

异构R5实时系统开发笔记-基于芯驰D9360
描述
本篇测评由与非网的优秀测评者“短笛君”提供。
本文将介绍基于米尔电子MYD-YD9360商显板的R5协处理器开发方案测试。
本处参考对D9360中的协处理器进行开发测试
开发之前请确认编译环境正常可以正常对镜像进行编译
具体参考之前编译Ubuntu系统文章,自行编译buildroot系统测试
1.1打开RTOS驱动
freeRTOS的源码放在ssdk包下面,我们可以通过图形化界面启动RTOS系统。D9的ssdk图形化界面是通过menuconfig.sh脚本配置打开,此脚本在ssdk/tools下。以D9360为例,如下:
ddj@ubuntu:~/YD9X/MYD-YD9X-SDK_V1.0/source/ssdk$ pwd/home/ddj/YD9X/MYD-YD9X-SDK_V1.0/source/ssdk
~/MYD-JD9X-ubuntu/MYD-JD9X-SDK_V1.0/source/ssdk$ ./tools/menuconfig.sh -b d9360_ref -p ref -c secure


1.2 添加RTOS例程驱动
RTOS系统例程在examples/kunlun/drivers
ddj@ubuntu:~/YD9X/MYD-YD9X-SDK_V1.0/source/ssdk/examples/kunlun/drivers$ ls
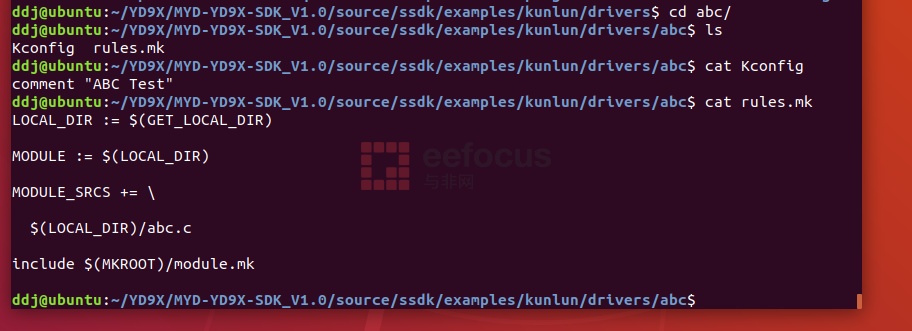
新建一个abc目录
并配置Kconfig和rules.mk文件
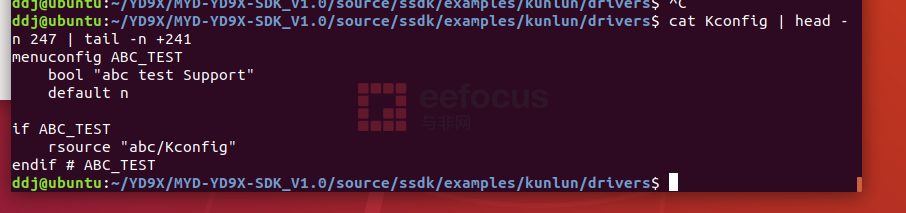
返回driver目录下 配置Kconfig添加ABC去东门模块初始状态和图形界面类型
ABC驱动模块的初始状态和图形界面类型
在rules.mk文件下,添加如下内容

