

EtherCAT运动控制器在UVW对位平台中的应用
电子说
描述
ZMC406硬件介绍
ZMC406是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。
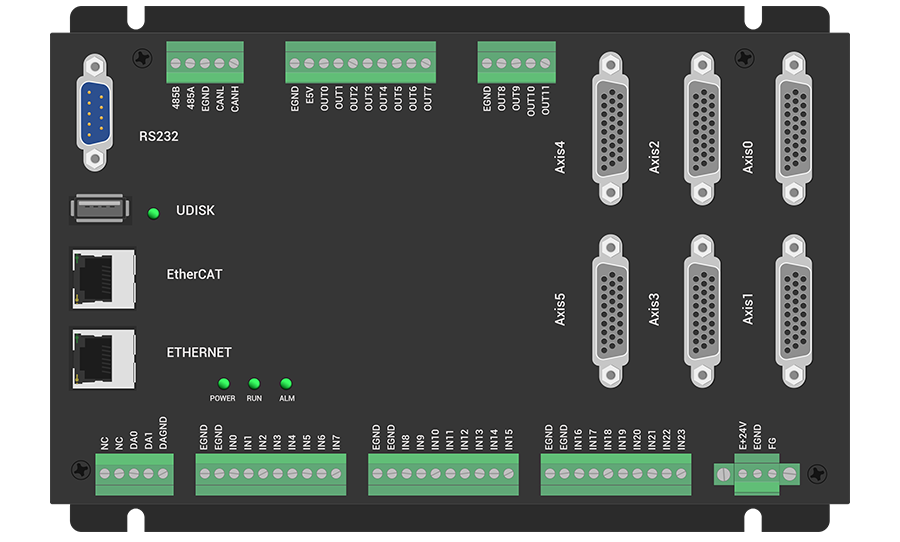
ZMC406支持6轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC406支持PLC、Basic、HMI组态三种编程方式。PC上位机API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。
ZMC406支持6轴运动控制,可采用脉冲轴(带编码器反馈)或EtherCAT总线轴,通用IO包含24路输入口和12路输出口,模拟量AD/DA各两路,EtherCAT最快125us的刷新周期。
此类运动控制器与PCI运动控制卡相比具有如下优点:
(1)不使用插槽,稳定性更好;
(2)可以选用MINI电脑或ARM工控电脑,降低整体成本;
(3)控制器直接做接线板使用,节省空间;
(4)控制器上可以并行运行程序,与PC只需要简单交互,降低PC软件的复杂性等优势。
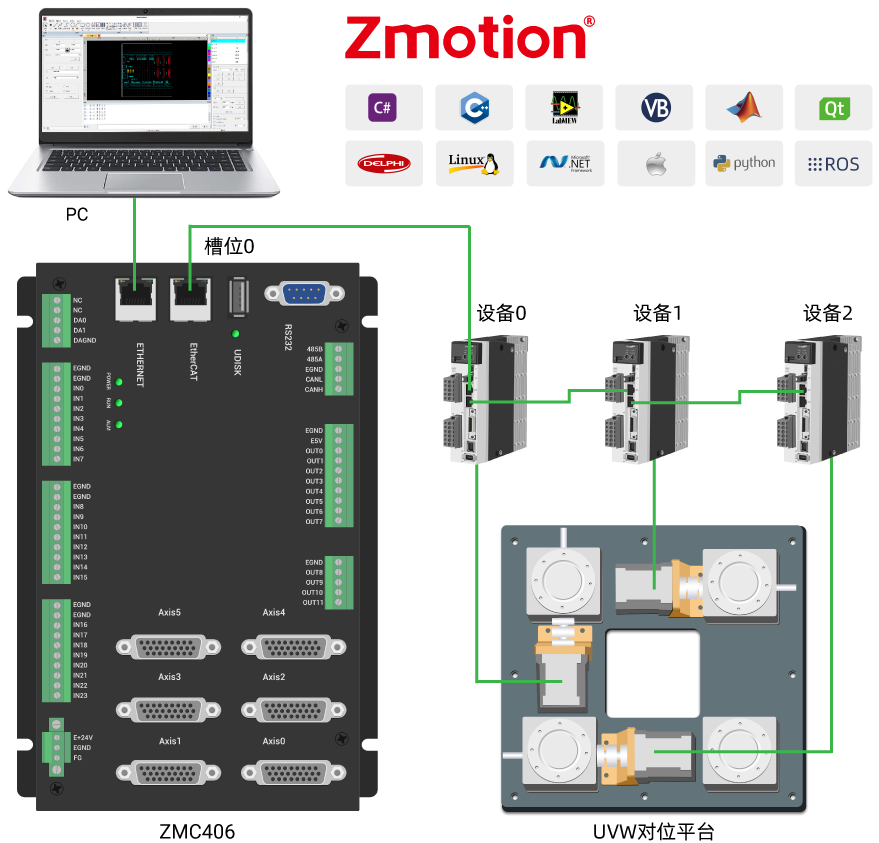
ZMC控制器通过RTSys开发环境来调试,RTSys是一个方便的编程、编译和调试环境。RTSys可以通过串口、以太网、PCI和LOCAL与控制器建立连接。应用程序可以使用VC,VB,VS,C++Builder,C#等软件来开发。调试时可以把RTSys软件同时连接到控制器,程序运行时需要动态库zmotion.dll。
ZMC4系列控制器支持PPR,PRP结构的3轴UVW平台,关节轴U+关节轴V+关节轴W。采用脱机的方式将编辑好的程序下载到控制器上(也可以用PC监视或者实时发送指令操作),可利用触摸屏示教的方式编辑想要运动的轨迹。
▶▶▶ UVW对位平台介绍
1、UVW平台
UVW平台,也被称为XXY平台或XYR对位平台,是一种高精度移动平台,专为高精度对位设备而设计。
该平台属于三轴并联运动机构,通过控制三个线性移动轴的并联运动,可以实现以平面上任意一点为中心进行旋转运动以及沿任意方向平移。这种设计使得UVW平台在工业自动化中成为一个核心技术,特别适用于需要高精度对位功能的应用场景。
2、UVW平台的应用场景与优势
UVW平台与视觉CCD纠偏系统对接在一起,可以迅速完成高精度的纠偏工作,其重复定位精度一般可达±1μm。与以前的xyθ平台相比,UVW平台在控制精度和灵活性方面都有显著的优势。
UVW平台的控制精度高于xyθ平台,并且它可以在平面上的任意一点为中心进行旋转运动,而xyθ平台的旋转中心则必须固定在平台上某处并随平台一同运动。
