

人形机器人制作秘籍 全面还原DIY制作过程
电子制作
描述
如果你也不满足于简单的手工活,如果你也有一帮和你一样的兄弟,如果你们想创造和自己一样能走能爬的机器人,那么请关注这里,我们将分享机器人制作所需的全部秘籍,助大家一臂之力。
1 理论方面
要让一个机器人能完成各种动作,高中的一些力学,运动学知识自然必不可少。在构建我们的机器人骨架过程中,主要的运动部件就是舵机了,整个机器人就是靠着舵机轴的转动来完成各种复杂的动作。在设计整体的结构时候,应该画出各种可能需要做的动作的结构简图(用点线表示)简单计算一下质心高度和位置保证机器人的平衡。
以下是具体的做法:
先把舵机看做一个质点,用点加一个小竖线表示舵机的转轴,直线表示两个轴之间的距离,大致画出整体静态草图。(两点之间的距离至少要大于舵机的高)
画出所需完成动作的分解草图,将所有运动都分解为绕给定轴的转动,如果发现有哪些动作无法完成考虑:1.改变轴的排布,方向。2.增加轴
不考虑线的重量,只考虑舵机的重量,对每个草图分别计算各个过程中机器人的平衡状况。调整舵机间的长度
Tips1: 每种舵机都会有其尺寸,重量,扭矩,以及转速等说明。在使用舵机时,应该尽量减小垂直于舵机转轴的受力,不然容易烧坏舵机。
Tips2: 舵机只能转180度,在动作中务必排除需要超过180转动的情况
1.1 我们的大强要完成什么动作呢?
我们要让大强“飞”起来,作为一只金刚,单单飞似乎少了什么,为此我们给大强设计了《金刚》的路线,一路跋山涉水拯救MM(剧情见最后)
1. 四足行走
由于我们设计的机器人重点放在了手臂上面,故对腿部进行了简化。行走时采用对角两条腿交替前进的方式。前进腿(图中箭头标注)向前跨步的同时,支撑腿有一个后蹬的动作以实现行走——俗称“爬”
2. 多杠攀爬
这时的大强已经开始了艰苦卓绝的翻山越岭之路。
多杠连续攀爬并没有想象中那么简单,考虑到在前进时有一只手必须离开杠,为保持平衡,故采用左右静态摆动身体的姿态前进。
A. 开始时通过肩部舵机作用将重心移动到一只手上(图中为左手)
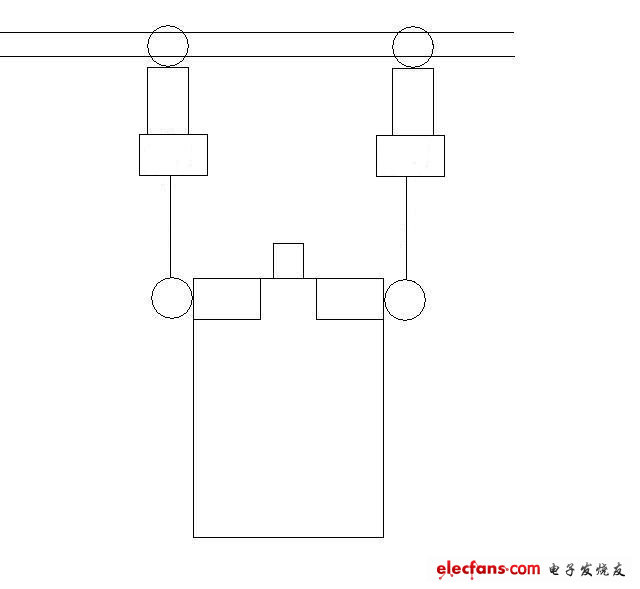
多杠攀爬动作图(1)
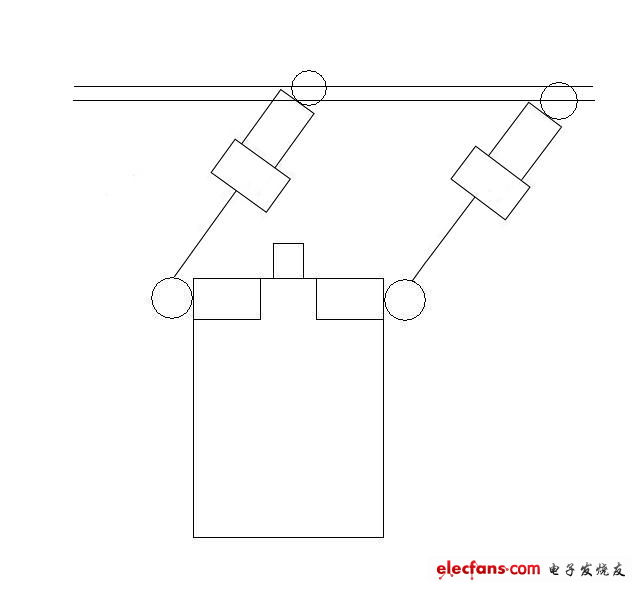
多杠攀爬动作图(2)
B. 放开不支撑身体的手臂(图中右手)向前抓住下一只杠.(左侧一列图是侧视图,右侧一列图是正视时两只手的位置)

