

实现稳健的微控制器到FPGA SPI接口: 双缓冲区!
描述
问:实现稳健的微控制器到 FPGA SPI 接口: 双缓冲区
在介绍双缓冲器之前,我们将简要探讨Verilog 脉宽调制器 (PWM) 的工作原理。这一点很重要,因为双缓冲区最好被看作是硬件模块 (如 PWM) 的可寻址接口。
PWM 的回顾
PWM 模块的顶层接口在这个 Verilog 代码片段中描述。观察该模块使用了位宽参数,并建立了最小和最大占空比限制。最后,观察PWM模块有一个[B - 1:0]输入矢量来设置占空比。没有显示的是在每个 PWM 占空比开始时读取输入的事实。
module PWM #(parameter
B = 12,
D_MIN_PERCENT = 0,
D_MAX_PERCENT = 95
)
(
input wire clk,
input wire enable,
input wire [B -1:0] d_in,
output reg PWM,
output reg [B -1:0] cnt
);
“
同步数据呈现
PWM 设计用于在更大的 uC 到 FPGA SPI 系统中工作。回想一下,SPI自然地使用字节宽度的数据元素进行操作。这与使用B定义的数据宽度操作的PWM形成鲜明对比。为了方便,我们假设 PWM 以16位的位宽度(B)实例化。
当系统更新与 PWM 输入相关的寄存器时,会出现一个问题。如果没有适当的注意,PWM 可能会在更新过程中执行读取操作。其结果是驱动器字节被分割成一个旧字节和一个新字节。这可能导致占空比的显著跃升,持续一个 PWM 周期。如果 PWM 用于LED 指示灯,则可能不会注意到这一点。在更复杂的系统中,故障相当于一个强脉冲,并可能导致系统响铃或变得不稳定,具体取决于错误发生的时间和频率。
解决方案是实现以下三篇文章中提到的双缓冲方案,后面将进行深入讨论。
第1 部分介绍了指导大型系统开发的 Verilog 设计理念。这是介绍寄存器传输电平 (RTL) 设计准则的关键部分,如时钟边界、频闪器的使用和双缓冲区的必要性。
第2部分介绍了 SPI 协议。回想一下,所选协议改编自802.3以太网帧,具有可变有效载荷长度和循环冗余校验 (CRC) 等概念,以提供数据完整性的度量。
第3部分介绍了 uC 到 FPGA 接口的高级视图。那篇文章中最重要的部分是这里重复的框图。
使用一组寄存器来捕获单个字节。当收集到完整的n字节数据时,更新第二个更宽的寄存器。第二个寄存器-双缓冲区-然后用于驱动其他模块,如代表性的 PWM。
双缓冲模块
双缓冲模块的框图如图1所示。在内部,它由四个主要部分组成。最重要的是输出寄存器。在这个例子中,它是16位宽,使其适合驱动16位 PWM。输出寄存器由单个8位寄存器驱动,在本例中它们被标记为 LSB 和 MSB。注意,所有的寄存器更新都是由双缓冲区的控制部分发起的。这是一个同步操作,其中所有元素响应主 100mhz时钟的滴答声。
