

2012上半年最受工程师欢迎鬼才机器人DIY
嵌入式新闻
描述
一、WIFI机器人DIY设计
在经历了十多天的疯狂淘宝、组装、调试、拆卸、再组装、再调试的过程后,我的Wifi Robot终于面世!!泪流满面!下面简单写写制作过程,也好给自己留个存档。
俺用的方案是igee论坛的wifi小车方案,驱动板与控制程序都是现成滴……不过现在发现吃现成的虽然方便,但是扩展功能却少得可怜。下一步打算买块arduino板自己研究一下重新组装小车,自己写写程序什么的。
Wifi Robot,顾名思义就是通过wifi无线网控制的机器人,比起普通的遥控车遥控机器人来,它的好处就是遥控信号覆盖范围可以做到很广,也可以通过互联网远程遥控,这样的话就可以派生出很多新的应用,比如视频监控等等。因为是新手初学,机器人的外形和功能上还比较粗糙,高手看到了不要笑话~
1.准备工作
罗列一下零件清单:
亚克力车架×1:65元
igee小车驱动板带5110屏×1:150元
超声波传感器×1:40元
大亚DB120-B1无线路由×1:45元
301芯片摄像头×5:第一次买的一个10块,让我把线扯断了焊不上了,废弃。第二次买的一个10块,又坏了……第三次买了仨,每个5块。至今正常。合计35。
广角镜头×1:5.3元
辉盛M995舵机×2:70元
舵机云台支架×1:32元
步进马达套件×4:144元
12V4800mAh锂电池:87元
杜邦线螺丝螺帽等等配件若干……
合计:673.3元
由于是第一次进行机器人制作,工具基本没有,光买电烙铁热熔胶枪电钻万用表就花了不少钱。加上乱七八糟的花销,总共1200+。一个多月的生活费没了……
二、WIFI/3G太阳能机器人DIY设计
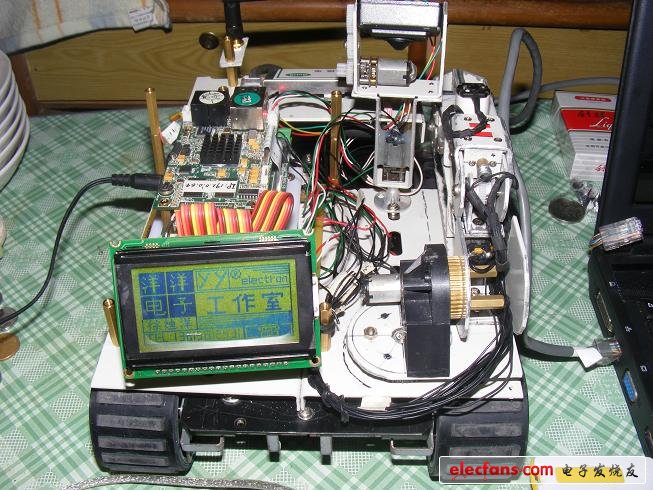
这个四轮驱动机器人的底盘完全由手工打造,无论是轮子还是底盘,大家可以看看图哦
将最近做的一个基于WIFI,3G控制的四轮驱动机器人拿出来与大家分享一下!
轮子是由一个铝合金外罩,内部嵌入钢轮,再连接减速电机,轮子的外面很清晰的可以看是有橡胶用502粘起来,效果不错哦。

