

基于红外反射式光电传感器的智能循迹小车
MEMS/传感技术
描述
本文所述的智能寻迹小车采用红外光电传感器来识别道路中央的黑色引导线,通过单片机来控制步进电机调节转向和转速,从而实现小车快速稳定的寻迹行驶。为保证小车在行驶的过程中具有良好的操纵稳定性和平顺性,本文针对道路特点对小车的方向控制和速度控制,以及传感器的安装都提出了较为理想的解决方案。
1 系统工作原理
1.1 智能小车寻迹原理
在智能车系统中,寻迹电路采用红外光电传感器进行检测并且寻迹运动。红外发射管发射的红外线具有一定的方向性,当红外线照射到白色地面时会有较大的反射,如果距离取值合适,红外接收管接收到反射回的红外线强度就较大;如果红外线照射到黑色标志线,黑色标志线会吸收大部分红外光,红外接收管接收到红外线强度就很弱。寻迹时,引导线是黑颜色,不宜反光,当红外发射管输出信号照射到黑色引导线上时输出一个非常微弱的低电平,这个过程是一个负跳变过程,通过对此信号高低电平的检测就可以知道小车是正在沿着引导线行驶,若不是沿着引导线行驶,单片机根据传感器送回的信号可以判断并驱动电机正确转向,从而使小车沿着正确的轨道行驶。本系统在小车的前部朝地面方向安装了3个红外对管,分别为左、中和右。本系统使用传感器的型号为RPR220。
1.2 系统整体原理框图
智能小车由车架、电源、光电传感器、驱动电机和主控制系统等组成,如图1所示。智能车的工作过程是:3个光电传感器探测路径信息,并将这些信息输入到单片机控制系统,单片机进行分析,通过控制算法对驱动系统发出控制命令,驱动2个步进电机,使小车沿指定的黑线前进。
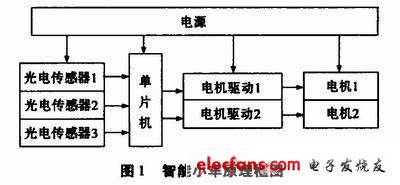
智能车的主控制器采用美国ATMEL公司生产的AT89C52。系统I/O口的具体分配如下:P2.0—P2.2共3位,用于小车前面路径识别的输入口;P1.0一P1.2用于驱动电路L297的半步/整步、正转/反转和刹停控制信号输出;P3.1用于驱动电路的时钟信号输出。
2 路面黑线检测电路
2.1 黑线检测电路
黑线检测电路共有3种方案,分别是图2的(a)、(b)、(c)3个图。图2(a)中:RPR220光电传感器应用时,理想的工作状态是输出部分处于饱和导通,查阅参数得到:UCES为0.1~0.3 V,此时IF=20 mA,IC=0.1 mA,二极管的导通电压大约为1 V,可以计算得到:
测试数据如表1:
从表1可以看出,黑白相差的电压值最大时,离反射面的最佳距离为6 mm,距离的调节范围也比较大。然后将电路图2(a)的输出直接与单片机的P2.0口相连,此时,出现单片机接收码出错,分析得出:原因是单片机的P2.0口内部有自己的上拉电阻,所以出现低电平采不回去,为了克服此现象,改用图2(b)中,去掉电路原有的上拉电阻直接与单片机相连,但是出现距离局限的问题,即实验数据表明:只有距离为6 mm时,效果很好,但距离稍有波动,单片机就不能正常工作,因此,最后选用电路图2(c),在图2(a)的基础上输出端加一个非门再接到单片机。经过测试得到:此电路应用时,光电管距反射面的距离调节范围比较大,能够满足系统的要求。
3 步进电机的驱动电路
3.1 步进电机驱动电路
步进电机具有转矩大、惯性小、响应频率高等优点,因此具有瞬间起动与急速停止的优越特性。与其他驱动元件相比,有明显优点:通常不需要反馈就能对位移或速度进行精确控制;输出的转角或位移精度高,误差不会积累,价格便宜。并且因为步进电机是根据脉冲个数决定旋转角度的,单片机只需记下脉冲个数就能计算出电机的旋转角度,从而计算出小车的行驶距离,省去了路程检测模块,简化了设计。本系统采用步进角为1.8°、两相步进电机制作小车,利用89C52单片机作为控制核心,动作相当精准,循迹时红外传感器与黑线只留相当小的裕度,小车可以基本沿弧线行走,不再是折线。用两个步进电机直接驱动两个前轮,作为主动轮;用一个万向轮作后轮,作为从动轮。将它们固定到一块大小合适的实验板上,车架就组装完毕,非常简单。分别对两个步进电机驱动,靠两个电机的速度差转向。系统的硬件设计利用89CS2单片机定时器1口输出脉冲信号,为L297提供时钟信号,P1.0、P1.1、P1.2分别作为电机正反转、半步整步和刹停的控制信号连接到L297的17、19和20管脚;L297和L298作为驱动部分,输出格雷码来驱动步进电机工作。如图3。
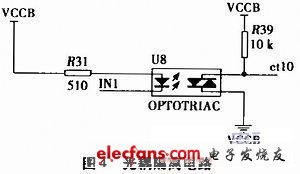
在实际应用中,常用光耦把L297的输入与单片机的输出隔开,以免影响控制部分电源的品质。如图4。
3.2 智能循迹小车的软件流程
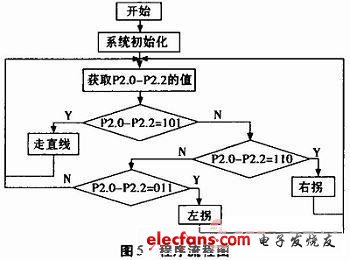
系统实现的软件流程图如图5。
4 结论
本文介绍了智能循迹小车系统的硬件和软件设计。通过多种传感器电路,进行比较、分析,最后采用较为精确的位置检测,为智能小车提供了可靠的方向控制策略,使整个系统的稳定性达到了较高的水平,整个模块可供自动寻迹小车直接使用。本文在黑色引导线的白板上制成的车道,对智能车进行了测试,数据表明:智能车在直道上可以达到很高的速度和稳定性,在弯道上只要控制好车速,智能车也能平稳地运行。
-
 极品大道
2012-09-28
0 回复 举报码盘测速模块也需要把? 收起回复
极品大道
2012-09-28
0 回复 举报码盘测速模块也需要把? 收起回复
-
极品大道
2012-09-28
0 回复 举报电机用直流电机小车跑的更快一些吧。 收起回复
-
NIR1503T反射式光电传感器规格书2023-07-13 553
-
TCRT5000光电传感器模块是什么2021-07-19 2281
-
请问红外反射式传感器如何选型?2020-05-12 2796
-
反射式光电传感器有什么特点?2020-03-06 3366
-
使用红外反射式传感器实现小车自动寻迹导航的设计资料说明2019-09-06 1613
-
如何进行红外反射式传感器的自寻迹小车的设计2019-07-04 1434
-
baumer漫反射式光电传感器OHDK 14P5101/S35A2018-04-27 3555
-
基于红外反射式传感器智能车系统的设计2017-10-27 1227
-
基于红外光电传感器和语音识别技术的智能循迹小车设计_张兢2016-05-09 931
-
双红外反射式红外巡线传感器仿真+代码2013-12-19 5861
-
红外反射式传感器在自主式寻迹小车导航中的应用2010-12-30 679
-
单光束反射式红外光电传感器ST1482010-04-22 971
全部0条评论

快来发表一下你的评论吧 !