多杠攀爬各动作图(3)
C. 肩部两舵机配合向前移动身体,在身体前进的同时将重心转移到抓住前面横杠的手上(图中右手)
D. 放开后面杠上的手(图中左手)并重复上面的动作,实现多杠上的攀爬行走
3. 单杠动作
终于来到了“她”的身边,到了展现实力的时候了! 我们不仅要让大强在多杠上爬行,还要让他在单杠“飞起来”。
不急,起飞之前先来活动一下筋骨吧!先做100个引体向上吧!!(话说我连十个都做不了)
(1) 引体向上
A. 肩部和肘部的舵机同时用力将身体拉起 B. 肩部和肘部舵机反向用力回到初始位置,完成一个引体向上

引体向上动作图
(2) “飞”吧!
A. 收缩机器人腿部减小力臂,通过肩部舵机的作用将机器人身体从一侧提升至高处

单杠翻滚动作(1)
B. 将腿伸直后舵机反向用力使机器人在杠上荡起
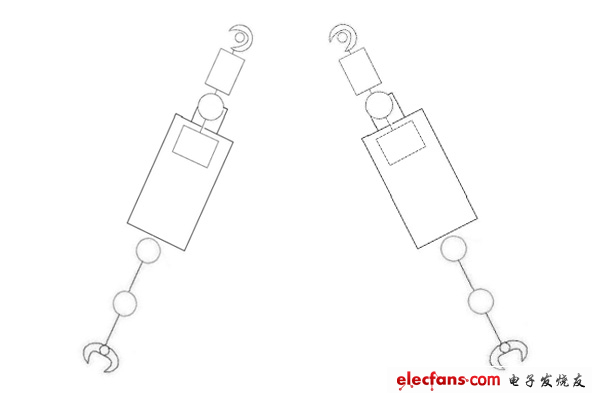
单杠翻滚动作(2)
C. 在向下摆动过程中肩部舵机和腿部舵机同时用力使机器人摆动幅度增大,并在摆至高点后舵机反向用力。对机器人本身,动作和A步骤相同
D. 几次摆动后便可以完成飞跃的过程
说明:由于我们的大强没有传感器,无法判断自身在杠上的具体姿态,所以我们决定让机器人在杠上以相同的时间间隔完成固定次数的动作。虽然不一定每次都能成功完成翻滚,但同时每次的动作都不相同,效果也应该不错。
为了验证这最为关键的一步,我们还动手做了个试验版:具体过程就不说了,直接上图

1.2 下面来点静力分析
为选择各关节舵机的型号,对其在极端情形下的扭矩进行估算。机器人总质量约2kg。
极端姿态1---引体向上:
引体向上受力分析
此时,肘关节受力最大。考虑其静力矩。估算过程如下: 相对于肘关节,身体的力臂大约为7.5cm,重量约为2kg,考虑两只手同时用力,每只手受到的力矩为

