

AGV导航精度怎么更准确?利用3D相机打造更智能的AGV辅助系统
电子说
描述
AGV
工业4.0不断优化流程和工作流,提高生产力和灵活性,从而节省时间和成本。机器人系统已经成为自动化处理的主要推动力。物联网(IoT)的存在让机器人越来越灵敏、自动、灵活且易于操作。越来越多的机器人成为工厂和仓库的日常帮手,智能图像处理在其中发挥着越来越重要的作用。
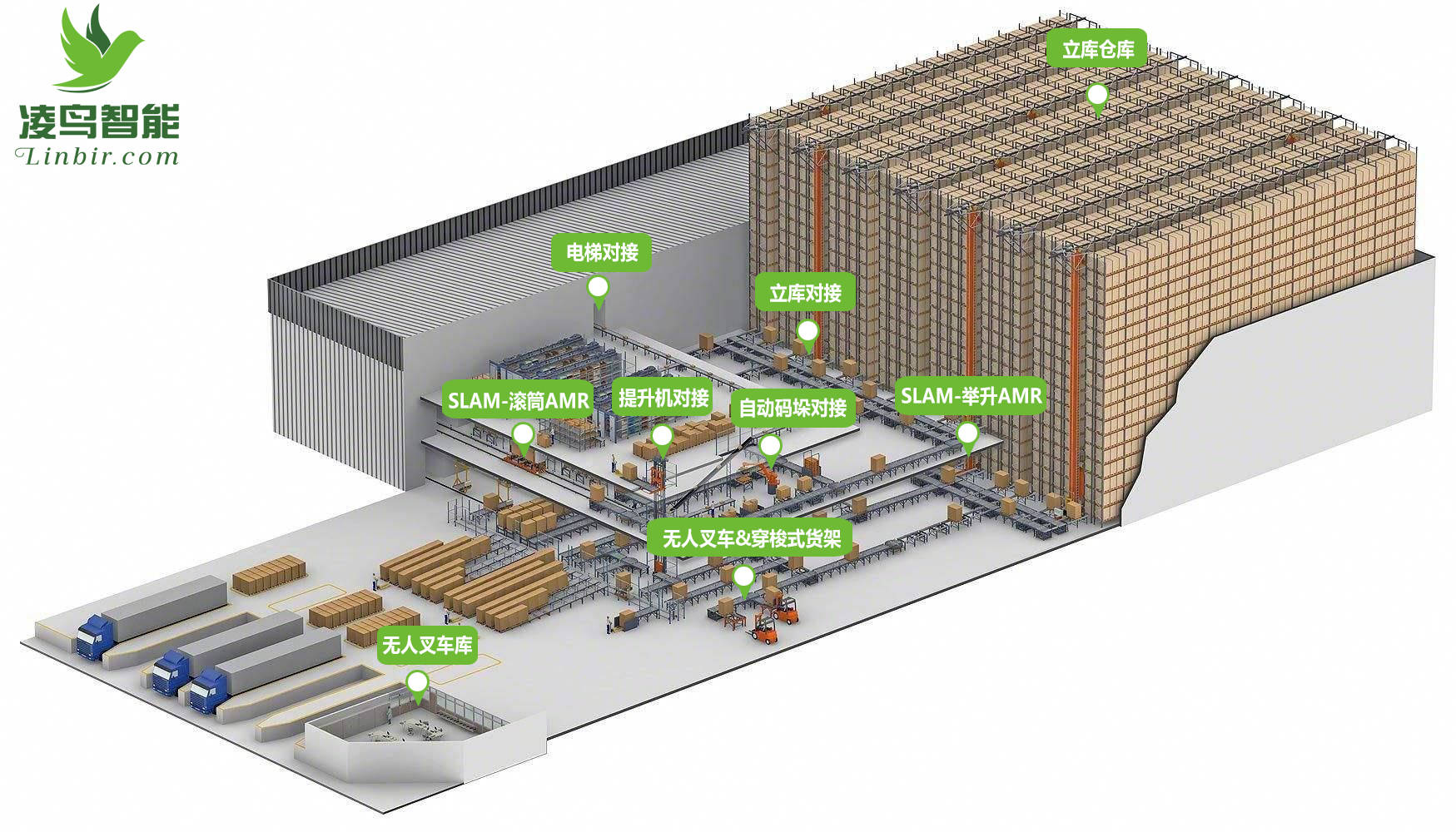
AGV智能仓储
即使在光线条件不足的情况下,相机上集成的投影仪也可以将高对比度的纹理投影到要捕捉图像的物体上,从而增亮无特征均质表面的结构。也就是说,集成相机完全满足要求。可用来打开一个或多个能展示图像和深度数据的立体和彩色相机。曝光时间、像素融合、AOI和深度测量范围等参数可以根据使用的匹配方法现场调整。

AGV小车
匹配过程能让3D相机通过投影到表面的辅助结构识别大量的像素信息,包括其位置变化,并从中创建完整的深度信息。而这又确保了智能机器人助手操作的精确度。从而可以使用机器人姿态轻松实现坐标平移或位移。
无论作为设备还是机器人,叉车的工作环境通常包含各种设备、物体甚至其他机器人。面对高精度、复杂的任务,3D相机通过获取深度信息,帮助AGV实现环境感知、地图构建、自主定位和运动规划等功能。

AGV叉车
除了自动导航,3D相机使工业叉车即使处于杂乱的仓库环境,也能精准识别货物托盘,避免因对接位置偏移角过大导致进叉失败。比如说,在自动化拆码垛的场景中,搭载3D相机的AGV通过将获取的信息传送至运动控制软件,搭配智能算法学习定位箱体的位置,就可应对垛形复杂多变,箱体种类繁多且随机的场景,提高货物分拣的效率和正确率。
随着5G、大数据、物联网、云计算等技术的发展,叉式移动机器人将不再仅仅是简单地把货物搬运到指定位置,而是成为一种实时感应、安全识别、多重避障、智能决策、自动执行等多功能的新型智能工业设备。
3D感知技术应用于各类AGV及低速无人驾驶领域,多传感器融合不仅可以为无人驾驶提供全方位避障解决方案,提升系统安全系数,而且可更好地感知环境,识别目标物体,并自动规划行车路线。
审核编辑 黄宇
-
AGV系统构成2015-12-22 6807
-
健永RFID技术在AGV站点导航定位及调度系统上的应用方案2017-05-17 4044
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8368
-
激光导航AGV的价格和国外的激光导航AGV大比拼!2017-07-31 7182
-
AGV行业水平的提高,产品标准化不可少2017-10-10 3124
-
AGV小车上的无线应用2018-09-05 2415
-
2019上海国际AGV小车展/中国仓储展/智能仓储展览会2018-10-14 1525
-
AGV激光雷达SLAM定位导航技术2018-11-09 10101
-
AGV的基本概念及基本结构组成2021-09-14 3071
-
AGV和AMR是什么关系?AGV采用了哪些关键的导航技术?2023-05-10 2647
-
户外场景中,AGV厂商如何选择托盘识别3D视觉方案2023-05-31 2160
-
利用3D相机打造更智能的AGV辅助系统2022-08-23 1424
-
更智能更柔性化,AGV导航方式的创新与演进!2024-04-02 1428
-
视觉系统辅助引导在激光导航AGV中应用2024-06-12 1481
-
AGV选型要点及步骤,保证企业选择的AGV小车更实用2024-06-24 1971
全部0条评论

快来发表一下你的评论吧 !