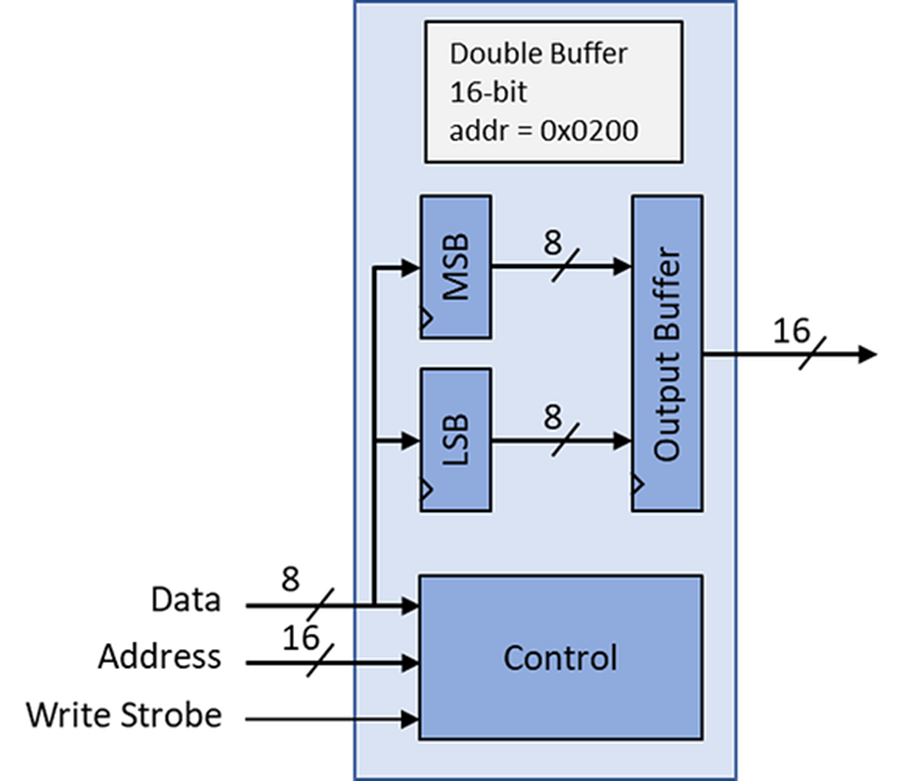
图 1 :双缓冲区的框图,显示了单个8位缓冲区与输出缓冲区之间的关系。
重要的是要理解,每个双缓冲区模块都是用特定的地址和特定的字节宽度实例化的,如下面的代码清单所示。注意,16位地址、8位数据和写频闪都涉及到加载缓冲区。当16位地址输入与实例化地址匹配时,数据传输就开始了。
module
double_buffer #(
parameterBYTE_WIDTH = 2,
parameterBASE_ADDRESS = 16'h0200
) (
input wire clk,
input wire [7:0]data,
input wire [15:0]address,
input wirewrite_strobe,
output reg [((8 *BYTE_WIDTH) - 1): 0] double_buffer_out,
output regnew_data_strobe
);
如图1所示,这个 uC 到 FPGA 接口有一个底层的8位传输过程。在这文章中首先介绍的命令帧中也隐含了一个连续写入操作。为了方便起见,这里将命令帧重复为图2。作为一个例子,让我们假设 PWM 和相关的双缓冲区以地址0x0200实例化。命令帧的写地址将被设置为0x0200,负载的前两个字节将保持所需的16位 PWM 值。
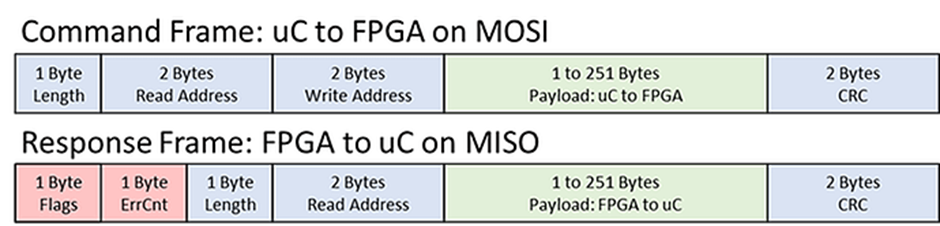
图 2 :构成uC到FPGA SPI协议基础的命令和响应帧。
当接收并验证命令帧时,MSG 写块将断言地址0x0200,该地址指向 PWM 的双缓冲区。它将把第一个有效载荷字节放到数据总线上。最后,它将为一个时钟周期断言写频闪。这将加载如图1所示的 MSB (大端)。
继续进行连续写入,MSG 写入器向前推进地址,断言下一个数据字节,然后脉冲写入频闪,从而将 LSB 加载到双缓冲区中。这个过程对命令帧中的每个字节继续进行,由帧的字节长度字段控制。
从本质上讲,消息编写器并不了解相关的双缓冲区的长度。它只关心断言地址、数据和写频闪的三步过程。这取决于双缓冲区模块来理解它们何时被寻址,以及何时接收到 BYTE_WIDTH 参数指定的必要字节数。
由于双级缓冲区的基址和字节宽度在实例化时是已知的,因此很容易确定何时接收到所有字节。在这个 PWM 示例中,双缓冲器计数到2,然后发送一个频闪来加载输出寄存器。
技术贴士 : 数据可能首先访问最高有效字节 (MSB) 或最低有效字节 (LSB)。描述顺序的术语是“端序” (endian)。如果 MSB 先出现,则系统为大端序。如果 LSB 是第一个,则系统是小端序的。本文描述的双缓冲区和关联帧是大端序。
双缓冲区代码