因此12kg.cm的舵机可以提供足够的力矩完成动作。
极端姿态2---翻越单杠:

翻越单杠受力分析
手部主要由固定部分承受作用力,舵机不需要提供太大的作用力。当身体翻越单杠时,滑动部分可能会受到一定的作用力,但由于:(1)翻越过程时间很短,对舵机的作用时间不长,(2)有一定的离心力作用,抵消部分重力,(3)该部分受力时,身体质心基本在杠的正上方,力臂很小,对舵机产生的扭矩不大。估计力臂为2cm,重量大小约为2kg,故力矩约为4kg.cm,一只手所受力矩为2kg.cm,小于小舵机的最大力矩5kg.cm,所以不会对舵机产生太大的损坏。
1.3 三维建模
OK,经过以上步骤大家已经得到了一个基本的点线视图,也基本上能完成动作。但为了避免各种碰撞,以及给电池,电路板留下摆放的位置,这时我们需要一个完整的机器人的三维图形,手画还是有点难度的,在这个电脑泛滥的时代,选择一个好的CAD软件来帮助画图上手会很快(偷懒的好办法!),并且不需要特殊的制图工具(省经费的好办法!)这里我们推荐用容易入手并且 以机械为主的绘图软件 SolidWorks 完成机械部分设计。
自学SolidWorks不会太难,因为SolidWorks基本操作都能用鼠标解决,不需要记什么命令(高手可以选择其他更专业的软件),另外SolidWorks有由零件的装配图直接生成工程图,以及自动标注尺寸,基本免了自己动手画,并且绝不会出错,还有模拟运动等高级功能。
关于solidworks的学习这里就不详细讲了,推荐几个网上几个SolidWorks自学教程(去百度google一下有不少,视屏教程最容易入手 看几个例子跟着操作一下基本上就会了) 参考书的话可以准备两本,一本以例子多的例如《solidworks 实例》 一本系统点,供快速查阅的例如 《solidworks?2008 从入门到精通》 (看例子出现问题的时候可以翻翻) 当然,最权威最全面的 就是SolidWorks自带的帮助文档(不推荐,讲的太细,书上找不到解决方法的问题再查阅文档)。这样跟着网上教学视屏练得话几个小时基本上就能上手。
另外,一本机械制图的教材最好还是备上,主要用来了解一些基本符号 术语 以及很关键的 国标——也就是国家规定的标准件。(查到后可以直接在solidworks里面调用画好的零件,方便省事)知道各种标准件的作用,和基本的固定方法。
2 实际模型图制作
以下是用cad软件构建模型的步骤:
具体的连接方式可以先不管,先画出单个舵机,以及各个关键部件(在SolidWorks上画出来) 主要的零件——舵盘,标准螺丝,螺母等。

舵机。

舵盘。

上螺钉的舵盘整体。

齿轮(自己画的非标准,最后没有用到……)。
Tip1: 舵机的模型最好做精确些,参照具体型号的标准尺寸(推荐实测)。然后参照已经画好的点线模型,将点改成舵机,调整好各部位的距离。
怎样连接两个舵机呢?为了让我们将DIY进行到底,在这里我们选择自己加工强度大重量轻又容易塑形的1.5mm铝板,用如下图这种方式将舵机包起来并与另外的舵机通过轴上固定的舵盘相连。 (这里大家不必拘泥于我们的方法,可以发挥想象力构造自己考虑连接方式。) 在solidworks下将零件组装成装配体。
Tips2: 先把各个包好的部分装配体模块化,再用由上到下的顺序或者由下到上的顺序一个个组装成装配体。(由于不再是点线的简单结构了,在这里还要进行各关节的简单受力分析,尽量通过设计上的改动避免舵机轴承之类脆弱的地方承力。)

