

面向穿戴式和植入式应用的软体机械传感器综述
描述
生物力学信号(例如压力、应变、剪切和振动等)的穿戴式和植入式传感可以实现多种人体集成应用,包括皮肤上的生命体征监测、运动跟踪、体内器官状况监测以及缺失/受损机械感知功能的恢复等方面。这些传感器与人体皮肤和组织的机械适配性对于提高其生物相容性和传感精度至关重要。因此,近十年来,软体机械传感器的研发取得了重大进展。为了满足不同穿戴式和植入式应用的要求,软体机械传感器被赋予了各种额外特性,以使其更适合人体集成应用的各种环境。
据麦姆斯咨询报道,近日,美国芝加哥大学(The University of Chicago)的科研团队重点探讨了四种主要类型的软体机械传感器:压力、应变、剪切和振动(如图1所示)。该研究首先讨论了近期在材料和器件设计上的创新,以实现柔性与可拉伸性、生物可吸收性与生物可降解性、自修复性、透气性、透明度、无线通信能力以及高密度集成等重要性能。随后,总结了这类新型软体机械传感器在穿戴式和植入式应用中的研究现状,并在此基础上进一步提出了未来的研究需求。这篇综述以“Soft mechanical sensors for wearable and implantable applications”为主题发表在WIREs Nanomedicine and Nanobiotechnology期刊上,通讯作者为Sihong Wang。
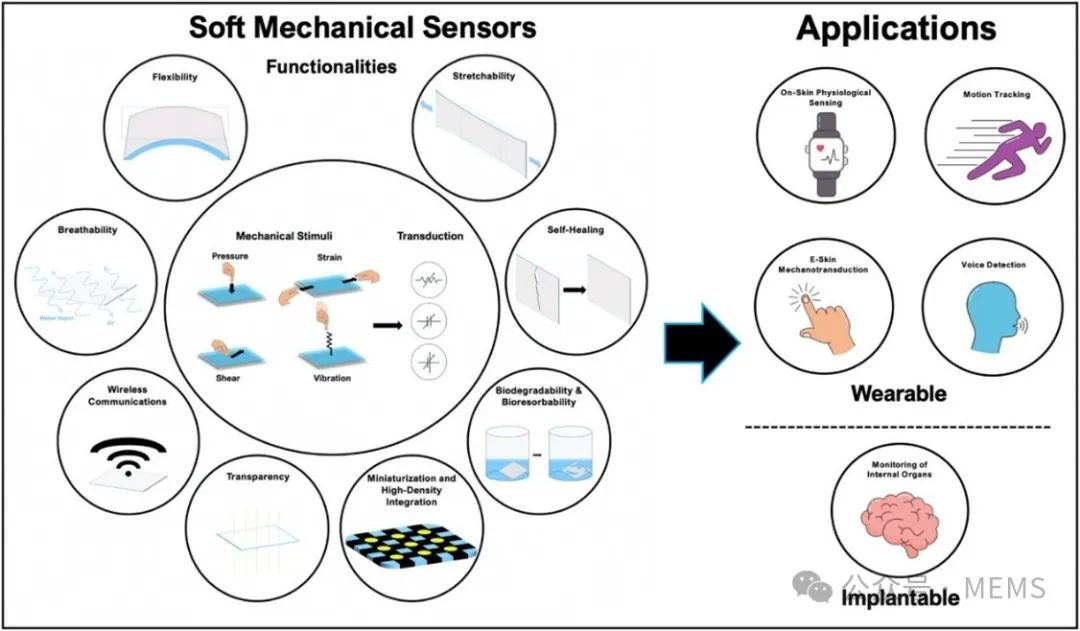
图1 各种类型的机械传感器和功能(左)以及与人体集成的应用(右)
软体机械传感器的主要类型
软体机械传感器主要有“压力、应变、剪切和振动”四大类型,不同类型的软体机械传感器的一般设计因素和策略各不相同(如图2所示)。
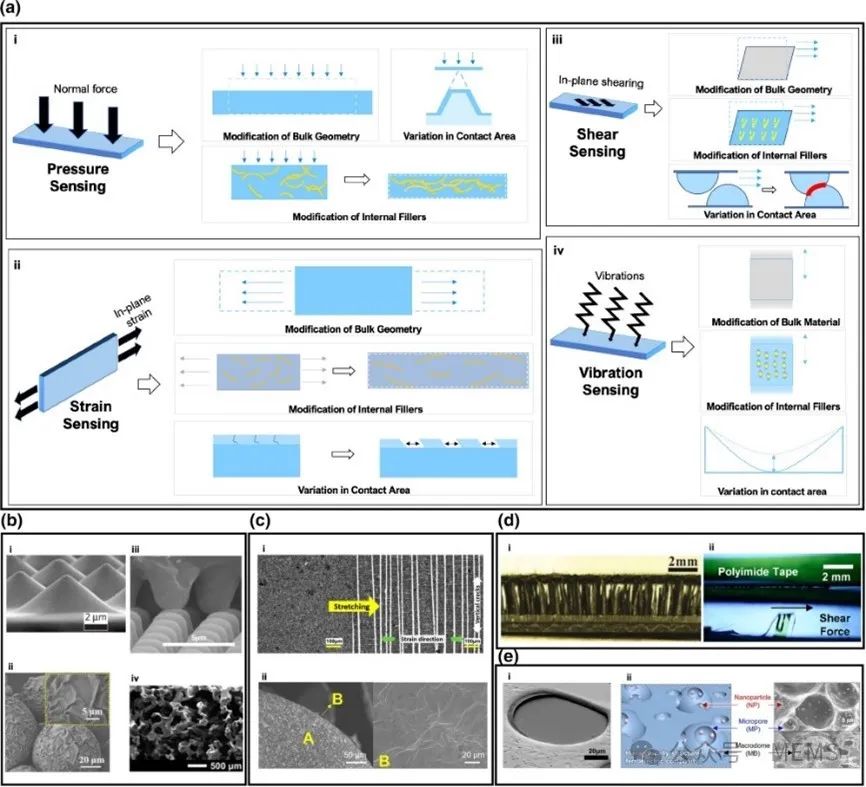
图2 四大类软体机械传感器的基本工作原理、设计特点以及其中微观结构示例
软体压力传感器:一般来说,软体压力传感器被设计成将沿法向轴的变形转换为电信号(读出信号)。在软体压力传感器中,通过使用低模量有机硅或中空/多孔结构,这种几何变化被进一步增强。
软体应变传感器:应变传感器将拉伸变形转换成电信号。它们主要用于运动跟踪、记录生命体征(如脉搏)和监测器官/组织的运作。应变传感器通过电参数的变化来响应面内变形。针对特定应用,应变传感器需要具有足够的拉伸性才能满足应变范围的检测要求。