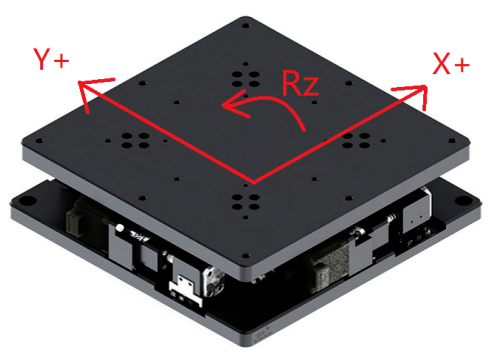
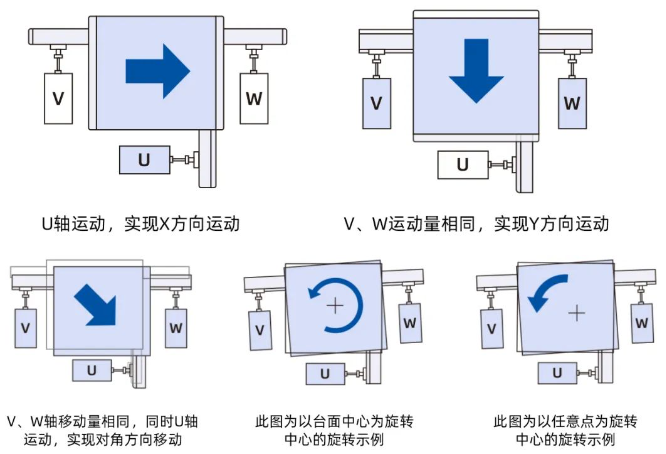
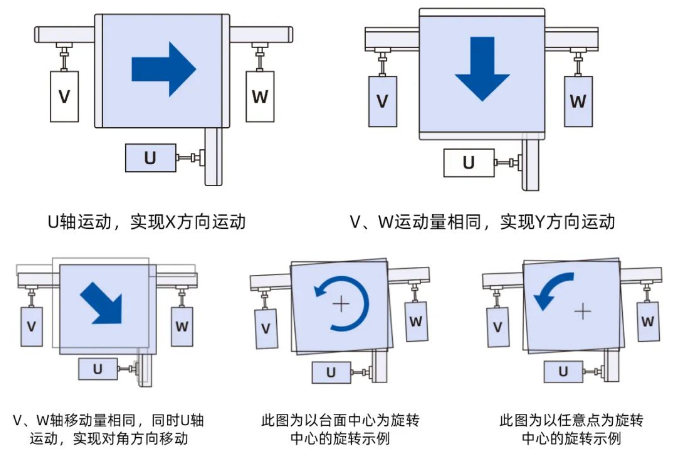
此外,UVW平台需要一个绝对坐标系作为参考系,而xyθ平台则使用随平台动的坐标系作为参考系。UVW平台⼯作模式如下图:
UVW平台主要应用于曝光机、丝印机、贴合机等PCB及半导体等行业。在这些应用中,UVW平台通过配合机器视觉系统,实现高精度对位功能,从而提高生产效率和产品质量。总的来说,UVW平台以其高精度、高灵活性和广泛的应用领域,成为现代工业自动化中不可或缺的一部分。
3、PPR结构和PRP结构的UVW平台区别
UVW平台的PPR和PRP结构区别主要体现在其构型和应用特点上。
首先,从构型上来看,PPR和PRP结构代表了UVW平台的不同设计方式。这两种结构都是UVW平台的常见形式,但它们在具体的机械布局、运动轴的配置以及关节连接方式等方面可能存在差异。这种差异使得PPR和PRP结构在刚度、稳定性以及精度等方面可能表现出不同的性能。
其次,从应用特点上来看,PPR结构的UVW平台可能更注重于结构的稳定性和精度,适用于对精度要求较高且需要稳定运动的场景。而PRP结构的UVW平台可能在一些特定的应用场景中具有优势,比如在一些需要更高灵活性或更复杂运动模式的场合。
▶▶▶ 正运动UVW机械手模型
正运动技术UVW平台运动控制算法于UVW有三种常见模型:FRAME33、FRAME34、FRAME37。
分别对应两种机械结构(PRP、PPR)跟两个坐标系方向(XYY、XXY),可以实现单轴直线运动、两轴线性插补、两轴圆弧插补、空间圆弧等复杂运动。
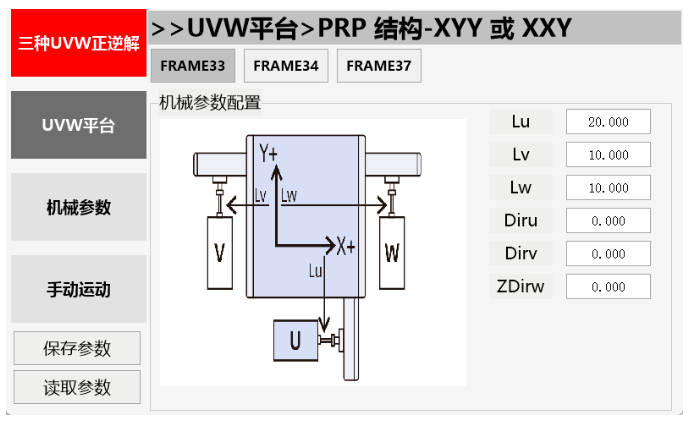
一、FRAME33-UVW对位平台(PRP结构-XYY或XXY)
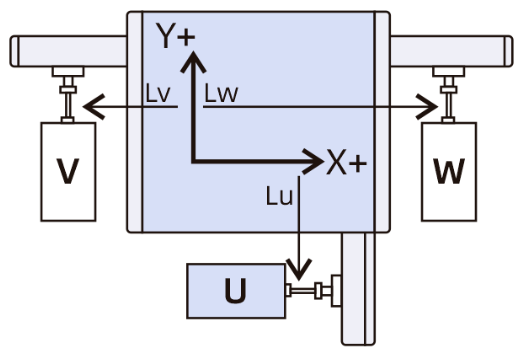
原理:通过安装于同一平面的三个驱动轴的运动,实现定位要求(以下图示均以平台回零后的初始位置为基准)。
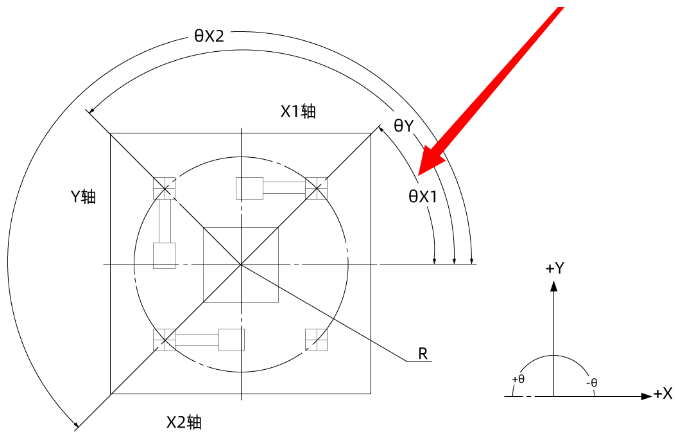
A、电机方向及角度范围
虚拟的XY满足右手法则,角度正向与虚拟XY满足右手法则,实际电机轴方向无要求,根据实际情况填写结构参数即可。
B、TABLE寄存器依次存入机械手结构参数
建立机械手连接时,需要将机械结构参数按照如下次序依次填写到TABLE数组中。FRAME33模型机械结构参数说明如下。
| TABLE(Tablenum,lu,lv,lw, angleonecircle,dirx,diry1,diry2) | |
| Tablenum | 存储转换参数的TABLE位置 |
| lu | U轴的距离参数,填写正值,零点到U轴的垂直距离 |