用铝板包好的舵机。

手部的装配图。

整个手臂的装配图。

整条腿的装配图。

完整的机器人装配图(原始图)。
考虑实际的装配情况,给每个模块之间合理的连接方式,例如用螺钉螺母固定,万能胶,热熔胶,胶带,绳子,弹簧……尽情的发挥你的想象力吧! 一般相对牢固的方式是通过打孔然后用螺钉螺母固定,采用这种方式的同学们一定要注意了!千万别忘了考虑螺钉的大小和位置!!
让我们无视他,继续做下去吧!将实际的问题反映到模型图上,即对模型修改(建议对零件改,不要从装配体上直接改。)
最后检查是否有重叠,碰撞。
3 实际制作
好了,经过了重重检验,一个完美的效果图终于出来了!各种运动我们也分析好了!开始干力气活吧!
别急,现在还什么都没有呢!
3.1 准备工作
买铝板。
买螺丝,螺母,垫片。
准备个五金工具箱。
有台钻,车床,铣床,剪板机,折板机之类大型机器可用最好。
没有的话:用手钻代替台钻(想 DIY台钻 的看过来~),手加台钳代替折板机,铁皮剪或手锯代替剪板机,车床铣床都可以不用。自给自足!完全DIY!!东西都备齐了,现在开始干活吧!
3.2 具体制作
要有熟悉机械的人指导最好不过,实在没人教可以翻工具手册,或上网查各种工具的用法。
首先在铝板上用油性笔画出轮廓线包括折线,以及孔的位置。(这一步必须非常精确!)
先用剪板机或铁皮剪剪下需要部分,接着用折板机或台钳折板,然后用台钻或手钻打好孔。最后,对于不满意的地方——锉!(锉刀才是王道!)理论上来说,木有什么形状我们锉不出来!!!!!!!!
有的比较复杂或者精度要求比较高的结构比如下图所示我们机器人的手部结构——需要很精细的加工,并且要承受较大的力,这时则可以考虑用solidworks画好做好工程图后,拿去机械厂加工。比如以下几个结构:

这是我自己设计并送往机械厂加工的的拇指工程图。(画红圈的位置在实际运动过程中发现有点紧,需要稍微磨掉点。)

钩子的工程图。
4 组装
组装要及时,这样才能及时发现问题及时修改!
给零件标上号。
将各个模块装配好,测试各个模块的强度,以及灵活程度。
依照从下而上的顺序,依次连接好各个部分。
将其他物件如电路板,电池固定到机器人身体上。
对舵机进行布线(可以用胶布将同方向的线束起或者粘在外侧),给机器人的运动留下足够的空间,避免任何可能缠绕或碰撞。
Ok,一个崭新的机器人 诞生了!!!!铛铛铛铛(音乐响起~~) 鼓掌!撒花!
注:我们在实际机械制作过程中遇到了各种问题(没考虑到螺丝粗细),以至于后来手部结构重新设计,由于需要做弯折,而弯折很难做精确,所以没有再用solidworks画。想要一点问题都不出还真不是那么简单。 所谓无图无真相,大家还是看图吧!

早期的大强
-
 yongyuan824
2012-11-16
0 回复 举报不错,哈哈 收起回复
yongyuan824
2012-11-16
0 回复 举报不错,哈哈 收起回复
-
良师益友 2012-08-04
0 回复 举报真正的创造大师。 收起回复
-
写字机的制作过程2023-09-27 1140
-
写字机器人制作过程2020-12-25 10465
-
智能小车机器人制作大全2019-05-05 9923
-
六足机器人制作过程2018-09-14 22969
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 194903
-
【下载】机器人制作-入门篇(完整版)2017-06-07 211999
-
电子工程师DIY:六足机器昆虫制作全过程2016-09-04 4547
-
分享 《机器人制作天空宝典》,OHM 自律型机器人制作2013-05-06 12202
-
DIY船制作过程2012-09-29 14968
-
工程师电子制作故事:WIFI机器人DIY设计2012-08-15 64305
-
机器人制作宝典2012-06-09 10987
-
【DIY作品秀】用iPhone制作智能机器人2012-01-10 15956
全部0条评论

快来发表一下你的评论吧 !
