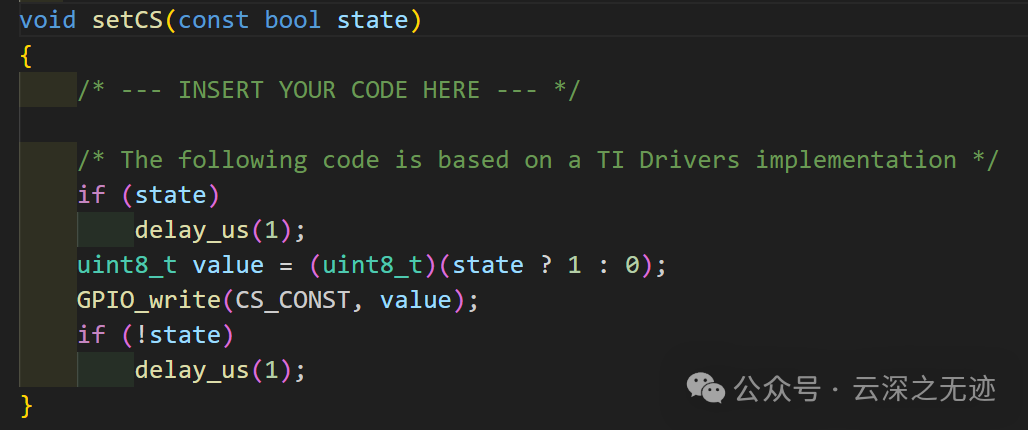
需要实现的是ms和us的延时,CS的控制和收发功能
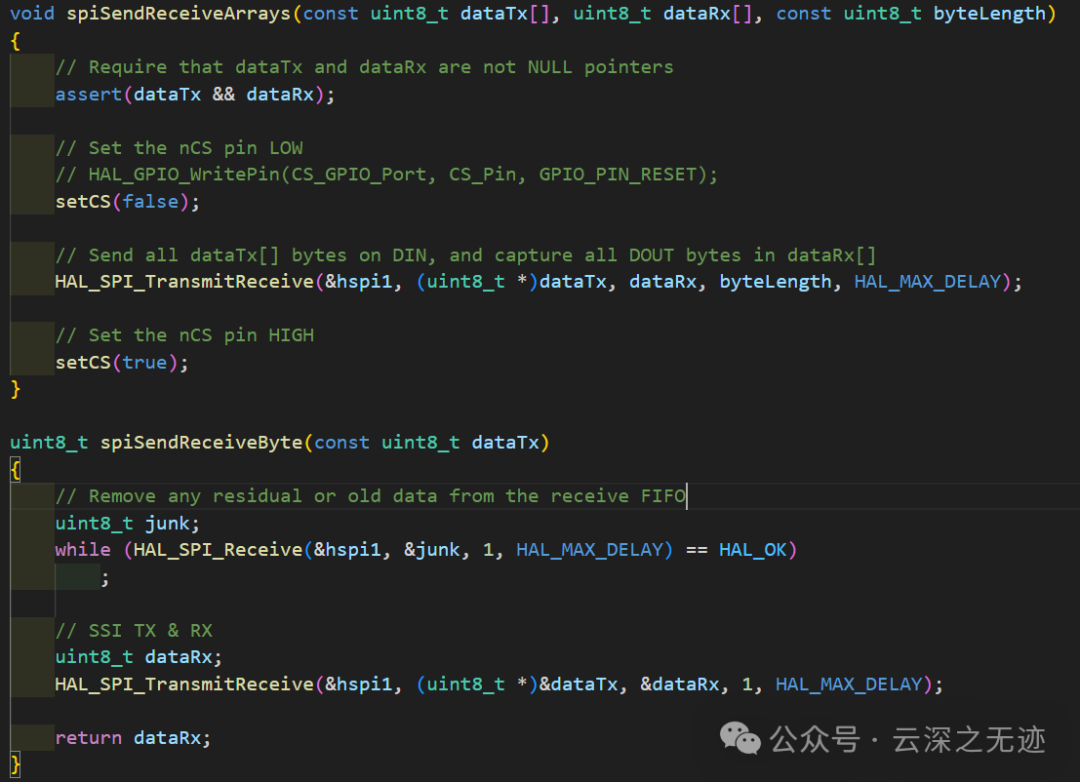
SPI函数
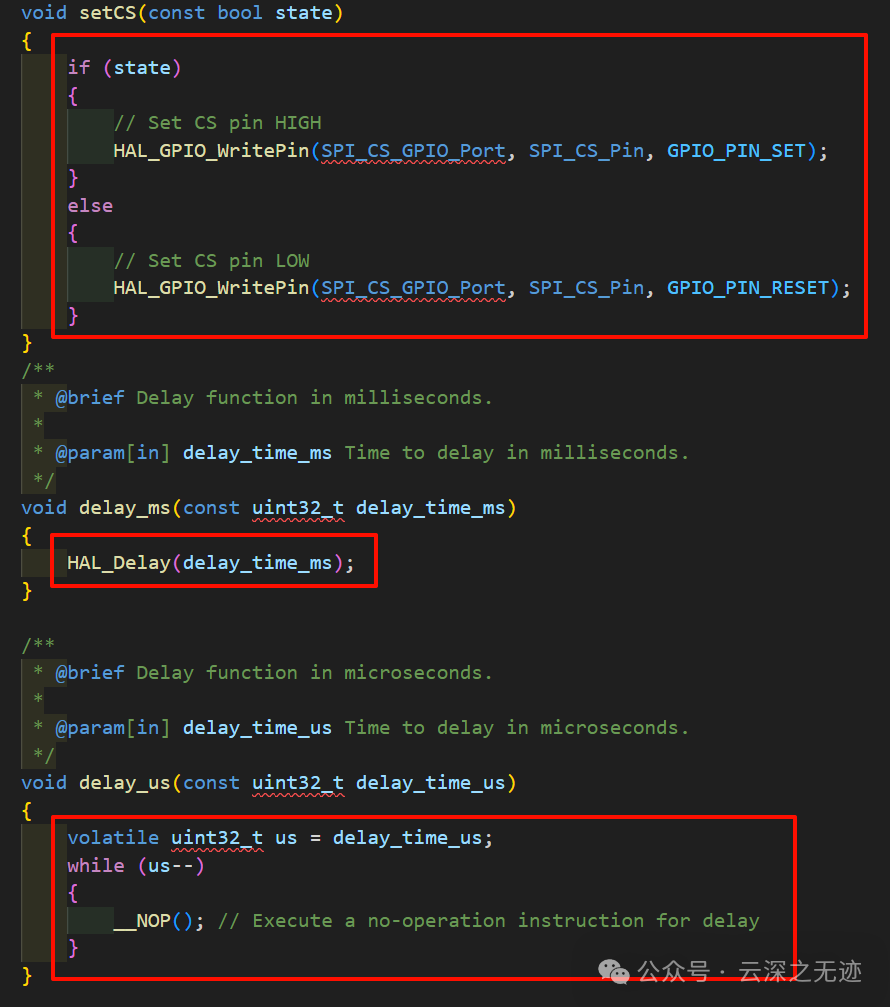
这里是延时和CS的实现
ADS1118的内部就可以不用管了。别看写的简单,debug也很耗时。
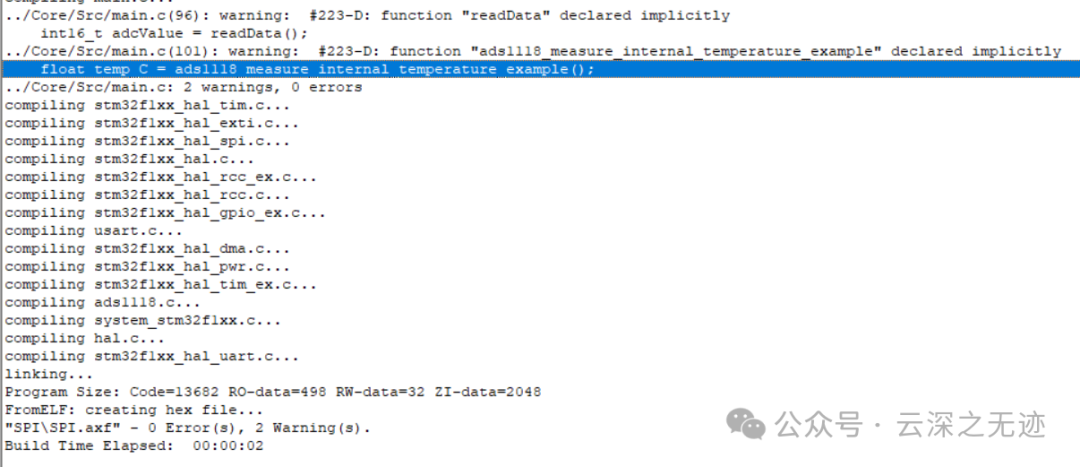
编译无错误,移植完成
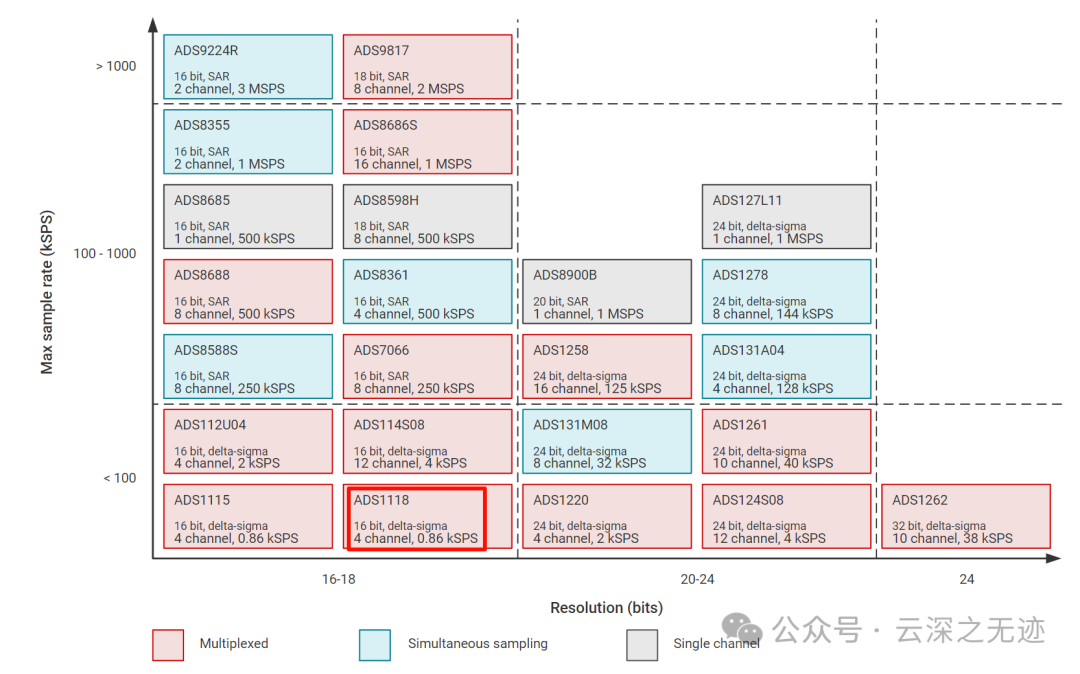
可以看看ADS1118的定位
https://www.stmcu.com.cn/Designresource/detail/software/711298
术语表:
