

浅析IGBT并联技术-并联方法分类
描述
IGBT并联技术-并联方法分类
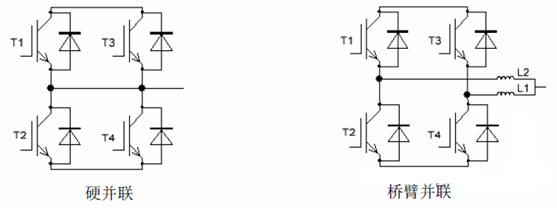
IGBT并联可以分为“硬并联”及“桥臂并联”2大类。
(1)“硬并联”指的是IGBT的发射极和集电极直接连接在一起,如左下图所示;
(2)“桥臂并联”指的是,IGBT桥臂的交流输出端通过均流电抗(感量有一定数值)连接在一起,如右下图所示;
桥臂并联: 桥臂并联是一种风险比较低的并联技术;
硬件电路的特征:
(1)两个桥臂的输出首先接到一个均流电抗,然后再将电流汇在一起;
(2)并联的两个IGBT不能共用IGBT驱动器,必须使用各自独立的IGBT驱动器;
(3)驱动器的输入PWM信号必须足够同步的。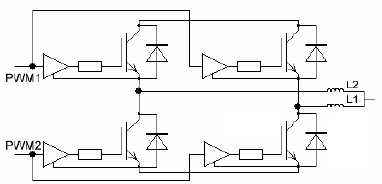
IGBT桥臂并联拓扑中的换流回路分析: 在IGBT桥臂并联的电路拓扑中,两个桥臂有各自独立的换流回路,这两个桥臂是不会存在交换电流的情况。 具体地说:
(1)如果在D1续流时开通Q2,则D1发生反向恢复,且反向恢复电流全部流进Q2,不会跑到Q4去,如下图红线所示;
(2)如果Q2在导通电流,则关断Q2时,电流全部被D1所续流,不会跑到D3去。
原因就是在两个桥臂之间,存在着L1和L2这两个电抗,这样两个桥臂之间的动态阻抗会比较高,换流的动态过程中的高频电流是不能从一个桥臂跑去另外一个桥臂的,被电抗阻挡住了。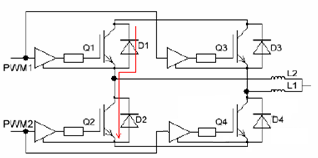
结论:这种并联方法不存在动态均流的风险。每个桥臂的换流行为独立进行。
以上命题成立有一个很重要的前提,就是L1和L2的数值必须足够大,至少足以阻挡桥臂间的换流行为。
IGBT桥臂并联拓扑中均流电抗的分析:
在IGBT桥臂并联拓扑中,每个桥臂的输出阻抗会决定输出电流有效值的分配情况,在下图中,均流电抗L1和L2分别归属左桥臂和右桥臂,很显然,桥臂的输出阻抗的主体是均流电抗的感抗,而IGBT桥臂本身的阻抗与感抗相比可以忽略。
所以,决定两桥臂的出力水平(或整体均流水平),主要由均流电抗L1和L2的感量决定。感量偏大,则对应桥臂的输出电流偏小,感量偏小,则对应的桥臂的输出电流偏大。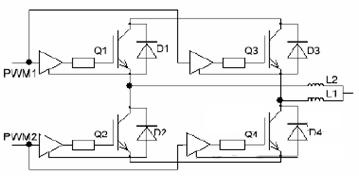
结论:桥臂的整体均流情况,是由桥臂的均流电抗的感抗的比例决定的。
这种电路中,电抗的制造工艺比较关键,感量的偏差水平将决定桥臂的静态均流水平。电路均流的风险转移到了电抗上。
IGBT桥臂并联拓扑中驱动信号同步性的分析: 在IGBT桥臂并联拓扑中,要求PWM信号要足够同步,这里“同步”这个概念需要量化。用很具体的方式来描述信号同步的程度。
在这种应用中,同步性要求比较低,不需要达到nS级,有百nS级即可。
如左下图所示,两个光纤发光头被同一个电流点亮,然后将信号传递到INA及INB,我们可以说这两个信号是“同步”的,但其实发光头,光纤通路,接收头理论上都是存在时间差异的,在最差的情况下应该有几百ns,甚至超过1us的差异。
不过在桥臂并联应用中,这是完全可以接受的。工程中可以忽略这个差异。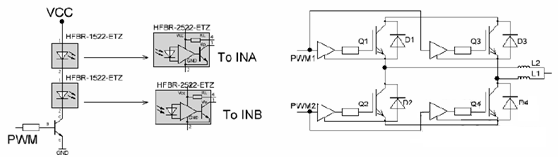
IGBT桥臂并联拓扑中均流电抗的选取原则: 均流电抗的数值的选取很重要,因为电抗的成本不低,如果感量太大了,成本就会上去,且散热也是问题。
因此选均流电抗的原则是:在满足均流性能的前提下,感量尽量低。
(1)均流电抗的感量越大,桥臂间的耦合越弱,越不容易发生环流现象;
(2)桥臂的结构对称性越好,均流电抗感量要求越低;
(3)两桥臂的PWM脉冲同步性越好,均流电抗感量要求越低;
(4)驱动电路一致性越好,(例如门极电压数值),均流电抗感量要求越低;
(5)具体的感量数值的确定比较大程度上需要靠实验,可能的数值会在几uH到几百的uH的水平,根据应用不同而不同。
IGBT桥臂并联应用的其他实例:
下图分别是Buck电路和Boost电路的实例,都使用了桥臂并联的方式。这两种方式在实际中都比较常见。
不过这两种应用中电抗的主要目的不是为了均流,是为了输出电压的纹波水平,所以感量的选取有其他的约束条件。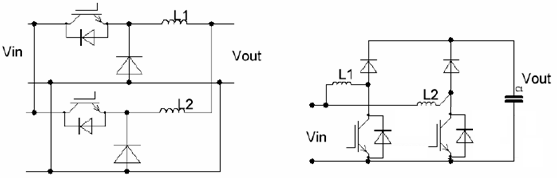
-
详解IGBT并联的技术要点(2)2025-01-21 2747
-
详解IGBT并联的技术要点(1)2025-01-16 2602
-
IGBT驱动器直接并联的优点和技术介绍2024-04-26 3814
-
IGBT的并联使用方法介绍2023-10-20 4850
-
如何通过设计确保IGBT并联均流措2022-02-18 4414
-
IGBT器件的大功率DCDC电源并联技术2021-09-22 1536
-
IGBT多并联双脉冲测试方法2020-06-28 1748
-
IGBT并联2019-06-18 2596
-
IGBT并联设计参考2018-12-03 11900
-
并联IGBT模块静动态均流方法研究_肖雅伟2017-01-08 806
-
IGBT并联技术分析2015-03-11 5974
-
基于IGBT并联技术的250kW光伏并网逆变器2011-08-22 1837
-
大功率IGBT模块并联均流问题研究2009-05-01 970
-
基于IGBT并联技术的大功率智能模块研制2009-02-07 640
全部0条评论

快来发表一下你的评论吧 !