软体剪切传感器:剪切传感器测量与表面相切的力。在人体应用中,它们通常被用于检测皮肤上的摩擦力。
软体振动传感器:振动传感器将高频且通常为低振幅的机械变形转换为电信号。生物电子学中常见的振动传感包括人声和触觉传感应用中的纹理传感。
赋予人体相容性特性
“在获得优异的传感性能的同时,实现人机界面应用所需的特性”是软体机械传感器开发的基本目标。
从柔性到可拉伸性:赋予传感器柔性和可拉伸性对于实现与动态曲线皮肤/组织表面的高度贴合、适应皮肤/组织变形,并最大限度地减少不适和组织损伤至关重要。相较于传统的刚性传感器,通过使用塑料或弹性体作为衬底、使用薄膜作为功能层(如电极)等方式,可相对容易地实现柔性(即可弯曲性)。
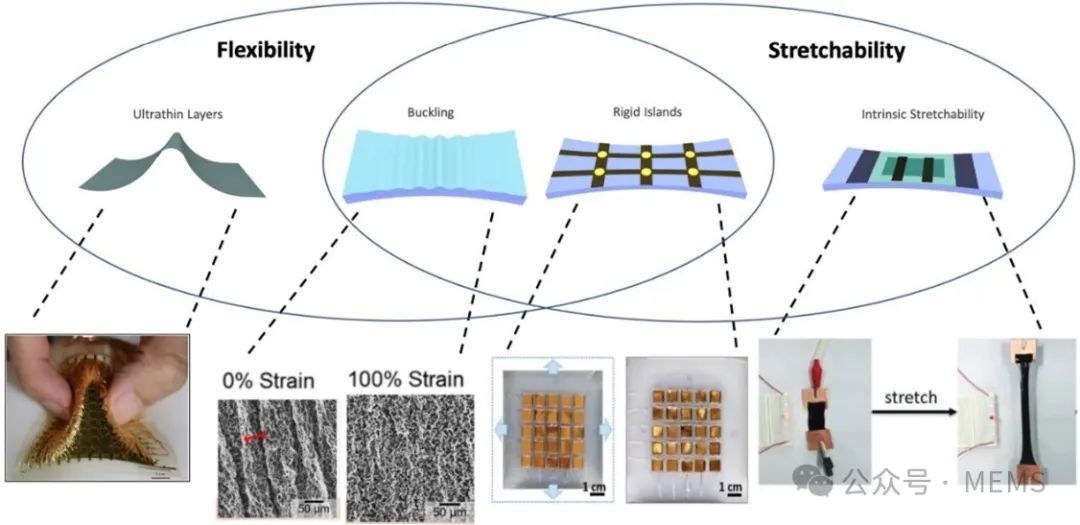
图3 实现柔性和可拉伸性的策略
生物可吸收性和生物可降解性:用于短期生理状态和术后监测的植入式传感是软体机械传感器的关键应用之一。因此,传感器在生理条件下降解成无毒物质的能力(即生物可吸收性),是一项非常重要的功能。