Standard SPI: CLK, /CS, DI, DO, /WP, /Hold Dual SPI: CLK, /CS, IO0, IO1, /WP, /Hold Quad SPI: CLK, /CS, IO0, IO1, IO2, IO3 SIO0(serial io 0)
接口说明
CLK(Serial Clock):时钟线
/CS(Chip Select):片选接口
DI(Serial Data Input):数据输入端口
DO(Serial Data Output):输出输出端口
审核编辑:刘清
-
ADS1118 16 位低功耗 SPI 模数转换器(ADC)技术文档总结2025-11-18 1655
-
ADS1118温度读数错误是什么原因引起的?2025-01-24 566
-
ADS1118的硬件SPI通讯问题如何解决2025-01-20 564
-
ADS1118如果程序中采集多个通道的电压,就会发现通道错位的情况,为什么?2025-01-02 753
-
ADS1118默认上电状态,是低功耗模式,怎么启动转换呢?2024-12-13 465
-
关于ADS1118的调试笔记(基于STM32)精选资料分享2021-08-17 2104
-
请问如何才从ADS1118中读回命令寄存器中的值2019-05-27 4441
-
ADS1118产品选型及参考设计指南2018-08-29 2856
-
ads1118中文手册2016-05-09 4126
-
ads11182016-05-04 2352
-
ADS11182016-04-20 5684
-
STC12C5A60S2与ADS1118通过SPI通讯的问题2012-11-07 11110
全部0条评论

快来发表一下你的评论吧 !