双缓冲区的 Verilog 代码附在本注释的末尾。代码紧跟图2的框图,理解它可以扩展到n字节的宽度。这可以通过更改 BYTE_WIDTH 参数来实现。
这段代码的关键是 Verilog 生成操作符的使用。回想一下,generate特性允许迭代地生成硬件。它的运作方式就像一个制造小部件的工厂。
除了,在这种情况下,我们正在制作8位寄存器,其程序集的总数等于 BYTE_WIDTH 参数。我们可以在 Vivado 分层设计窗口中看到这一点,如图3所示。这些“制造”的块与它们在生成循环中定义的连续命名方案一起出现。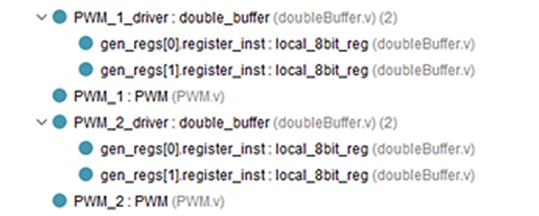
图 3 :在双缓冲区实例化中可以看到生成的字节宽度寄存器。
观察每个生成的9位寄存器都包含一个对应的 local_write_strobe。这是一个重要的设计方面,因为 “control”部分使用它来加载相关的8位寄存器。
除了寄存器之外,生成循环还制造一个8位矢量,每个8位寄存器的输出都连接到这个矢量上。然后将这些N × 8位的包连接起来并传递到n字节输出寄存器。
代码的最后一部分确定n字节何时被收集。然后它更新输出寄存器并发送一个new_data_strobe。
控制部分有三个基本功能:
当基址与实例化地址匹配时激活模块。
维护一个计数器指向“制造的”8位寄存器。这个计数器对于连续写入是必不可少的。
对相关的8位寄存器进行频闪。
当N个8位寄存器被填满时,对输出缓冲区进行频闪。
技术贴士 :矢量是导线的一维数组。一个例子是“input wire [15:0] address”,它定义了一个16位的名为 address 的矢量。
结语
最后,虽然这段代码确实很复杂,但 Verilog 生成操作符提供了很大的灵活性。它消除了为每个期望的字节宽度构建独立模块的需要。
-
L9663如何使用上行缓冲区发送同步脉冲?2025-03-13 515
-
RTOS的流缓冲区机制解析2025-02-14 1361
-
C++环形缓冲区设计与实现2023-11-09 4199
-
环形缓冲区的实现思路2023-01-17 3087
-
STM32微控制器上的Octo-SPI接口2022-11-21 1921
-
SPI接口如何实现微控制器之间的通信2022-08-02 3711
-
什么是双缓冲区模式?2021-12-08 2248
-
缓冲区是啥意思 STM32串口数据接收之环形缓冲区2021-07-22 12143
-
请问如何实现微控制器与FPGA的接口设计?2021-05-06 1811
-
UART双缓冲技术:友好中断2020-09-19 2274
-
环形缓冲区的实现原理2020-03-22 8643
-
基于ARM和FPGA的环形缓冲区接口设计方案2019-05-30 2661
-
采用FT245BM和FPGA实现USB接口设计2019-04-22 1573
全部0条评论

快来发表一下你的评论吧 !
