

基于DSP的嵌入式数字摄像夜间能见度测量系统
处理器/DSP
描述
摘要:数字摄像夜间能见度仪的关键技术之一在于高速、实时地处理CCD采集的目标光源和黑体的图像信息。设计了一种基于TMS320DM642的小型化、便携嵌入式能见度测量系统,从硬件和软件上给于实现,并将其应用到数字摄像夜间能见度测量中。利用CCD采集25帧/s的PAL制视频流,数字化后送入DSP处理器,通过DSP实现目标光源与黑体的图像分割与定位算法,完成数字摄像夜间能见度的测量。实验结果表明设计的嵌入式系统能较好完成夜间能见度的测量。
关键词:DSP;图像处理;夜间能见度;嵌入式系统
0 引言
能见度是气象观测中的重要参数,其对于航空航天、铁路、公路等具有重要的应用价值。数字摄像法是根据能见度定义以及人眼视觉阈值效应自动获得能见度值的,是一种较为新型的探测能见度的方法。其基本思路是通过直接处理摄像机(CCD)摄取的选定目标物的图像,分析亮度信息来获得能见度数值。文章研究了双光源摄像法夜间能见度测量方法,设计了基于DSP的小型化嵌入式系统,从硬件和软件设计两方面
对系统进行了研究,实现了夜间能见度的计算。实验结果表明该系统可以用于夜间能见度的观测。
1 数字摄像法探测夜间能见度原理
采用双光源法开展夜间能见度探测的原理如图1所示。
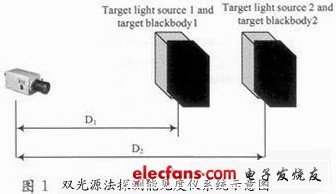
双光源法是基于比尔-朗伯定律,通过图像灰度信息得到光源与黑体的视亮度衰减,进而反演大气消光系数来计算能见度的一种方法。获得的大气消光系数为:

