

雷达在汽车主动安全系统中的应用
汽车安全系统设计
描述
汽车安全性能是汽车技术发展的一个重要课题。为了提高车辆的行车安全性能,各种先进技术被应用在汽车上。下面小编介绍了汽车雷达在新型主动安全系统车辆上的应用,对其系统结构、工作原理及设计思路进行阐述;希望能对今后主动安全性能研究开发起到一定的指导作用。
汽车的主动安全技术可以将意外事故防范于未然,越来越受到各大车企及消费者的重视,更多的先进技术也被应用到其中。以雷达测距技术为核心的预碰撞安全系统及自适应巡航控制系统成为近几年主动安全系统新向标。
预碰撞安全系统
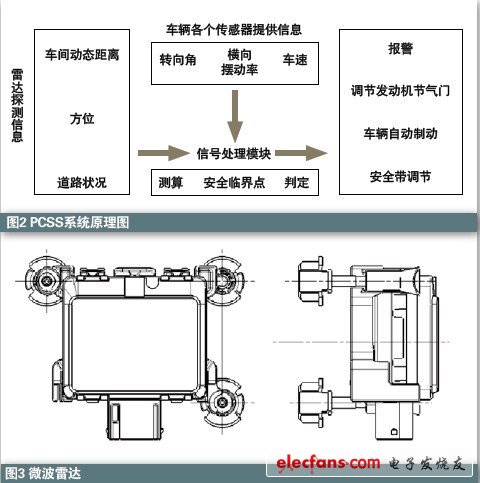
预碰撞安全系统(Pre-Collision Safety System)简称PCSS,它主要由实时监测雷达、各种传感器、信号处理模块、报警模块及执行机构组成;该系统的核心技术是利用安装在车辆前端的雷达装置对前方动态车辆及障碍物进行测距,并将测得的车辆及障碍物信息反馈给系统信号处理模块(如图1)。
信号处理模块将雷达反馈信息与车辆各个传感器信息统合计算,计算出带有PCSS系统车辆与前方障碍物的相对距离和相对速度。在距离与速度无法满足系统预先设定的最小安全值时,执行机构将会启动车辆上安全装置辅助驾驶者对车辆行驶进行控制,以实现主动防碰撞的目标。

