

 三轴加速度计LIS2DUX12开发(1)----轮询获取加速度数据
三轴加速度计LIS2DUX12开发(1)----轮询获取加速度数据
描述
概述
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
本文将介绍如何驱动和利用LIS2DUX12传感器,实现精确的运动感应功能。
LIS2DUX12是一款数字式智能3轴线性加速度计,其MEMS和ASIC旨在将尽可能低的电流消耗与丰富的特性(如常开抗混叠滤波、有限状态机 (FSM)、具有自适应自配置 (ASC) 的机器学习内核 (MLC))相结合。
FSM和MLC(带有ASC)为LIS2DUX12提供了始终可用的出色边缘处理能力。LIS2DUX12 MIPI I3C®从接口和嵌入式128级FIFO缓冲区构成了一系列功能,这让该加速度计在物料清单、处理能力和功耗上成为系统集成方面的参考。
LIS2DUX12具有±2g/±4g/±8g/±16g的用户可选满量程,并且可通过1.6 Hz到800 Hz的输出数据速率测量加速度。
LIS2DUX12包含专用内部引擎,用于处理运动和加速度检测,包括自由落体、唤醒、单/双/三击识别、活动/休止,以及6D/4D方向。
LIS2DUX12采用纤薄的小型塑料平面网格阵列封装(LGA),可确保在更大的温度范围(-40°C至+85°C)内正常工作。
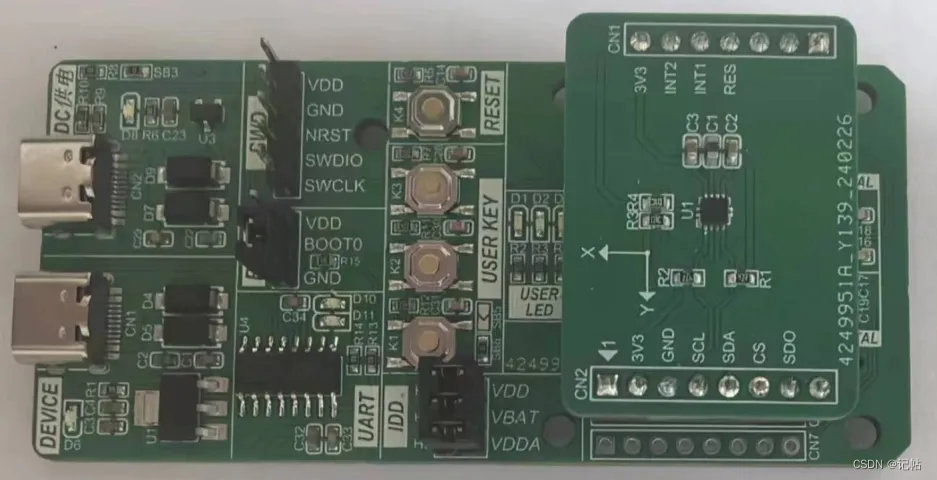
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。 主控为STM32U073CC,加速度计为LIS2DUX12
视频教学
[https://www.bilibili.com/video/BV1sr421G7ED/]
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源码下载
[https://download.csdn.net/download/qq_24312945/89197799]
通信模式
对于LIS2DW12,可以使用SPI或者IIC进行通讯。 最小系统图如下所示。

在CS管脚为1的时候,为IIC模式
 本文使用的板子原理图如下所示。
本文使用的板子原理图如下所示。

管脚定义

IIC通信模式
在使用IIC通讯模式的时候,SA0是用来控制IIC的地址位的。
对于IIC的地址,可以通过SDO/SA0引脚修改。SDO/SA0引脚可以用来修改设备地址的最低有效位。如果SDO/SA0引脚连接到电源电压,LSb(最低有效位)为’1’(地址0011001b);否则,如果SDO/SA0引脚连接到地线,LSb的值为’0’(地址0011000b)。