| lv | V轴的距离参数,填写正值,零点到V轴的垂直距离 |
| lw | W轴的距离参数,填写正值,零点到W轴的垂直距离 |
| angleonecircle | 虚拟旋转轴一圈脉冲数,任意值 |
| diru | U轴的方向,0-与虚拟X正向一致,1反向 |
| dirv | V轴的方向,0-与虚拟Y正向一致,1反向 |
| zdirw | W轴的方向,0-与虚拟Y正向一致,1反向 |
从TableNum编号开始依次机械手结构参数U轴的距离参数,V轴的距离参数,W轴的距离参数,虚拟旋转轴一圈脉冲数,U轴的方向,V轴的方向,W轴的方向到Table中。
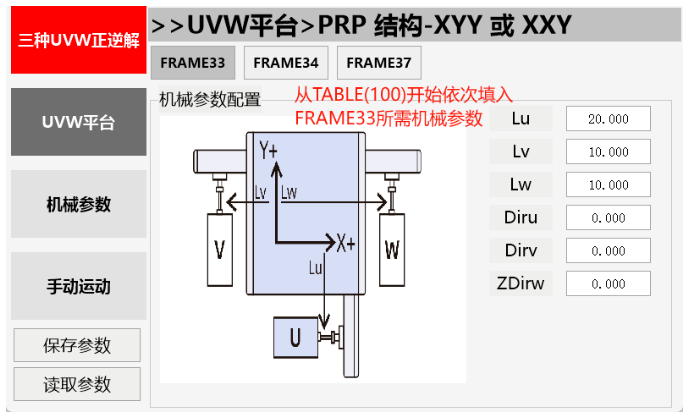
TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw)。例程从TABLE(100)开始依次填入Frame所需机械参数。
C、设置关节轴参数及虚拟轴参数
各轴的轴类型和脉冲当量(units)要设置正确,设置为电机走1mm需要的脉冲数。虚拟轴的units跟实际发送脉冲数无关,用于设置运动精度,虚拟轴的脉冲当量一般设置为1000,表示精度为小数点后3位。


D、确定机械手零点位置
FRAME33需要保证VW轴是水平的。平台上任意一点可作为零点,保证结构参数正确即可。
E、建立机械手正逆解
正解建立:以FRAME33模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNREFRAME指令建立正解模式。指令说明可通过Rtsys软件菜单栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNREFRAME即可查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中 TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw) '选择轴列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立机械手正解 CONNREFRAME(33,tablenum, Axis_a,Axis_b,Axis_c)

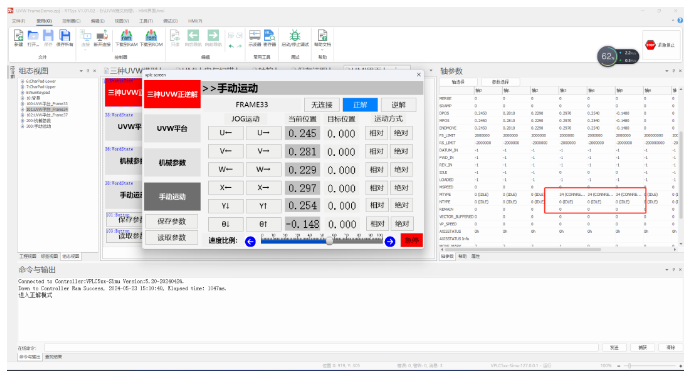
若机械手正解建立成功,虚拟轴MTYPE(当前运动类型)将显示为34,此时只能操作关节轴在关节坐标系中调整机械手姿态,手动运动可通过RTSys软件菜单栏的【工具】-【手动运动】,待【手动运动】界面弹出之后选择关节轴轴编号(本文关节轴以轴0(U轴),轴1(V轴),轴2(W轴))然后根据实际需求选择点动或者寸动。虚拟轴会自动计算末端工作点位于直角坐标系中的位置。