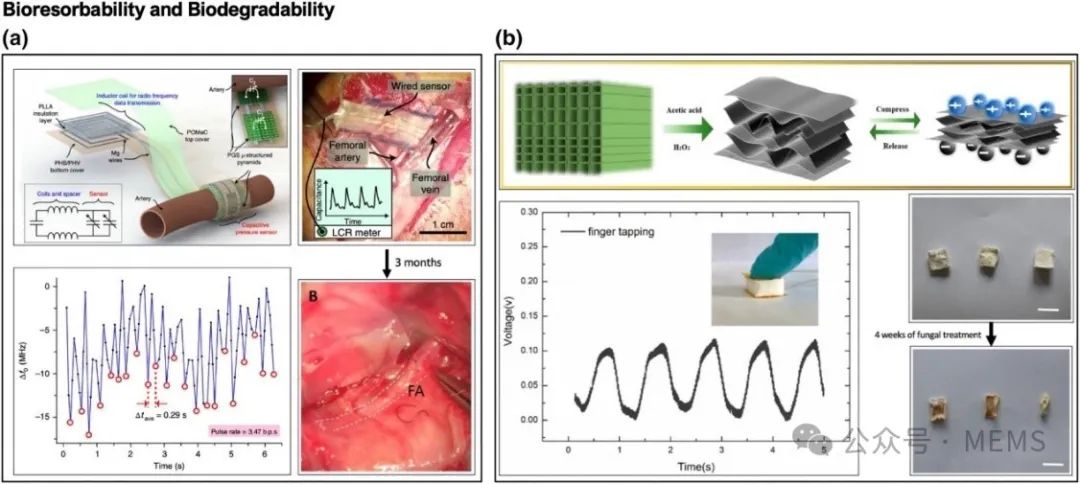
图4 生物可吸收和生物可降解的机械传感器示例
自愈性:赋予传感器自愈特性可以提升其抵御意外物理损坏的能力,并延长器件功能的持续时间。自愈性主要是通过使用能够进行可逆动态键合(如氢键合)的材料来实现的。
透气性:确保器件透气性对于最大限度减少佩戴穿戴式传感器引起的不适和皮肤刺激至关重要。具体而言,透气性是指传感器对空气和水蒸气的渗透性,以便汗液自由蒸发。传感器的透气性主要通过使用具有多孔形态(如纤维或海绵状结构)的传感器组件来实现。
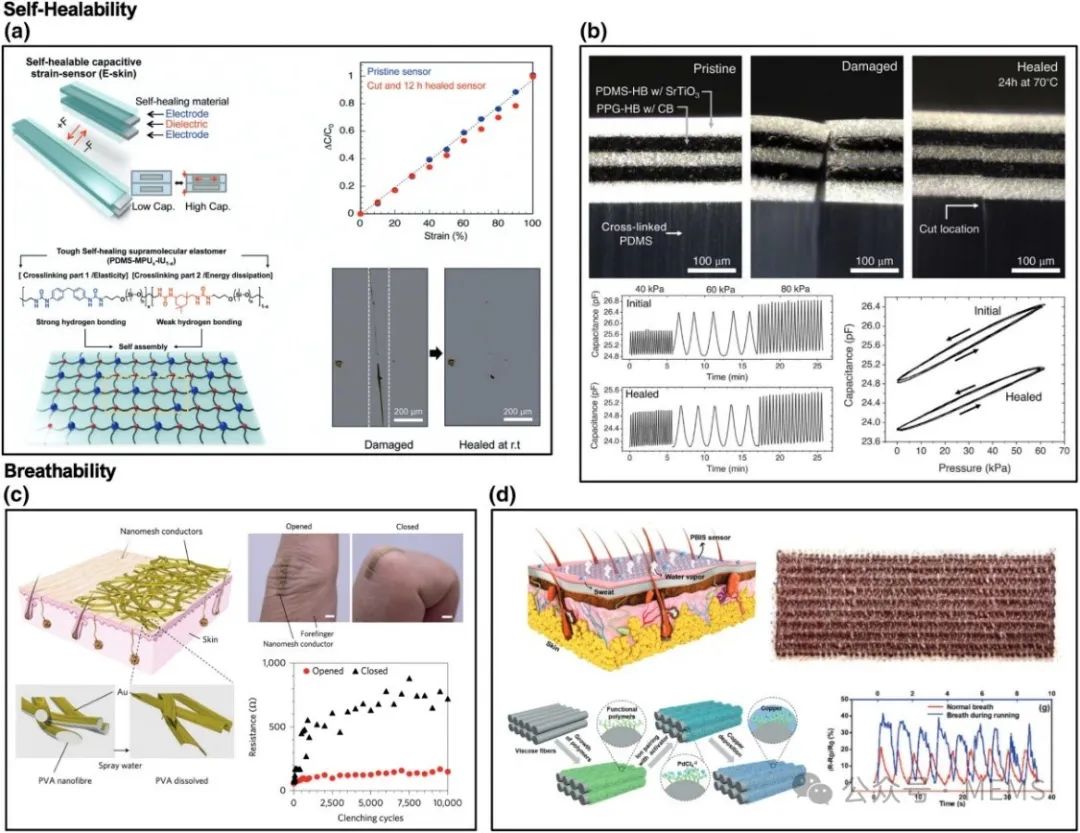
图5 具备自愈性和透气性的传感器示例
透明度:某些特殊应用需要透明传感器,例如具有眼压传感功能的智能隐形眼镜或用于测量运动或机械生理信号(如心率或呼吸速率)的隐形穿戴式传感器。机械传感器的有源层和衬底层的透明度是通过使用本质透明的材料以及高度多孔的网状结构来实现的。
无线通信:机械传感器的无线通信能力对于从穿戴式和植入式机械传感器中更便捷且连续地收集数据至关重要。已报道的无线通信方法包括蓝牙(Bluetooth)、近场通信(NFC)和射频识别(RFID)。
