

CDKF、UKF和EKF滤波算法在GPS系统中的应用比较
车身电子控制系统
描述
摘要:本文分别利用CDKF、UKF和EKF三种方法对车辆GPS/DR组合导航系统进行了滤波实验,实验结果进一步表明CDKF方法明显优于EKF和UKF方法,是车辆组合导航中一种更理想的非线性滤波方法,从而真正实现了车辆低成本、高精度的实时定位。
1 引言
全球导航定位系统(GPS)因其可以提供全天候、连续、实时的高精度定位而在车辆定位中得到了广泛的应用。然而当车辆行驶于地下隧道、高山隧道、高楼等特殊地理环境时,由于GPS卫星遮挡问题的存在会造成GPS无法正常定位;基于此,一般车载导航系统普遍采用低成本的航位推算系统(DR)和GPS来构成组合定位系统。当GPS信号丢失而无法定位时,DR系统可继续工作,系统的可靠性得到了提高 。
然而,实际的车辆组合导航系统模型一般都是非线性的。利用扩展卡尔曼滤波(EKF)方法,即将非线性方程围绕状态估值进行Talor展开,并进行一阶线性化截断,可建立系统的线性化标准卡尔曼滤波模型。但是在实际应用中,EKF也存在着一些不足,如当非线性观测方程的Talor展开式中的高次项不能忽略时,EKF会导致很大的线性化误差,造成滤波器难以稳定。
针对EKF的不足,近几年出现了一套全新的非线性滤波方法,即Sigma-Point卡尔曼滤波(SPKF),其利用加权统计线性化回归技术(WSLR),通过一组确定性采样点(Sigma点)来捕获系统的相关统计参量。根据Sigma点选取的不同,其主要分为Unscented卡尔曼滤波(UKF)和中心差分卡尔曼滤波(CDKF)。
CDKF滤波算法的优势在于它克服了EKF方法的缺点,滤波时不需要系统模型的具体解析形式,并充分考虑了随机变量的噪声统计特性,具有比EKF更小的线性化误差和更高的定位精度,它对状态协方差的敏感性要低得多,且逼近速度快于UKF。研究发现CDKF的另一个优点是只使用一个参数h,相对于需要确定三个参数的UKF,在实际应用中更便于实现。
本文分别利用CDKF、UKF和EKF三种方法对车辆GPS/DR组合导航系统进行了滤波实验,实验结果进一步表明CDKF方法明显优于EKF和UKF方法,是车辆组合导航中一种更理想的非线性滤波方法,从而真正实现了车辆低成本、高精度的实时定位。
2 中心差分卡尔曼滤波(CDKF)算法描述
CDKF的出发点是借助sterling插值公式,用多项式逼近非线性方程的导数,从而避免复杂的求导运算,它采用中心差分代替Talor展开中的一阶和二阶导数。对于L维的状态向量,CDKF的sigma点的个数为2L+1,为了使sigma点具有与真实状态分布相同的均值、方差和高阶中心矩,sigma点和权值按(1)式构造:


3 试验方案设计与实现
为了验证本文所述新的卡尔曼滤波器的有效性和优越性,使用两个精度相差一个数量级的GPS接收平台,高精度的GPS接收平台使用精度较高的接收机及DGPS方法,接收到的高精度动态定位数据作为系统真实值。低精度的GPS接收平台选用精度与前者相差一个数量级的接收机及单机GPS方法,接收到的低精度动态定位数据作为卡尔曼滤波器的滤波对象,用滤波以后的状态估计值与系统状态真实值进行比较,来衡量滤波的效果。
3.1 试验平台及软件
在这里高精度的GPS接收平台选用CMC公司AllStar Base GPS板和MDS公司MDS OEM Series TM电台作为基准站,移动站选用CMC公司SuperStar GPS板和MDS公司MDS OEM Series TM电台,能使定位精度保持在2m左右。低精度的GPS接收平台选用GARMIN公司出品的OEM板GPS35LP(GPS35-HVS)。作者于2008年2月将DGPS的基准站设在江苏大学电气大楼,DGPS的移动站和单机GPS接收机置于车内,于江苏大学校门口学府路段做匀速运动,使用starview monitor和u-center 4.01在上位机上进行数据的同步接收。试验设备如图1、图2所示。
图1 DGPS的基准站
图2 DGPS的移动站和单机GPS
3.2 试验结果及分析
试验接收的到的部分数据如下:见表1。
表1 接收机接收到的数据

将新的CDKF滤波算法应用到GPS导航定位系统中。分别采用EKF,UKF和CDKF三种滤波算法分别对实验获得的GPS数据进行滤波处理。试验结果如图3、图4所示。为了更直观地表现三种滤波算法的效果,分别将三种滤波方法的误差均值列于表2。
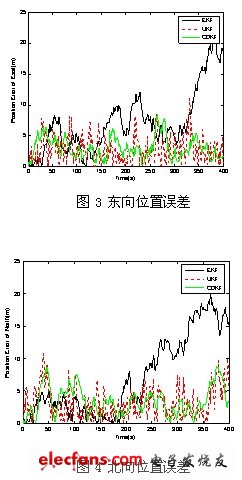
从滤波曲线图3和图4可以看出:采用CDKF和UKF滤波的东北向位置误差都控制在10米以内,而采用EKF的位置误差比较大;从表2也可以得出,对于经纬度误差均值和东北向速度误差来说,CDKF和UKF两种算法也明显优于EKF,可见,CDKF滤波的定位精度和可靠性都大大高于了EKF,但是UKF的计算量相对EKF略有增加,而由于CDKF相对UKF的计算参数减少,因此逼近速度相对提高,使得计算量也有所减少。
表2 三种滤波算法的误差比较

4 结论
本文阐述了一种新的滤波算法-中心差分卡尔曼滤波,并将其应用到GPS/DR组合导航系统中,分析了其在滤波方法和计算过程中的明显优势,通过多次实验、参数调试得出EKF、UKF和CDKF三种滤波的实验对比,无论是在定位精度、速度方面还是计算量上,CDKF都优于前两者,并且其实现方法相对简单,应用范围更为广泛,是动态系统一种有效的状态估计算法。
-
一种新的粒子滤波算法在INS/GPS组合导航系统中的应用2010-04-24 2634
-
非线性滤波在四轴飞行器中的应用2015-12-31 7462
-
基于遗传算法优化EKF算法的SOC估算2020-03-12 7946
-
EKF和UKF算法在四轴飞行器视觉组合导航中的应用是什么2021-05-13 1671
-
TDOA/AOA混合定位方案中的UKF算法2009-04-13 1060
-
非线性滤波算法在机动目标跟踪中的研究2010-07-08 823
-
GPS非线性估计中无导数卡尔曼滤波研究2010-07-26 394
-
GPS信号阻塞情况下的EFK算法改进2010-11-22 1102
-
一种EKF改进算法探讨2011-08-11 2859
-
UKF滤波算法_非线性系统2016-02-23 1281
-
直接法UKF在组合导航中的应用_练玉新2017-03-20 1113
-
改进UKF算法在PMLSM无位置传感控制中的应用_王桂荣2017-03-19 933
-
基于UKF和优化组合策略的改进粒子滤波算法2017-11-17 1148
-
基于WLS-KF算法实现对目标较高精度的定位和跟踪研究2020-08-27 4678
-
卡尔曼滤波(KF)与扩展卡尔曼(EKF)2023-05-10 1018
全部0条评论

快来发表一下你的评论吧 !