逆解建立:以Frame33模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNFRAME指令建立正解模式。指令说明可通过Rtsys软件工具栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNFRAME查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中 TABLE(TableNum,lu,lv,lw,angleonecircle,diru,dirv,zdirw) '选择轴列表 BASE(Axis_a,Axis_b,Axis_c) '建立机械手逆解 CONNFRAME(33,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

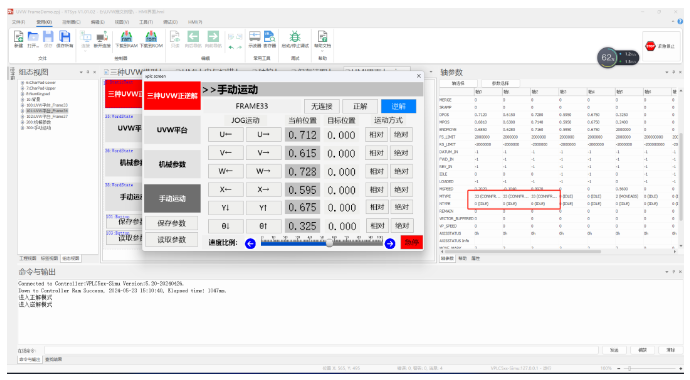
若机械手逆解建立成功,关节轴MTYPE(当前运动类型)将显示为33,【手动运动】界面操作虚拟轴方法同上。此时加工工艺指令只能操作虚拟轴,事先编辑好运动的轨迹在直角坐标系中运动(本文虚拟轴以轴3,轴4,轴5为例),关节轴会自动计算在关节坐标系中如何联合运动。
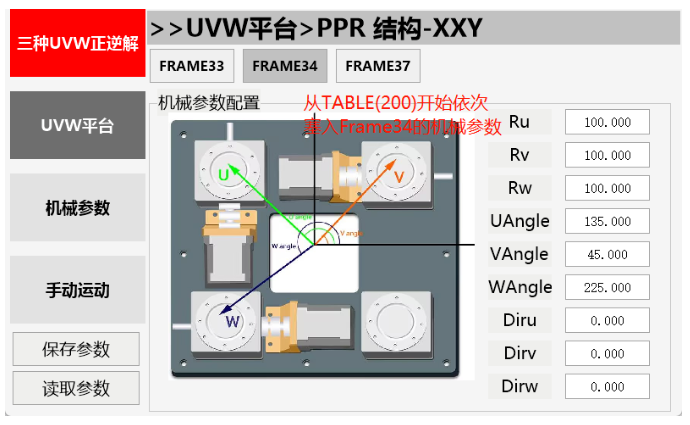
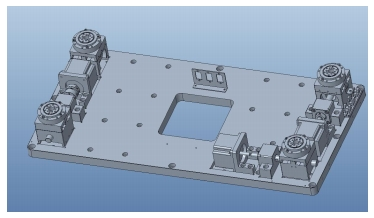
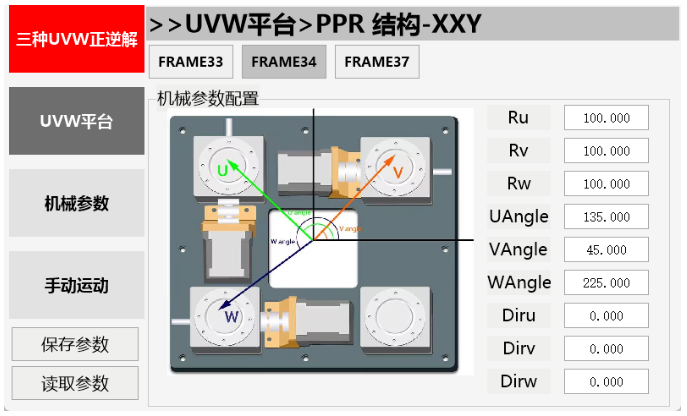
二、FRAME34-UVW对位平台(PPR结构-XXY)
结构示意图
A、电机方向及角度范围
虚拟的XY满足右手法则,角度正向与虚拟XY满足右手法则,实际电机轴方向无要求,根据实际情况填写结构参数即可。
B、TABLE寄存器依次存入机械手结构参数
建立机械手连接时,需要将机械结构参数按照如下次序依次填写到TABLE数组中。FRAME34模型机械结构参数说明如下。
| TABLE(0,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) | |
| Tablenum | 存储转换参数的TABLE位置 |
| Ru | U轴的距离参数,填写正值,零点到U轴的旋转中心距离 |
| Rv | V轴的距离参数,填写正值,零点到V轴的旋转中心距离 |
| Rw | W轴的距离参数,填写正值,零点到W轴的旋转中心距离 |
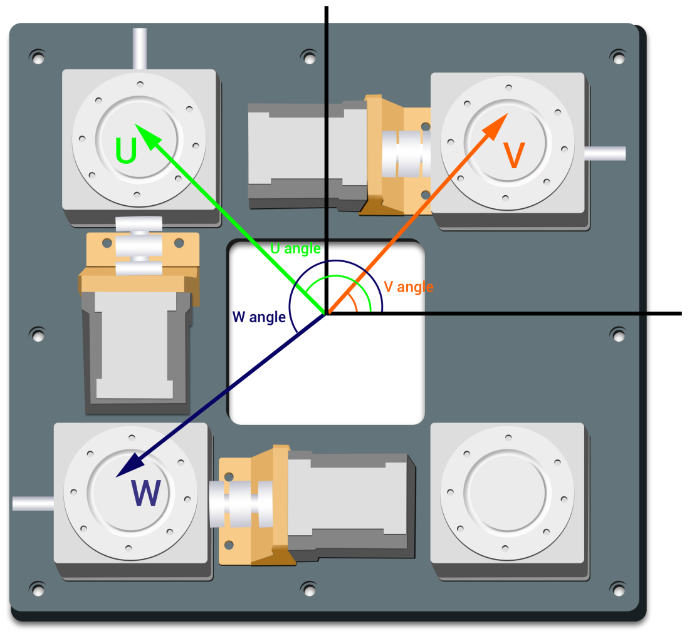
| Uangle | U轴零点时和x轴角度,单位度 |
| Vangle | V轴零点时和x轴角度,单位度 |
| Wangle | W轴零点时和x轴角度,单位度 |
| angleonecircle | 虚拟旋转轴一圈脉冲数,任意值 |
| diru | U轴的方向,0-与虚拟Y正向一致,1反向 |