微型化和高密度集成:除了感知机械激励的大小外,机械传感器还需具备对其进行空间分辨映射的能力,这对许多应用(例如穿戴式触摸面板、假肢等)至关重要。这种特性在电子皮肤(e-skins)的压力传感环境中尤为重要,考虑到人体皮肤的高空间分辨率,传感器像素尺寸可能需要控制在1 mm -2 mm。
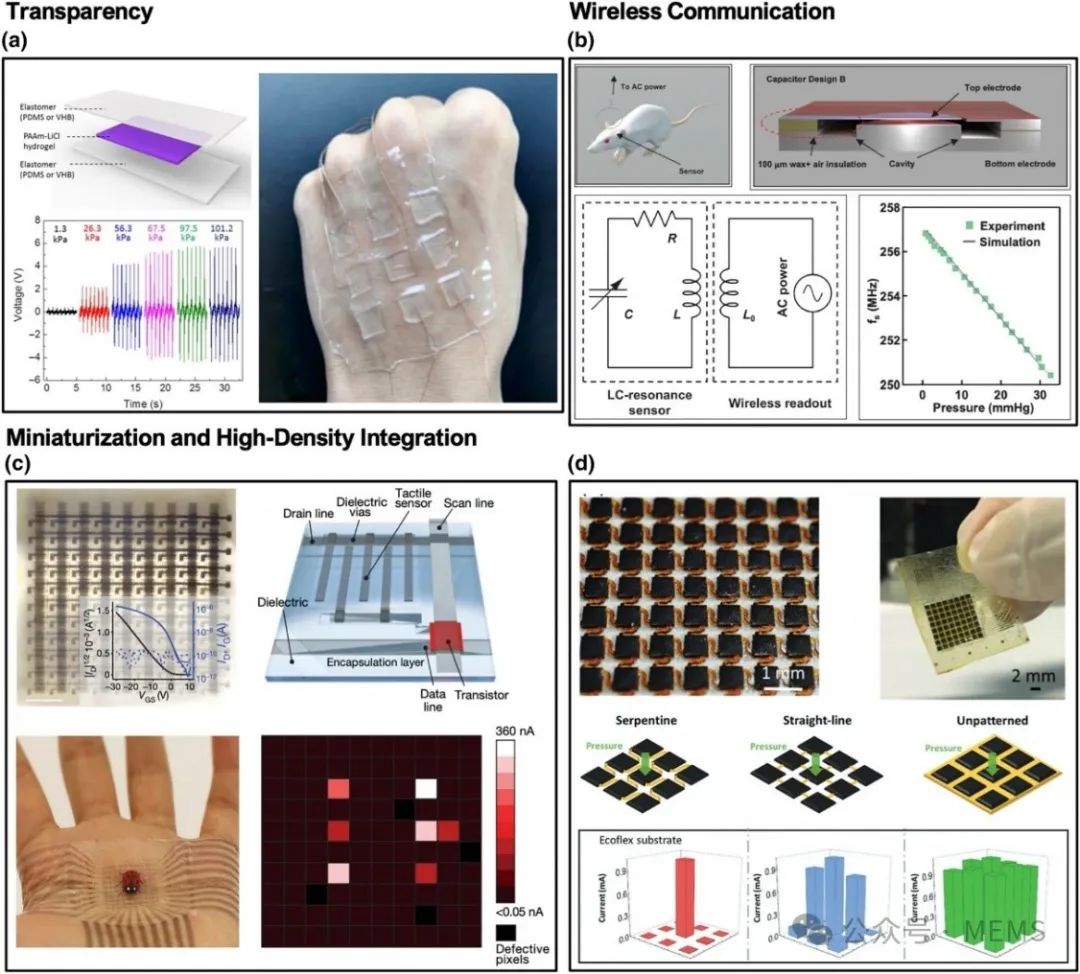
图6 透明、无线通信和高密度阵列集成的传感器示例
穿戴式和植入式应用
穿戴式应用:软体机械传感器的穿戴式应用范围广泛,涵盖假肢皮肤到植入式器件。软体机械传感器的高适配性使其能够与软生物组织密切接触,并最大限度减少传感器伪影。总体而言,已展示的穿戴式生物医学应用主要包括以下几类:用于触觉恢复的机械感知、用于连续健康监测的生理信号传感、用于跟踪肌肉骨骼功能的运动检测以及用于穿戴式麦克风的声学传感。
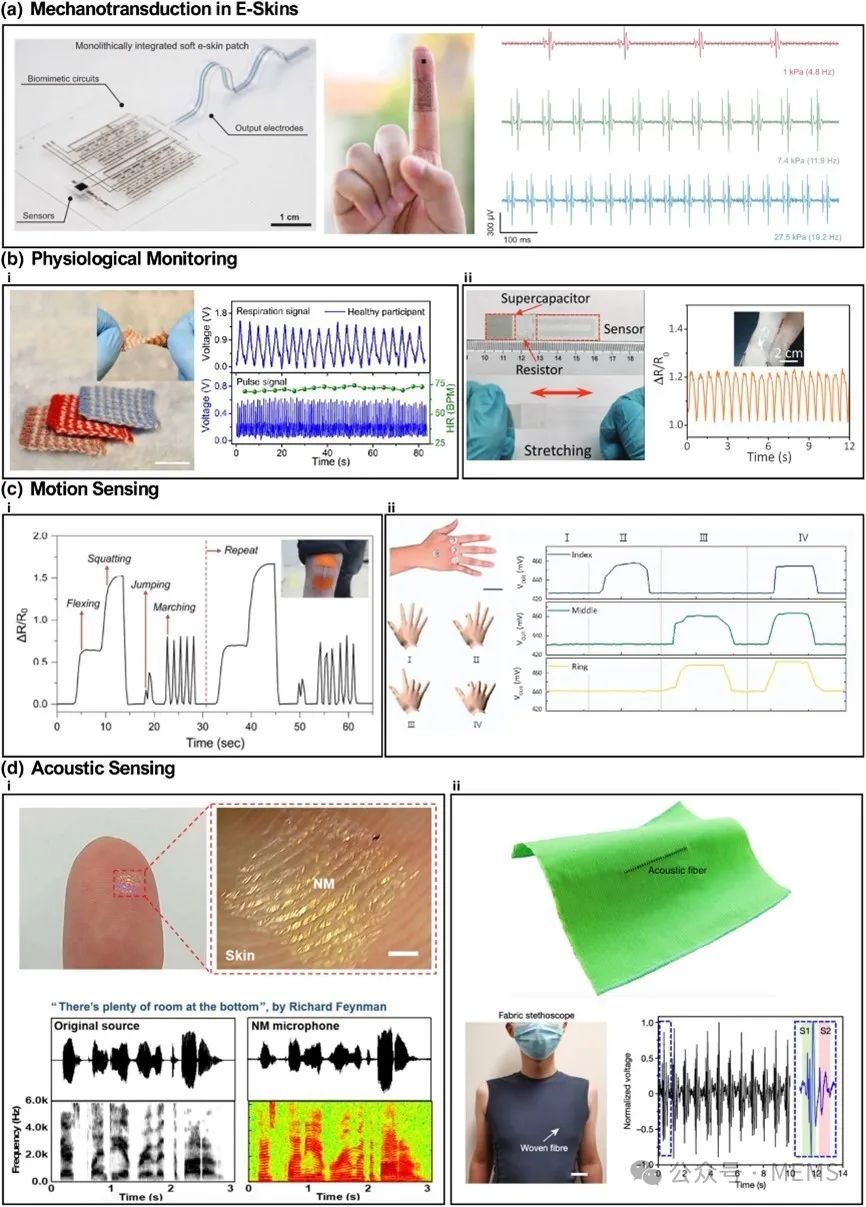
图7 穿戴式应用示例