下面介绍一下机器人的功能:
这是一个无线远程端控制型四轮驱动机器人,带有水平垂直控制云台,云台上搭载一个豆干摄像头,3.6MM镜头,可以看到较广的视野。3度机械手,可以实现较难度的控制,
搭载一个12864控制显示液晶模块。
三、外国牛人DIY超声波传感器检测避障机器人(图文)
电子发烧友网讯:这是我做的第一个机器人,我会详细记录下每个程序,以方便那些初学者借鉴,准确说来我做的是一个履带式的,由picaxe28x1控制,超声波传感器检测的障碍物躲避机器人。
首先我焊接了一个排烟装置。这个风扇我是从一个报废的笔记本上拆下来的,我把它通过一个盒子将其连接到一个碳纤维金鱼缸过滤器上,之后接上电池盒。
因为我是用F/F跳线连接模块的,因此我需要焊接出相关的针脚,我会在picaxe上面额外添加一些插针,需要注意的是要注意针脚焊接的准确位置和角度。
因为HC-SR04超声波传感器明确的额定电压是5V,而picaxe28X1也是在5V的电压下工作状态才是最佳的,同时我们用到的电机L294D的需要,因此我还做了一个5V的电压调节器去保证超声波传感器免受电压波动影响。这样就可以保证我们机器人模组能工作在一个很稳定的电压状况下。具体做法就是我用一个工作电流1A的,5V固定电压调节器,并将其连接到6个AA电池去提供一个7.2V输入,5V输出的电压。
四、国外牛人DIY超声波导航坦克机器人(图文)
电子发烧友网讯:下面给大家介绍一个超声波导航机器人,总共花费了35美刀,为了做着玩意我用了五个小时。下面就是我用到的材料:
六个雪糕棒(有才吧)+木胶
一个老旧的坦克套装
两个改良的迷你伺服电机
需要注意的是你需要把微调筒、电位计那些东西留在电机盒子里,因为这些事被用作一个齿轮轴,同时它可以在附近的路上旋转,之后拆焊引线,用2个330欧姆的电阻替换电位计。
超声波传感器HC-SR04一个和一个用来实现平移的迷你电机
PICAXE 08M2处理器
pin0:触发HC-SR04和平移电机,同时在线上接上330欧姆电子
pin1:还不能转移到pin0
pin2:改良过的电机1和330欧姆电阻
pin3:HC-SR04
pin4:改良电机2+330欧姆电阻
供电使用外接电源,因此没有电池、
因为这是我第一个利用Pic Axe 08m2制作的机器人,因此我打算把它尽可能做小一点。
有更多的程序空间,通过程序我可以让它实现怎样的功能?请拭目以待。。。
五、DIY奇才造巨型电容锂聚合物电池动力机器人
电子发烧友网讯:制动器/输出设备:2个小齿轮式马达
控制方法:全自动
CPU:PICAXE 08M2
电源:微型直升机的3.7V锂聚合物电池
传感器/输入设备:在底部和前进方向有两个以上的传感器
目标环境:室内,平面
Lumi做了一个很酷的移动性很好的小型 EL2ISA2 R2,因为它上面有一个能够发出噪音的迷你音频系统,这就促使我去建造一个自己的R2。
在我的作品上,我打算用一个ATtiny85 驱动一个简单的PWM音频回放电路,但到最后我发现我需要更在这个音频回放上面需要实现更多的控制。之后我就用到了SOMO-14D模块,因为它有着光滑细致的外形,我知道我需要更多的I/O去控制它。
这就导致我们需要用1pin去控制一个L293D芯片,而不是传统的4pin。白板上面的草稿就是我多次设计得出的结果。
我找了个一个很小的伺服电机。我还必须使它的头部转动。我做了一个555电路去给LU2的红蓝前灯一个随机信号。
在电池装在里面以后,我觉得有必要做一个充电插头,一个编程接口也是必须的,由于PICAXE会被直接固定在主板上。还需要加上一个电源开关。

这块白板,就是我创作的根源

大部分不焊接在电路板上的元件的合作。我不能使这个小舵机工作,我只好用了一个HobbyKing的3.7g舵机。
六、大型无人巡逻车DIY设计,可装载武器系统
最近刚自己设计,加工,制作的一种用于巡逻,抢险,救灾等功能的“大型无人巡逻车”系统。该车采用4个大功率电机驱动。配合控制板控制电机,垂直升降云台和30光学的一体化摄像机!利用WIFI进行远距离远程控制和自动巡航!后期可装机械手,烟雾弹,电击甚至是武器等系统进行抢险,防卫,攻击等功能!扩展性很强!下面看看我刚完成的大致结构!
整车的机构采用钢架结构,钢的韧度,强度高。在颠簸的道路上不容易损坏!