| dirv | V轴的方向,0-与虚拟X正向一致,1反向 |
| dirw | W轴的方向,0-与虚拟X正向一致,1反向 |
从TableNum编号开始依次机械手结构参数U轴的距离参数,V轴的距离参数,W轴的距离参数,U轴零点时和X轴的角度,V轴零点时和X轴的角度,W轴零点时和X轴的角度,虚拟旋转轴一圈脉冲数,U轴的方向,V轴的方向,W轴的方向到Table中。
TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)
C、设置关节轴参数及虚拟轴参数
各轴的轴类型和脉冲当量(units)要设置正确,设置为电机走1°需要的脉冲数。虚拟轴的units跟实际发送脉冲数无关,用于设置运动精度,虚拟轴的脉冲当量一般设置为1000,表示精度为小数点后3位。
D、确定机械手零点位置
FRAME34保证VW轴是水平的,并平行X轴,U平行Y轴。平台上任意一点可作为零点,保证结构参数正确即可。
E、建立机械手正逆解
正解建立:以FRAME34模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNREFRAME指令建立正解模式。指令说明可通过Rtsys软件菜单栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNREFRAME即可查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) '选择轴列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立机械手正解 CONNREFRAME(34,tablenum, Axis_a,Axis_b,Axis_c)

若机械手正解建立成功,虚拟轴MTYPE(当前运动类型)将显示为34,此时只能操作关节轴在关节坐标系中调整机械手姿态,手动运动可通过RTSys软件菜单栏的【工具】-【手动运动】,待【手动运动】界面弹出之后选择关节轴轴编号(本文关节轴以轴0(U轴),轴1(V轴),轴2(W轴))然后根据实际需求选择点动或者寸动。虚拟轴会自动计算末端工作点位于直角坐标系中的位置。
逆解建立:以FRAME34模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNFRAME指令建立正解模式。指令说明可通过RTSys软件工具栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNFRAME查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)'选择轴列表 BASE(Axis_a,Axis_b,Axis_c) '建立机械手逆解 CONNFRAME(34,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