植入式应用:植入式机械传感器有望为组织/器官监测、术后监测和缺失的组织/器官功能恢复提供宝贵的信息。由于这些传感器需要与人体内部器官密切接触,生物相容性是一个关键因素。此外,为实现完全植入的传感功能和在传感器寿命结束时无需手术移除的需求,如无线通信能力和生物可吸收特性等额外功能也是必要的。迄今为止,在植入式组织/器官监测、术后监测、缺失的组织/器官功能恢复三大主要应用方向上,软体机械传感器取得了显著进展。
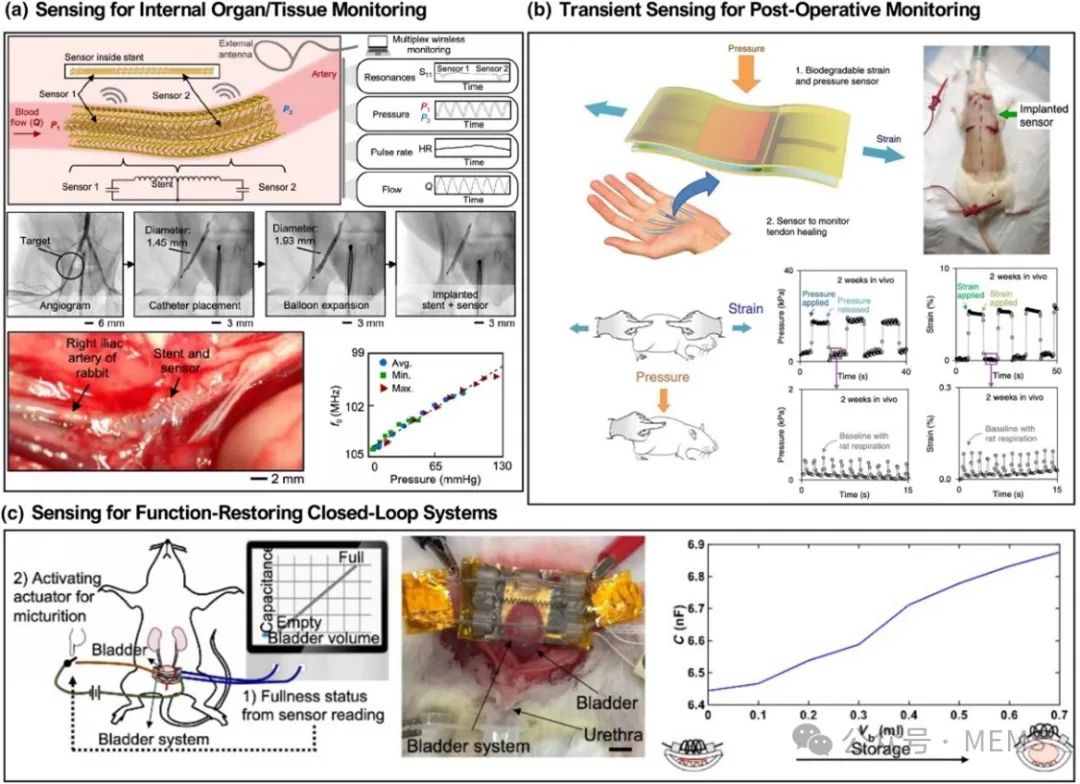
图8 植入式应用示例
在这篇综述中,研究人员主要讨论了面向穿戴式和植入式应用的软体机械传感器的主要类型,以及一些实现这些不同应用的特定功能的常见策略。总而言之,软体机械传感器代表了一类新兴的生物电子器件,具备实现高精度、高舒适性的机械生物数据连续监测的潜力,从而在电子皮肤、生理和术后监测、运动跟踪以及器官功能恢复等领域展现出令人期待的生物医学应用前景。
论文链接:
https://doi.org/10.1002/wnan.1961
审核编辑:刘清
-
昆明理工:无需任何侵入性操作!植入式无创传感器研发取得重要进展2026-02-26 1142
-
新型植入式传感器+可穿戴设备,实现无线物理生化量传感2024-04-09 3450
-
用于穿戴式和植入式健康监测的柔性应变传感器2024-01-03 3379
-
可穿戴电池和可降解植入式电池的未来发展2023-07-03 3484
-
面向可燃气体的传感器研究综述2021-07-05 1153
-
ZSB1和ZSB2柱式称重传感器异同综述2021-06-09 1399
-
机械式传感器有什么优缺点?2020-04-03 5133
-
穿戴式装置中的传感器和模拟器件及MEMS2018-11-12 1876
-
磁电式传感器2017-12-14 3405
-
磁电式传感器解析,磁电式传感器的原理结构及其应用2017-06-06 21218
-
穿戴式设计的传感器技术2017-06-03 919
-
可穿戴设备中的传感器设计2014-12-13 9233
-
1. 穿戴式心电解决方案(穿戴式心电 远程心电 心电监护 ...2014-06-09 9113
-
面向无线传感器网络应用的传感器技术综述2010-05-28 616
全部0条评论

快来发表一下你的评论吧 !