云台采用铁板构架,利用减速电机做简单的云台结构,配合垂直升降,可升高30cm的高度。由于减速电机的工作电流小,最大200MA,比起步进电机,它的成本低,功耗小,重量轻等优点,比起舵机,如果该车采用舵机得购买大扭矩舵机,这样的舵机价格高,一般一个大舵机要好几百RMB。云台可实现水平360 度旋转,垂直180度旋转,水平垂直混合运动!
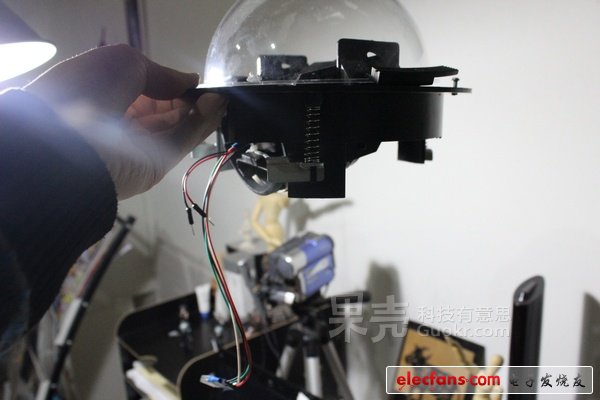
七、工程师自制蓝光呼吸WIFI机器人
你是否在新闻中见过各式各样的遥控机器人?它们上天入地,排爆侦查,几乎无所不能。给再土气不过的无线路由换个“头脑”,装上“手脚”,它就能忠实执行茫茫网海另一端的指令,为不能亲身亲临的你拍下难得一见的场景。
首先需要解释一下什么是“Shy ”:
“Shy ”是一个采用LINUX开源系统-Openwrt制作的WIFI机器人,它支持PC端,android端,web端的无线控制和无线视频传输,apple端的视频传输,甚至还可以当作你的电脑高清免驱动摄像头使用。
技术上来说,它大致分为三个部分,首先是加载Openwrt系统的Liunx平台,它连接摄像头,并通过WIFI接收控制命令。然后此平台通过串口连接单片机,再由单片机控制各种感应,驱动电路。你可以在手机上指挥它到处跑,然后拍下想要的照片。
值得注意的是,openwrt系统是开源的,我们可以在PC机上编译自己的openwrt系统和自己的软件,另外单片机的扩展应用成千上万,因此这架机器人具有相当高的可玩性与非常广泛的应用。
shy的原型来自于《star wars》中的R2D2。
机器人的主题是“呼吸”,缓慢变化的蓝光使它们成为你卧室中最酷的装置。

八、牛人工程师DIY火箭,成功发射进太空并回收!
火箭发射
火箭概念图

一个美国人手工制作一个火箭,成功发射到太空并按预定计划回收。全程多个第一视角视频,有声有色。原来火箭发射算不上什么高难度技术工种啊。
火箭内部分立电子器件及模块
火箭内部电子部件
一个美国人,Derek Deville,闲得无聊,在家自己做了一个小火箭,取名叫Qu8k。直径20厘米大小,4.25米长,约145公斤,连同控制器和推进器全套自制。
于2011年9月30日,Qu8k成功从内华达州Black Rock 沙地发射升空,在92秒内猛蹿到了36km 的高空,并成功落地回收。
九、人形机器人制作秘籍 全面还原DIY制作过程
如果你也不满足于简单的手工活,如果你也有一帮和你一样的兄弟,如果你们想创造和自己一样能走能爬的机器人,那么请关注这里,我们将分享机器人制作所需的全部秘籍,助大家一臂之力。
1 理论方面
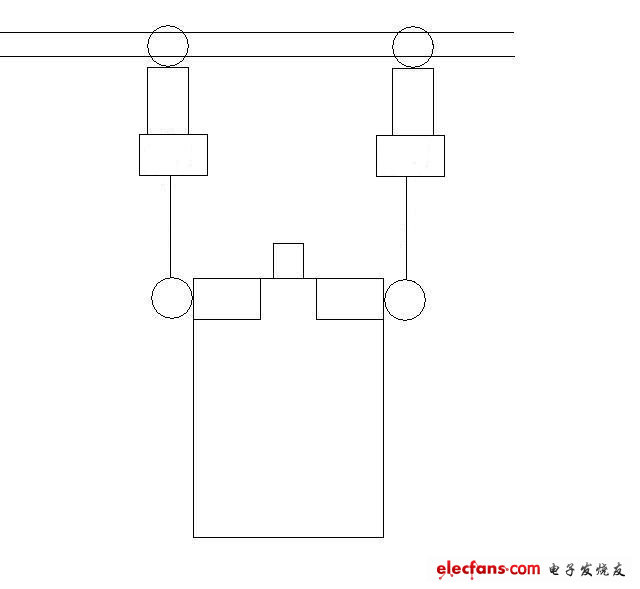
要让一个机器人能完成各种动作,高中的一些力学,运动学知识自然必不可少。在构建我们的机器人骨架过程中,主要的运动部件就是舵机了,整个机器人就是靠着舵机轴的转动来完成各种复杂的动作。在设计整体的结构时候,应该画出各种可能需要做的动作的结构简图(用点线表示)简单计算一下质心高度和位置保证机器人的平衡。
以下是具体的做法:
先把舵机看做一个质点,用点加一个小竖线表示舵机的转轴,直线表示两个轴之间的距离,大致画出整体静态草图。(两点之间的距离至少要大于舵机的高)
画出所需完成动作的分解草图,将所有运动都分解为绕给定轴的转动,如果发现有哪些动作无法完成考虑:1.改变轴的排布,方向。2.增加轴
不考虑线的重量,只考虑舵机的重量,对每个草图分别计算各个过程中机器人的平衡状况。调整舵机间的长度
Tips1: 每种舵机都会有其尺寸,重量,扭矩,以及转速等说明。在使用舵机时,应该尽量减小垂直于舵机转轴的受力,不然容易烧坏舵机。
Tips2: 舵机只能转180度,在动作中务必排除需要超过180转动的情况
1.1 我们的大强要完成什么动作呢?
我们要让大强“飞”起来,作为一只金刚,单单飞似乎少了什么,为此我们给大强设计了《金刚》的路线,一路跋山涉水拯救MM(剧情见最后)
1. 四足行走
由于我们设计的机器人重点放在了手臂上面,故对腿部进行了简化。行走时采用对角两条腿交替前进的方式。前进腿(图中箭头标注)向前跨步的同时,支撑腿有一个后蹬的动作以实现行走——俗称“爬”
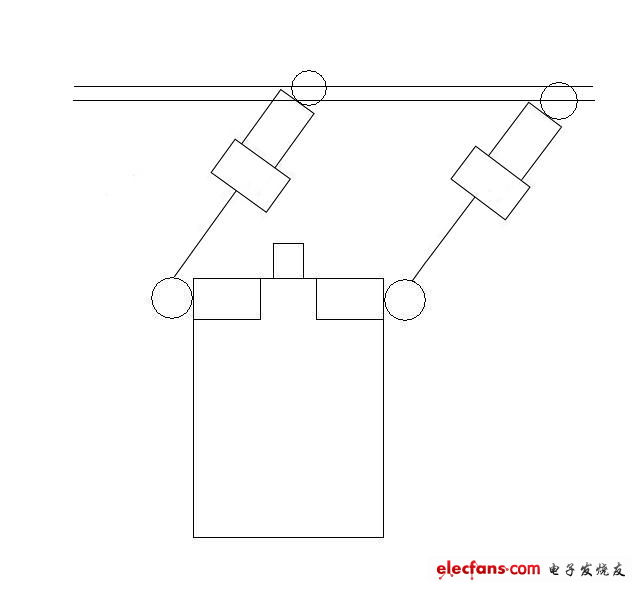
2. 多杠攀爬
这时的大强已经开始了艰苦卓绝的翻山越岭之路。
多杠连续攀爬并没有想象中那么简单,考虑到在前进时有一只手必须离开杠,为保持平衡,故采用左右静态摆动身体的姿态前进。
A. 开始时通过肩部舵机作用将重心移动到一只手上(图中为左手)
多杠攀爬动作图(1)
十、工程师DIY巨献:教你制作六足移动机器人
看了各种关于机器人的科幻片,你就没有想过自己做一个片中的机器人出来么? 实干派的DIYer可不是只会幻想的哟。PVC_Robot同学就用了廉价又好加工的PVC材料来制作了他的第一个六足机器昆虫,同时给出了非常详细的工具和材料获得方式。DIY党人要速度围观。
机器昆虫