若机械手逆解建立成功,关节轴MTYPE(当前运动类型)将显示为33,【手动运动】界面操作虚拟轴方法同上。此时加工工艺指令只能操作虚拟轴,事先编辑好运动的轨迹在直角坐标系中运动(本文虚拟轴以轴3,轴4,轴5为例),关节轴会自动计算在关节坐标系中如何联合运动。
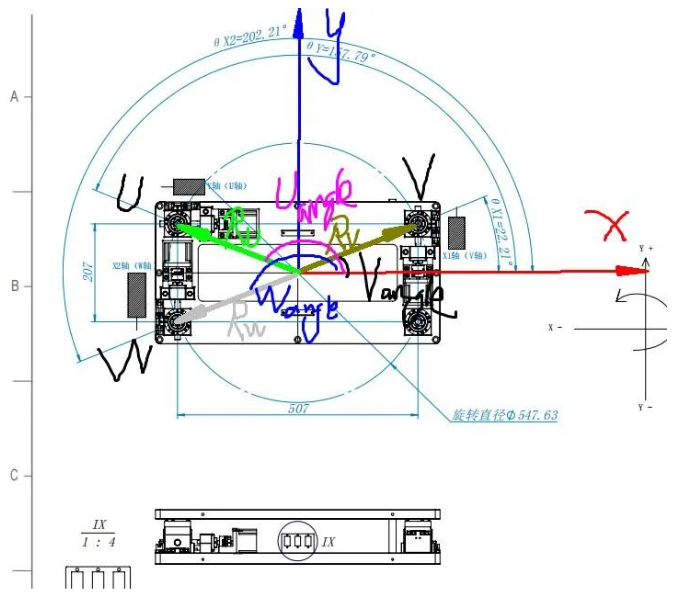
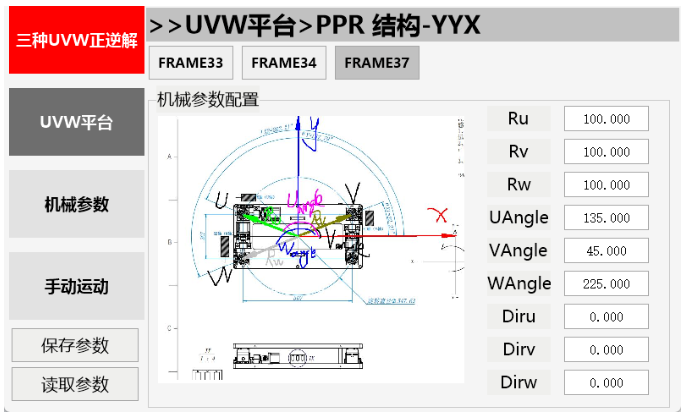
三、FRAME37-UVW对位平台(PPR结构-YYX)
A、电机方向及角度范围
虚拟的XY满足右手法则,角度正向与虚拟XY满足右手法则,实际电机轴方向无要求,根据实际情况填写结构参数即可。
B、TABLE寄存器依次存入机械手结构参数
建立机械手连接时,需要将机械结构参数按照如下次序依次填写到TABLE数组中。FRAME37模型机械结构参数说明如下。
| TABLE(0,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) | |
| Tablenum | 存储转换参数的TABLE位置 |
| Ru | U轴的距离参数,填写正值,零点到U轴的旋转中心距离 |
| Rv | V轴的距离参数,填写正值,零点到V轴的旋转中心距离 |
| Rw | W轴的距离参数,填写正值,零点到W轴的旋转中心距离 |
| Uangle | U轴零点时和x轴角度,单位度 |
| Vangle | V轴零点时和x轴角度,单位度 |
| Wangle | W轴零点时和x轴角度,单位度 |
| angleonecircle | 虚拟旋转轴一圈脉冲数,任意值 |
| diru | U轴的方向,0-与虚拟Y正向一致,1反向 |
| dirv | V轴的方向,0-与虚拟X正向一致,1反向 |
| dirw | W轴的方向,0-与虚拟X正向一致,1反向 |
从TableNum编号开始依次机械手结构参数U轴的距离参数,V轴的距离参数,W轴的距离参数,U轴零点时和X轴的角度,V轴零点时和X轴的角度,W轴零点时和X轴的角度,虚拟旋转轴一圈脉冲数,U轴的方向,V轴的方向,W轴的方向到Table中。
TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)。
C、设置关节轴参数及虚拟轴参数
各轴的轴类型和脉冲当量(units)要设置正确,设置为电机走1°需要的脉冲数。虚拟轴的units跟实际发送脉冲数无关,用于设置运动精度,虚拟轴的脉冲当量一般设置为1000,表示精度为小数点后3位。
D、确定机械手零点位置
FRAME37保证VW轴是水平的,并平行X轴,U平行Y轴。平台上任意一点可作为零点,保证结构参数正确即可。