式中:分别为光源1,2,黑体1,2的视亮度;D1和D2分别为光源1,2距摄像机的距离。
再根据人眼视觉阈值效应得到能见度值为D=ln(1/0.02)/σ。
2 嵌入式系统硬件设计
2.1 系统总体方案设计
系统其主要由目标光源与黑体、摄像机和信号处理平台组成。信号处理平台完成信号的图像采集、分割与能见度计算功能。本文设计了一套以TMS320DM642为核心,结合CY37064P100,TVP5150PBS,SAA7121,DMT32240T035_01WN的图像实时采集与处理平台。该平台完成图像的采集与分割定位的处理,目标光源与目标黑体的视亮度以及能见度值的计算。图2为系统模块结构图。
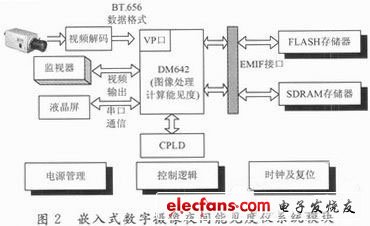
采用PAL制式的摄像头提供25帧/s的视频流。CCD采集图像并通过视频解码芯片将输入视频流转化为8位ITU-R BT.656格式视频数据,经过DSP图像处理得到能见度的数值。再通过DM642扩展的串口通信电路与带串口的液晶屏通信,把能见度数值显示在液晶屏上。同时视频编码芯片将DSP处理后的BT.656格式的视频数据转化为PAL制式的视频信号,通过监视器显示处理后的目标光源和目标黑体的图像。
2.2 嵌入式信号处理系统硬件设计
2.2.1 视频采集模块
采用8位模拟工业摄像机直接摄取PAL制的视频图像,送入视频解码器。解码后输出ITU-R BT.656格式数据。解码器采用高性能、封装小(32脚TQFP)、功耗小(小于150 mW)的TVP5150PBS,将PAL视频信号转换成数字色差信号(YUV 4:2:2)。图3为视频解码模块与DSP接口图。
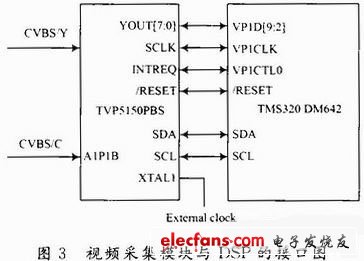
在外部视频输入(0~1 Vpp)与TVP5150PBS视频输入之间设计分压电阻网络来使得TVP5150PBS的输入电平为0~0.75 Vpp.
系统设置视频口VP1的A通道作为视频输入口。TMS320DM642的I2C接口实现对TVP5150芯片内部寄存器的初始化和配置。TVP5150芯片的SCL,SDA引脚分别与TMS320DM642时钟、数据地址线相连,通过SCL,SDA的时序配合完成DSP向视频解码器芯片寄存器写入和读出数据。TVP5 150接收摄像机的视频信息,经过解码后的数据串行输出。数字视频流包含奇偶场指示信号FI、场同步信号、行同步信号、像素时钟、YUV数据输出等元素,数据率约165 Mb/s.
2.2.2 图像处理模块
系统采用TI公司的面向数字媒体应用的32位定点DSP芯片TMS320DM642完成信号处理的过程。TVP5150输出的BT.656视频流经过TMS320DM 642的视频口后存入2 560 B的VP1A通道FIFO.由于图像数据量大,需要外扩片外存储器用于存放图像数据信息。通过EDMA通道把FIFO中的数据搬入片外存储器SDRAM.当视频口VP1的A通道出现视频Y,U,V分量数据搬运请求后,在程序中便会触发EDMA处理函数,完成FIFO数据向SDRAM的搬运。VP1EVTYA,VP1EVTUA,VP1EVTVA分别为发生在VP1A通道上与视频Y,U,V分量相关的事件,与DM642 EDMA对应通道相连。当FIFO向SDRAM搬运完数据后运行在FLASH中的程序开始调用图像数据,进行算法处理,求取光源和黑体的亮度值,完成能见度的计算。
2.2.3 视频显示模块
视频显示部分通过视频编码芯片把BT.656格式的视频数据转化为PAL制式的视频信号,然后送入监视器显示处理后的目标光源和目标黑体图像。采用SAA7121H编码器,将TMS320DM642的VP0 A通道设置为视频输出口。图4为视频编码模块与DSP连接图,CVBS_OUT为解码输出的复合视频。与TVP5150一样,SAA7121芯片内部各个寄存器的配置通过TMS320DM642的I2C接口配置,且可以与TVP5150共用TMS320DM642的I2C总线。
2.2.4 串口通信模块
系统在DSP外部通过CY37064P100和TL16C752B扩展串口通信电路实现主芯片与带串口液晶屏之间的通信,将夜间能见度值显示在液晶屏上。图5为串口通信模块设计图。选择串口液晶屏实现能见度数值的显示和历史曲线的绘制。
3 嵌入式系统软件设计
3.1 基于DSP/BIOS和RF5系统软件设计
DSP/BIOS是基于CCS的一个嵌入式操作系统,其多线程机制可以方便进行多任务应用程序的编写。与传统的汇编语言和C语言编写的DSP程序相比,DSP/BIOS可以有效地提高代码执行效率,利于行代码执行情况的实时监控。RF5是基于DSP/BIOS的应用程序设计框架,实现存储管理、线程模型和通道封装。运用RF5参考框架可以大大缩短开发者的难度和时间。根据系统需要,在基于RF5参考框架上进行嵌入式软件的编写,图6为软件程序流程图。