偶然的机会,在网上看到这张图片,于是自己也有冲动作一只出来。
为了做出这个东西,自学了单片机,加上自己软件开发的基础,以及过去做模型积累的一些动手经验,有了后来的这个机器昆虫。
当然最后实际出来的东西,样子上和现在这个图片相去甚远,性能上也一般般,没办法,业余的,水平有限嘛。
-
 无限创意2017
2017-04-08
0 回复 举报非常好!值得学习! 收起回复
无限创意2017
2017-04-08
0 回复 举报非常好!值得学习! 收起回复
-
 yangg11g
2014-12-25
0 回复 举报mark 收起回复
yangg11g
2014-12-25
0 回复 举报mark 收起回复
-
2025年上半年工业机器人产量分析2025-08-20 1423
-
2021年最受工程师欢迎的技能:Python第一2021-06-30 1841
-
各大机器人公司上半年的产量如何2020-09-24 2643
-
2019年上半年工业机器人市场数据及发展趋势分析2019-08-03 2920
-
2018上半年各行业机器人的销量数据分析2018-07-28 6509
-
求硬件工程师一枚,苏州机器人公司,欢迎咨询~~~2016-03-16 4388
-
最受欢迎电子工程师鬼才DIY精华集锦TOP102014-08-14 83655
-
2014年上半年最热TI参考设计精选2014-07-04 2408
-
2012上半年网络高清监控摄像机市场概况(转载部分)2012-10-24 3424
-
DIY机器人系列:工程师自制蓝光呼吸WIFI机器人2012-08-27 34099
-
工程师电子制作故事:电子鬼才,仅用导线和晶体管DIY电脑2012-08-15 30702
-
嵌入式技术频道2012年上半年最受工程师喜爱热文Top202012-08-01 5532
-
电源管理频道2012年上半年最受工程师喜爱热文Top202012-07-26 10070
全部0条评论

快来发表一下你的评论吧 !