E、建立机械手正逆解正解建立:
以FRAME37模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNREFRAME指令建立正解模式。指令说明可通过RTSys软件菜单栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNREFRAME即可查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw) '选择轴列表 BASE(Viraxis_x, Viraxis_y,Viraxis_v) '建立机械手正解 CONNREFRAME(37,tablenum, Axis_a,Axis_b,Axis_c)

若机械手正解建立成功,虚拟轴MTYPE(当前运动类型)将显示为34,此时只能操作关节轴在关节坐标系中调整机械手姿态,手动运动可通过RTSys软件菜单栏的【工具】-【手动运动】,待【手动运动】界面弹出之后选择关节轴轴编号(本文关节轴以轴0(U轴),轴1(V轴),轴2(W轴))然后根据实际需求选择点动或者寸动。虚拟轴会自动计算末端工作点位于直角坐标系中的位置。
逆解建立:以FRAME37模型为例。先将机械手结构参数从某个Table起始编号依次存储到Table数组中,然后选择对应模型的轴列表,使用CONNFRAME指令建立正解模式。指令说明可通过RTSys软件工具栏的【常用】-【帮助文档】-【RTBasic帮助】-【索引】,在查找栏搜索CONNFRAME查看。
'将机械手参数从编号TableNum开始依次存储到Table数组中 TABLE(TableNum,Ru,Rv,Rw,Uangle,Vangle,Wangle,angleonecircle,diru,dirv,dirw)'选择轴列表 BASE(Axis_a,Axis_b,Axis_c) '建立机械手逆解 CONNFRAME(37,tablenum, Viraxis_x, Viraxis_y,Viraxis_v)

若机械手逆解建立成功,关节轴MTYPE(当前运动类型)将显示为33,【手动运动】界面操作虚拟轴方法同上。此时加工工艺指令只能操作虚拟轴,事先编辑好运动的轨迹在直角坐标系中运动(本文虚拟轴以轴3,轴4,轴5为例),关节轴会自动计算在关节坐标系中如何联合运动。
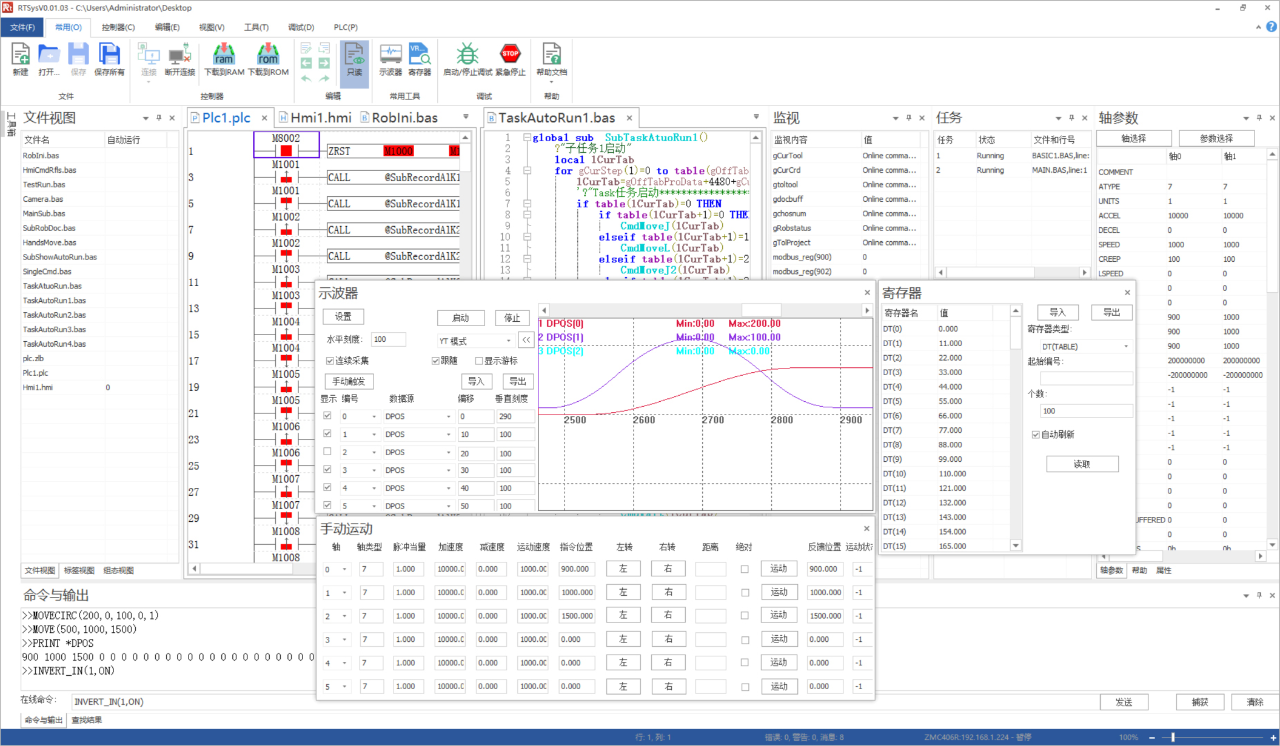
▶▶▶ 例程演示
RTSys软件支持Basic,HMI与PLC混合编程,本例程采用Basic结合HMI界面混合编程进行演示。可通过RTSys软件菜单栏的【HMI】-【工具箱】,选择空间进行拖拉摆放,设计交互界面。
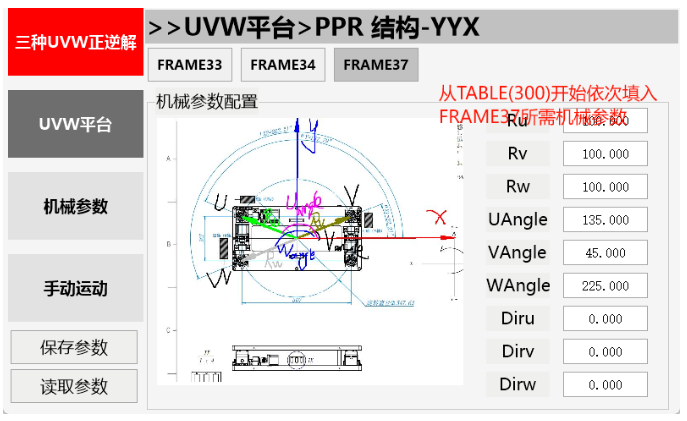
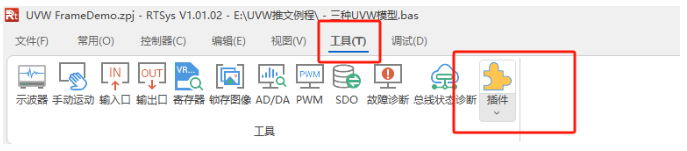