各个处理任务之间采用SCOM消息机制进行通信。图像采集任务采集数据后,通过SCOM消息传输给处理任务;处理任务对图像进行相关的处理及能见度计算后,通知采集任务进行下一次的采集处理,并将处理的结果传给输出任务进行显示。同时,处理任务协调该任务和其他两个任务之间的通信。
3.2 能见度计算的图像处理算法研究
能见度计算任务是DSP嵌入式软件的核心,其图像处理方法是系统可靠性的关键。数字摄像夜间能见度仪通过图像处理计算两相同亮度光源经过不同距离衰减之后的目标光源视亮度,根据视亮度反演大气消光系数完成能见度值的测量。其图像处理过程主要分为图像预处理、图像分割与定位、能见度值的计算三部分。
3.2.1 图像预处理
图像预处理主要对采集的光源图像进行图像滤波处理,以达到去除背景噪声和杂散光等的影响,使目标光源和黑体图像亮度均匀。由于该系统的能见度仪主要安装在高速公路上用于能见度预警,在低雾、雨天等天气条件下,图像的清晰度不高。另外CCD在图像采集和传输图像的过程中也会产生相应的噪声污染。因此,需要对图像进行预处理。
采用了频域增强法使得图像清晰化。对图像进行傅里叶变换,在频域进行滤波处理,再将滤波后的图像反变换到空间域,从而获得增强后的图像。另外利用小波变换在信号去噪和数据压缩领域的良好效果,采用小波阈值去噪法。基于信号和噪声频率和幅值不同,对图像进行二维小波变换,根据图像原始信息和噪声小波变换系数的差异,设定阈值去除小波系数中的噪声元素,用经过处理的小波系数进行二维小波反变换得到去噪后的图像。
3.2.2 图像分割与定位
数字摄像法测量夜间能见度关键在于准确地提取出图像的亮度信息。在亮度的计算过程中,准确地分割出光源图像是计算过程中的关键。简单的阈值分割易造成误判,影响能见度的计算。图像分割研究合适的适合两个目标光源和黑体的分割算法,取光源中亮度比较均匀的部分作为光源和黑体的亮度值。
选择合适的USAN区域,利用SUSAN边缘检测算子,进行图像的边缘检测。根据所得到的边缘进行图像的分割,得到光源二值图像。取正方形的模板在光源部分进行亮度值搜索计算,求出方框内亮度最大的区域,以此区域作为光源的亮度值。再根据图像尺寸与对应像素个数的关系,求出黑体的位置,进行黑体亮度值的计算。图7显示了从图形分割到定位的过程。

3.2.3 能见度值的计算
通常能见度的变化实时性要求不高,可根据DSP计算的效率,每取100张图叠加求平均亮度,再将计算出的目标光源和目标黑体的亮度值分别代入消光系数σ和能见度D计算公式,完成能见度的计算。
4 实验效果分析
实验选择合肥董铺岛观测场地进行能见度实验,实验中采用100帧图像进行平均来求取亮度值。图8为嵌入式系统计算能见度值通过串口液晶屏的显示。
实验根据合肥6月天气情况,取19:30到第二天的5:00为夜间,测量能见度。图9为2012年6月8日至6月12日的测量结果。从测量结果可以看出数字摄像夜间能见度仪同前向散射能见度仪有几乎完全相同的变化趋势,最大相对标准误差为15%,满足世界气象组织关于标准能见度仪误差小于20%的规定。
5 结语
本文设计的基于DSP和CPLD的数字图像处理平台的设计方案应用到数字摄像夜间能见度测量中可以得到图像的实时显示与能见度的计算。采用的图像分割与定位算法可以获得较小的亮度误差,能见度值也与人工观测值十分接近,误差在可接受的20%内。该系统具有可靠性高、实时性强、速度快等特点,经实验验证满足数字摄像夜间能见度测量的要求,理论上可以应用到夜间能见度的观测当中,可以作为后期研发的平台继续开展数字摄像夜间和白天能见度方面的探测。
- 相关推荐
- 热点推荐
- TMS320DM642
- SAA7121
- TVP5150PBS
-
透射式能见度测量装置系统电路设计 —电路图天天读(60)2014-12-04 2508
-
一种简易的透射式能见度测量装置的设计方案2014-01-16 3097
-
怎么设计嵌入式系统的自适应前照灯系统?2019-08-29 1674
-
如何设计嵌入式数字摄像夜间能见度测量系统?2019-10-30 1637
-
微型机在前向散射式能见度激光测量系统中的应用2009-06-12 540
-
能见度传感器Model 60002011-01-09 847
-
采用Cortex-M3及RTOS控制的散射式大气低能见度仪的设计方案2018-11-14 3726
-
如何使用DSP进行嵌入式温度测量系统设计与实现资料说明2019-04-24 1269
-
基于DSP和CPLD的嵌入式数字摄像夜间能见度测量系统设计浅析2019-04-26 1468
-
NJD-2型能见度传感器说明书2021-10-19 1106
-
能见度监测仪是什么,能见度监测仪的介绍2021-12-15 3362
-
潜水员能见度传感器开源案例2022-11-28 840
-
能见度传感器_气象能见度感应传感器2022-12-29 1251
-
能见度传感器参数及功能原理介绍2023-01-30 3272
-
无人机红外成像在夜间和低能见度环境下的应用2024-01-24 1748
全部0条评论

快来发表一下你的评论吧 !