对应的IIC接口如下所示。 主要使用的管脚为CS、SCL、SDA、SA0。

速率
该模块支持的速度为普通模式(100k)到快速模式+(1M)。

生成STM32CUBEMX
用STM32CUBEMX生成例程,这里使用MCU为STM32U073CC。 配置时钟树,配置时钟为48M。

串口配置
查看原理图,PA9和PA10设置为开发板的串口。

配置串口。

IIC配置

配置IIC为快速模式,速度为400k。

CS和SA0设置

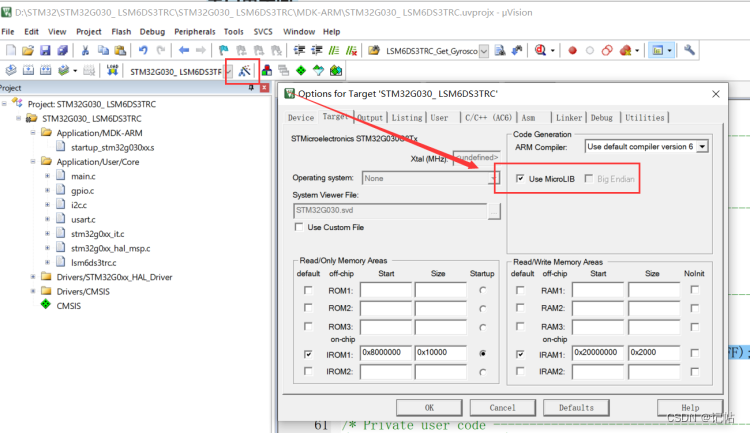
串口重定向
打开魔术棒,勾选MicroLIB
在main.c中,添加头文件,若不添加会出现 identifier "FILE" is undefined报错。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函数声明和串口重定向:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
参考程序
[https://github.com/STMicroelectronics/lis2dux12-pid]
初始换管脚
由于需要向LIS2DUX12_I2C_ADD_L写入以及为IIC模式。

所以使能CS为高电平,配置为IIC模式。 配置SA0为低电平。
HAL_GPIO_WritePin(GPIOC, CS_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, SA0_Pin, GPIO_PIN_SET);
获取ID
我们可以向WHO_AM_I (0Fh)获取固定值,判断是否为0x47。

lis2dux12_device_id_get为获取函数。

对应的获取ID驱动程序,如下所示。
printf("HELLOn");
HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET);
lis2dux12_status_t status;
stmdev_ctx_t dev_ctx;
uint8_t id;
lis2dux12_md_t md;
/* Initialize mems driver interface */
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.mdelay = platform_delay;
dev_ctx.handle = &SENSOR_BUS;
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
lis2dux12_exit_deep_power_down(&dev_ctx);
/* Check device ID */
lis2dux12_device_id_get(&dev_ctx, &id);
printf("LIS2DUX12_ID=0x%x,id=0x%xn",LIS2DUX12_ID,id);
if (id != LIS2DUX12_ID)
while(1);
复位操作
可以向CTRL1 (10h)的SW_RESET寄存器写入1进行复位。

lis2dux12_init_set为重置函数。 对应的驱动程序,如下所示。
/* Restore default configuration */
lis2dux12_init_set(&dev_ctx, LIS2DUX12_RESET);
do {
lis2dux12_status_get(&dev_ctx, &status);
} while (status.sw_reset);
BDU设置
在很多传感器中,数据通常被存储在输出寄存器中,这些寄存器分为两部分:MSB和LSB。这两部分共同表示一个完整的数据值。例如,在一个加速度计中,MSB和LSB可能共同表示一个加速度的测量值。
连续更新模式(BDU = ‘0’):在默认模式下,输出寄存器的值会持续不断地被更新。这意味着在你读取MSB和LSB的时候,寄存器中的数据可能会因为新的测量数据而更新。这可能导致一个问题:当你读取MSB时,如果寄存器更新了,接下来读取的LSB可能就是新的测量值的一部分,而不是与MSB相对应的值。这样,你得到的就是一个“拼凑”的数据,它可能无法准确代表任何实际的测量时刻。
块数据更新(BDU)模式(BDU = ‘1’):当激活BDU功能时,输出寄存器中的内容不会在读取MSB和LSB之间更新。这就意味着一旦开始读取数据(无论是先读MSB还是LSB),寄存器中的那一组数据就被“锁定”,直到两部分都被读取完毕。这样可以确保你读取的MSB和LSB是同一测量时刻的数据,避免了读取到代表不同采样时刻的数据。
简而言之,BDU位的作用是确保在读取数据时,输出寄存器的内容保持稳定,从而避免读取到拼凑或错误的数据。这对于需要高精度和稳定性的应用尤为重要。
可以向CTRL4 (13h)的BDU寄存器写入1进行开启。