1、将程序下载到控制器运行,先后点击RTSys软件菜单栏的【工具】-【插件】-【XPLC SCREEN】。
2、待交互界面弹出后点击“UVW平台”按钮,根据实际硬件选择对应UVW类型和配置对应机械参数。
3、选择完UVW平台类型和设置好机械参数后,点击“机械参数”按钮进行轴参数配置。

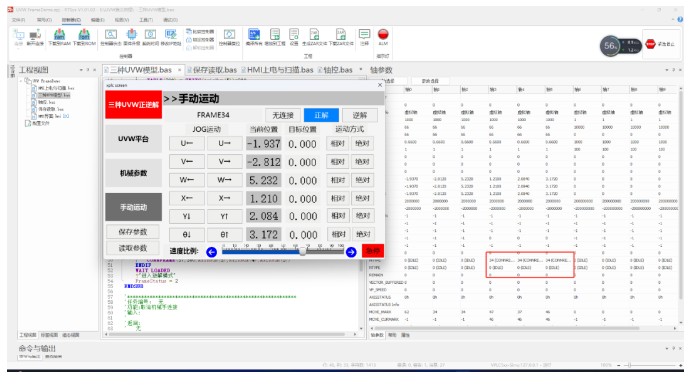
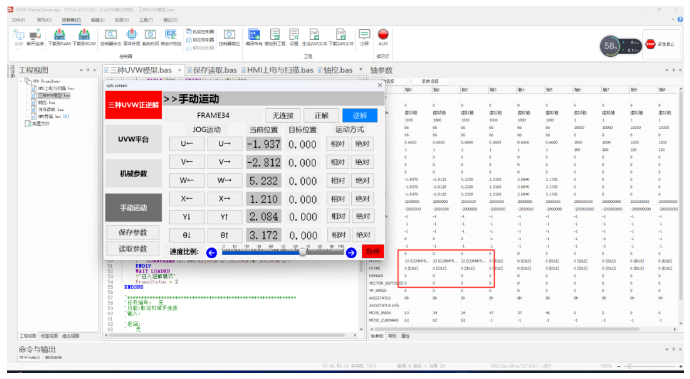
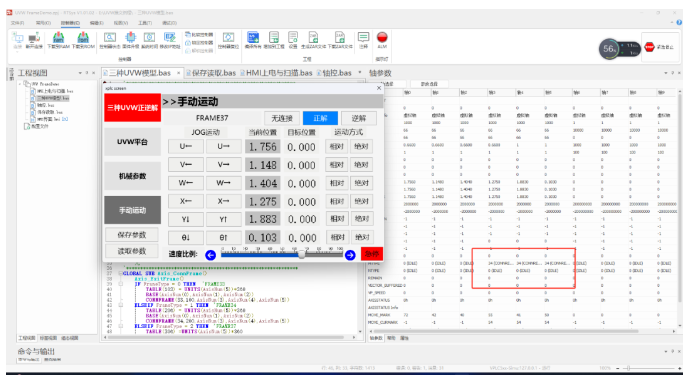
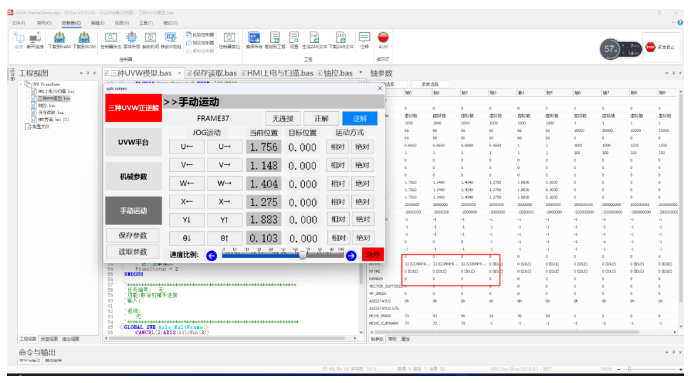
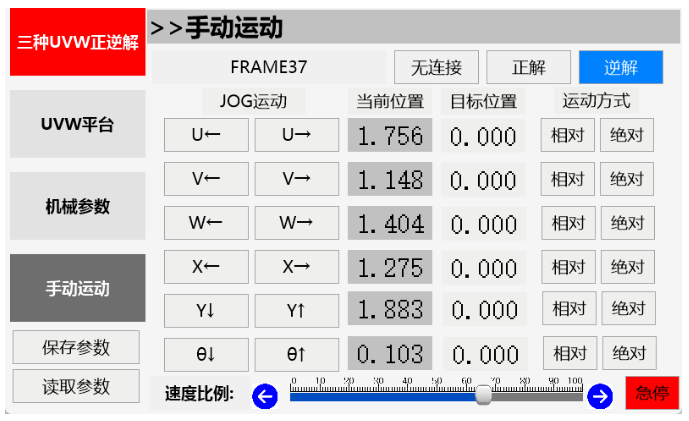
4、设置好UVW平台和轴参数后,点击“手动运动”进行正逆解切换,和操作对应轴进行运动。
本次,正运动技术EtherCAT运动控制器在UVW对位平台中的应用,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
EtherCAT运动控制器在ROS上的应用(上)2024-03-06 2481
-
EtherCAT运动控制器在ROS上的应用开发案例(上)2024-03-17 3654
-
EtherCAT运动控制器在UVW对位平台中的应用# 正运动技术# 运动控制器# 运动控制卡# UVW对位平台正运动技术 2024-06-04
-
EtherCAT总线运动控制器硬件是如何进行接线的?2021-07-15 7654
-
正运动技术运动控制器EtherCAT总线快速入门2021-09-07 2797
-
正运动技术运动控制器EtherCAT总线的基础使用2021-09-27 7242
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 2039
-
EtherCAT总线运动控制器应用进阶一2021-09-22 6008
-
EtherCAT运动控制器在ROS上的应用(下)2024-03-13 1838
-
EtherCAT运动控制器在LabVIEW中的运动控制与实时数据采集2024-04-08 2561
-
EtherCAT运动控制器与PLC的区别2024-06-12 2827
-
BissC绝对值编码器在EtherCAT运动控制器中的应用2024-07-24 3118
-
基于VPLC7机器视觉运动控制一体机的UVW视觉对位解决方案2024-08-01 1866
-
SSI绝对值编码器在EtherCAT运动控制器中的应用2024-10-09 2971
-
全国产强实时运动控制内核(十三):UVW对位贴合应用2026-01-05 4016
全部0条评论

快来发表一下你的评论吧 !