执行机构针对安全危害级别所做出辅助控制如下:第一调节发动机节气门开度,减小车辆动力输出;第二操作制动器对车辆制动,避免车辆的碰撞或减轻碰撞程度;第三收紧安全带,防止乘车人员受伤害(如图2)。
自适应巡航控制系统
自适应巡航控制系统(Adaptive Cruise Control System)简称ACC,该系统与预碰撞安全系统工作原理基本相同。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路状况,同时轮速传感器采集车轮转速信号。当ACC系统车辆前方道路畅通时,巡航速度控制按驾驶者意愿设定车速并保持等速行驶;当前方出现障碍车辆或与前车之间距离过小时,ACC控制单元可通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
雷达的分类及概况
按雷达的测量介质不同,可将车用雷达分为超声波雷达、红外线雷达、激光雷达及微波雷达。由于超声波雷达、红外线雷达的探测距离相对较短,目前主要应用在车辆倒车控制系统中。而激光雷达和微波雷达具有测距远、精度高等优点,被广泛应用于汽车主动安全系统上。
激光雷达按测量原理不同可分为脉冲式和相位式。激光雷达的优点是结构相对简单,具有高精度、高方向性、探测距离远、能识别道路状况及产品价格便宜等特点。 采用激光雷达的预碰撞系统先从激光扫描雷达所获得的车距与方位数据中抽取有用的数据,依据后车的动力学特性进行车辆路径的估算,行车路径估算的半径R是根据车速和转角第一次估算的半径R1与根据车速和横向摆动速率第二次估算的半径R2来确定的。
不过激光雷达的光学性能易受环境因素的影响,在雨、雾、风沙及雪的天气情况下,其测量性能会有所下降。由于激光雷达接受的目标物信号会含有干扰源,在预碰撞系统上应用时只能传输相对车距信息,并通过信号处理模块对距离信息准确快速的计算,得出相对车辆速度信息。
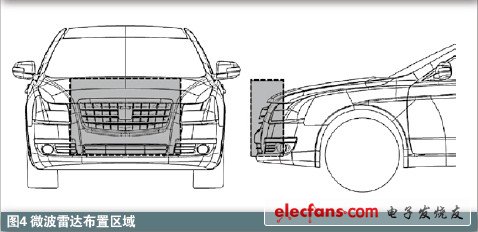
微波雷达按测量原理不同可分为脉冲调频式(PFM)和调频连续波式(FMCW)。微波雷达(如图3)采用毫米电磁波作为探测介质,其波长均为毫米级,故也可称为毫米波雷达。微波具有探测距离远、穿头能力强、运行可靠以及实时性佳等优点。并且测量性能受环境及天气等外界因素的影响较小,可直接探测获得 PCSS系统车辆与前方目标车的距离和相对速度信息。在主动安全系统中雷达所使用的微波频率主要集中在三个频段,分别是23GHz~24GHz、 60GHz~61GHz、76GHz~77GHz。在这三个特定频段上的微波辐射能量衰减特性较大,使雷达信号的传播限制在一个较为合理的范围之内,从而降低对其它车辆雷达及无线通讯设备的影响,并减少对周围人体的辐射。
雷达的布置要求
为了满足PCSS及ACC系统功能的正常使用,雷达一般布置在车辆前端离地面300mm~1000mm之间,并在车辆水平中轴线方向±500mm范围内的空间区域(如图4)。 此区域雷达前端可能存在的覆盖件,例如保险杠、雷达天线屏蔽器、散热器格栅或车辆品牌标徽等。理想的微波雷达布置位置是前方没有覆盖件或只有塑料材质的覆 盖件,因为金属材质的覆盖件会影响微波雷达的信息反馈。如果雷达必须安装在一些覆盖件的后方,为使雷达完全发挥其原有的功效,需特别注意覆盖件的材料选 择、结构设计以及和其它周边零件相对位置。在系统车辆使用过程中,雷达前部覆盖件表面的水滴、水膜和积雪都可能引起额外的信号衰减并进一步导致性能和功能受限。
雷达前端车身覆盖件的材料选择
覆盖件原则上不应该使用传导性良好的材质(比如金属),因为金属件的介电常数较大,对雷达波的反射信号会产生严重的损耗。一般用塑料材质作为雷达覆盖件 (如保险杠或散热器格栅),其介电常数都小于4,对雷达波的反射信号影响较小(如表1)。在以保险杠或散热器格栅作为雷达前端覆盖件时,应尽量选用单一材质,并且在雷达辐射透射区域内避免采用涂装、电镀等表面处理工艺。
雷达前端车身覆盖件的结构设计
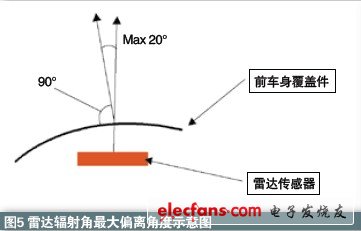
覆盖件在雷达波辐射区域需要是简单平滑的曲面,此曲面在水平方向和垂直方向上的曲面半径都应该大于400mm,尽量避免复杂的几何结构。同时雷达的辐射角与覆盖件的外表曲面应垂直。考虑到车辆前方雷达的匹配,此角度允许有20°的最大偏离(如图5)。在雷达布置前期考虑到雷达的售后维修及校正等方面的需求,在覆盖件结构设计时留有可方便拆卸的装配结构。
雷达与车身前端周边零件的相对位置要求
雷达属于高敏性电子器械,对自身的工作环境要求相对较高,除了与前端覆盖件要求有10mm以上距离间隙外,对其它周边零部件也有特定的距离要求。因车辆喇叭的声波会对雷达信号产生干扰,在雷达的后方及周围各向300mm范围内不应有喇叭安装。通常微波雷达的工作环境温度都小于90℃,所以雷达的布置应与发动机水箱散热器、油冷器及空调冷凝器等高温工作

零部件保持特定的距离间隙;以防止零部件之间热传递,从而导致雷达工作失效。同样雷达的辐射区域也有相对位置要求,雷达的辐射波区域前端不应被前牌照所遮挡(GB规定前牌照大小440×140mm,EEC规定前牌照大小520×120mm),雷达的辐射波范围与前牌照必须有10mm以上相对距离间隙(如图6)。
结论
随着现代汽车向节能、环保与安全的方向发展,车用雷达作为新型的主动安全系统关键组件之一,必将拥有广阔的市场前景。而车用雷达及其安全系统相关技术的研究,对于促进汽车交通安全的发展具有重要意义。
-
AEB是一种汽车主动安全技术,主要由哪3大模块构成?2024-02-20 760
-
汽车主动安全:后势看俏趋势尽显2014-08-21 4418
-
【OK210申请】汽车主动安全控制系统2015-08-09 2168
-
汽车毫米波雷达传感器的性能一致性2019-07-29 6162
-
如何利用嵌入式雷达技术提升汽车主动安全性?2019-09-02 1613
-
要实现汽车主动安全,ADAS才是关键2020-05-15 3261
-
汽车主动安全系统领域的重要角色——TPMS2010-02-11 1217
-
汽车安全系统分析2010-07-09 1413
-
汽车安全系统技术架构分析2011-01-04 1473
-
TMS320C6201在汽车智能主动安全系统中的应用2011-02-25 1183
-
基于传感器的汽车主动安全设计_陈立娇2017-03-19 857
-
汽车主动安全系统技术架构2017-11-22 1147
-
AD8283雷达模拟前端在汽车安全系统中的应用优势2019-07-10 3312
-
对于汽车主动安全技术你了解多少2019-07-09 2795
-
用于主动安全应用的FMCW雷达设计2022-06-16 2788
全部0条评论

快来发表一下你的评论吧 !