对应的驱动程序,如下所示。
/* Set bdu and if_inc recommended for driver usage */
lis2dux12_init_set(&dev_ctx, LIS2DUX12_SENSOR_ONLY_ON);
设置传感器的量程
FS[1:0] - 全量程选择:这两个位用于设置传感器的量程。量程决定了传感器可以测量的最大加速度值。例如,量程可以设置为±2g、±4g、±8g或±16g。这允许用户根据应用的特定需求调整传感器的灵敏度。



对应的驱动程序,如下所示。
/* Set Output Data Rate */
md.fs = LIS2DUX12_4g;
md.odr = LIS2DUX12_25Hz_LP;
lis2dux12_mode_set(&dev_ctx, &md);
轮询获取加速度
检查新数据是否可用:
lis2dux12_status_get(&dev_ctx, &status);这个函数调用检查加速度计是否有新的数据可读。如果有新数据,status.drdy变量将被设置为非零值。
主要为读取STATUS (25h)的DRDY位。

如果status.drdy是非零的,说明有新的加速度数据可读。
lis2dux12_xl_data_get(&dev_ctx, &md, &data_xl);这个函数调用实际读取加速度计的原始数据,并存储在 data_xl 数组中。


/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* Read output only if new values are available */
lis2dux12_status_get(&dev_ctx, &status);
if (status.drdy) {
lis2dux12_xl_data_get(&dev_ctx, &md, &data_xl);
/* print Accel data */
printf("Acceleration [mg]:%4.2ft%4.2ft%4.2frn",
data_xl.mg[0], data_xl.mg[1], data_xl.mg[2]);
lis2dux12_outt_data_get(&dev_ctx, &md, &data_temp);
/* print Temp data */
printf("Temp[degC]:%3.2frn",
data_temp.heat.deg_c);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
演示

审核编辑 黄宇
- 相关推荐
- 热点推荐
- 传感器
- 加速度计
- stm32cubemx
-
加速度计LIS2DW12开发(1)----轮询获取加速度数据2026-06-02 695
-
LIS2DUX12:面向可穿戴与物联网的超低功耗智能加速度计2025-10-29 862
-
e2studio开发三轴加速度计LIS2DW12(1)----轮询获取加速度数据2024-08-09 3268
-
三轴加速度计LIS2DUX12开发(2)----静态校准2024-05-17 3079
-
三轴加速度计LIS2DW12开发(4)----测量倾斜度2024-05-16 3818
-
两轴加速度计和三轴加速度计的使用区别?2023-12-29 1177
-
三轴加速度计LIS2DW12开发(2)----基于中断信号获取加速度数据2023-12-18 3303
-
AI增强型智能加速度计2023-07-12 1954
-
贸泽开售面向可穿戴和始终感知应用的STMicroelectronics LIS2DUX12和LIS2DUXS12智能加速度计2023-06-02 1365
-
设计具有成本效益的加速度计2022-08-23 1503
-
请问两轴加速度计和三轴加速度计的使用区别是什么?2018-08-08 7060
全部0条评论

快来发表一下你的评论吧 !