MODULES += $(LOCAL_DIR)/abc: 如果配置选项 CONFIG_ABC_TEST 为 "y",则会将 $(LOCAL_DIR)/abc 添加到变量 MODULES 中。这意味着当启用了 "ABC Test" 功能时,会将 $(LOCAL_DIR)/abc 模块添加到模块列表中。
R5核数据发送到A55核中
将rpmsg目录下的rpmsg_test.c文件复制到abc.c文件中,该驱动描述如何通过RPMSG协议进行核间通信。我们可以在此程序基础上加入自己的协议,以下是R5核发送“Hello, RPMSG!”字符串到A55核,并打印出接收到的信息的函数。
void send_receive_string(rpmsg_channel_t channel, const char *message) {
int max_payload; struct dcf_ccm_hdr *snd_pkg; struct dcf_ccm_hdr *rcv_pkg; status_t ret;
max_payload = rpmsg_channel_max_payload(channel); snd_pkg = osAlloc(max_payload); rcv_pkg = osAlloc(max_payload); ASSERT(snd_pkg && rcv_pkg);
memset(snd_pkg, 0x0, max_payload); memset(rcv_pkg, 0x0, max_payload);
snd_pkg->dmsg.msg_type = COMM_MSG_CCM_ECHO; snd_pkg->dmsg.opflags |= DCF_MSGF_TMS; snd_pkg->dmsg.msg_len = sizeof(struct dcf_ccm_hdr) - sizeof(struct dcf_message);
strncpy(snd_pkg->data, message, max_payload - sizeof(struct dcf_ccm_hdr));
ret = rpmsg_channel_send(channel, RPMSG_ECHO_EPT_ADDR, snd_pkg, max_payload, 3000); if (ret == RPMSG_SUCCESS) { printf("Sent: %s\n", message); } else { printf("Failed to send message\n"); }
int received_len; ret = rpmsg_channel_recv(channel, rcv_pkg, max_payload, &received_len, 3000); if (ret == RPMSG_SUCCESS) { printf("Received: %s\n", rcv_pkg->data); } else { printf("Failed to receive message\n"); }
osFree(snd_pkg); osFree(rcv_pkg);}
将以上函数添加至abc.c文件内,并在主函数(rpmsg_test)编写调用该函数条件,如下:
const char* message_to_send = "Hello,rpmsg";
if (argc == 0) { rpmsg_test_show(); goto exit; }
if (argc == 2) { test_case = 0; type = atoi(argv[0]); rproc = atoi(argv[1]); } else if (!strcmp(argv[0], "ping")) { test_case = 1; type = atoi(argv[1]); rproc = atoi(argv[2]); times = atoi(argv[3]); } else if (!strcmp(argv[0], "iperf")) { test_case = 2; type = atoi(argv[1]); rproc = atoi(argv[2]); times = atoi(argv[3]);}//新添加的条件 else if(!strcmp(argv[0], "send")){ test_case = 3; type = atoi(argv[1]); rproc = atoi(argv[2]); times = atoi(argv[3]); } else { printf("Unknown cmd %s\n", argv[0]); goto exit; }switch (test_case) { case 0: do_rpmsg_echo_test(channel); break;
case 1: do_rpmsg_ping_test(channel, times); break; case 2: do_rpmsg_iperf_test(channel, times); break;
case 3: send_receive_string(channel, message_to_send); break;
default: printf("Unknown case %d\n", test_case); break; }
//加入串口打印提示(跳至rpmsg_test_show函数)printf("\nTest command:\n"); printf("\trpmsg_test \n"); printf("\trpmsg_test ping \n"); printf("\trpmsg_test iperf \n"); printf("\trpmsg_test send \n");
printf("\ne.g: test ping rpmsg.virtio 10 times with secure, use command:\n"); printf("\trpmsg_test ping 0 1 10\n");
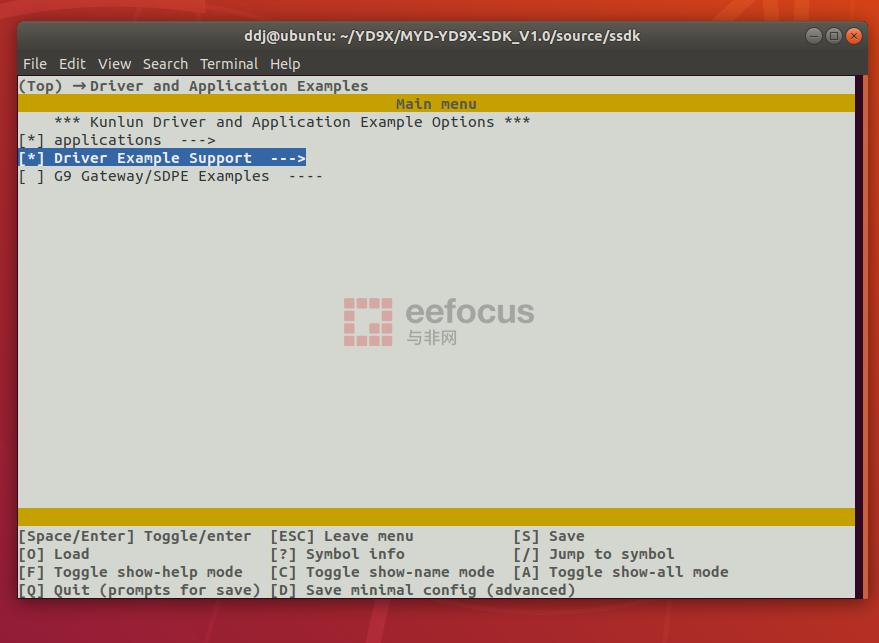
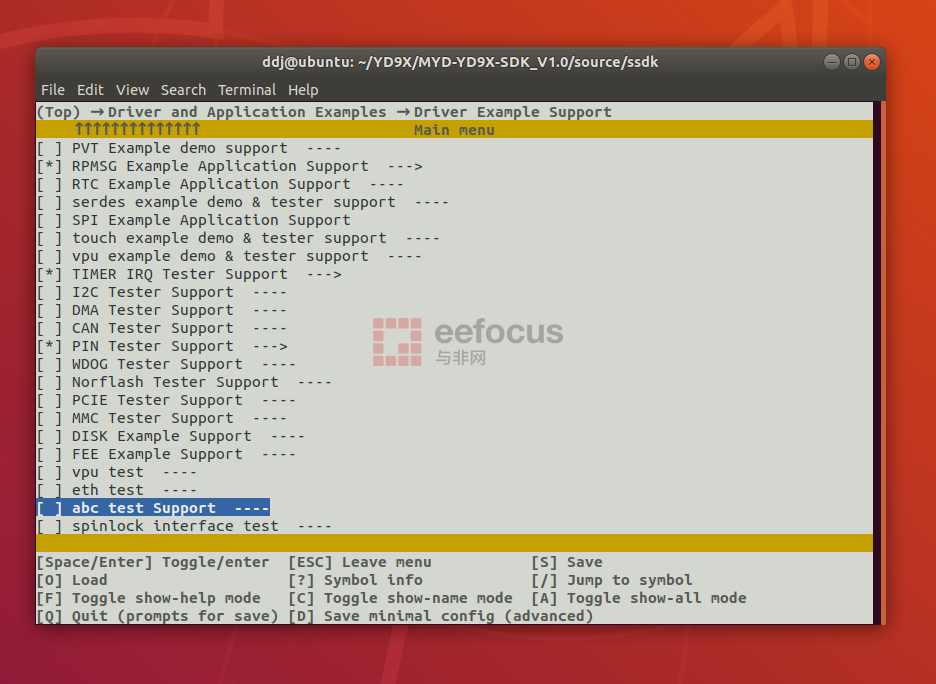
通过5.1小节打开图形化配置界面,进入到Driver and Application Examples/Driver Example Support下,可以看到我们新加的abc test Support驱动配置选项,需要关闭RPMSG Example Application Support选项,如下:
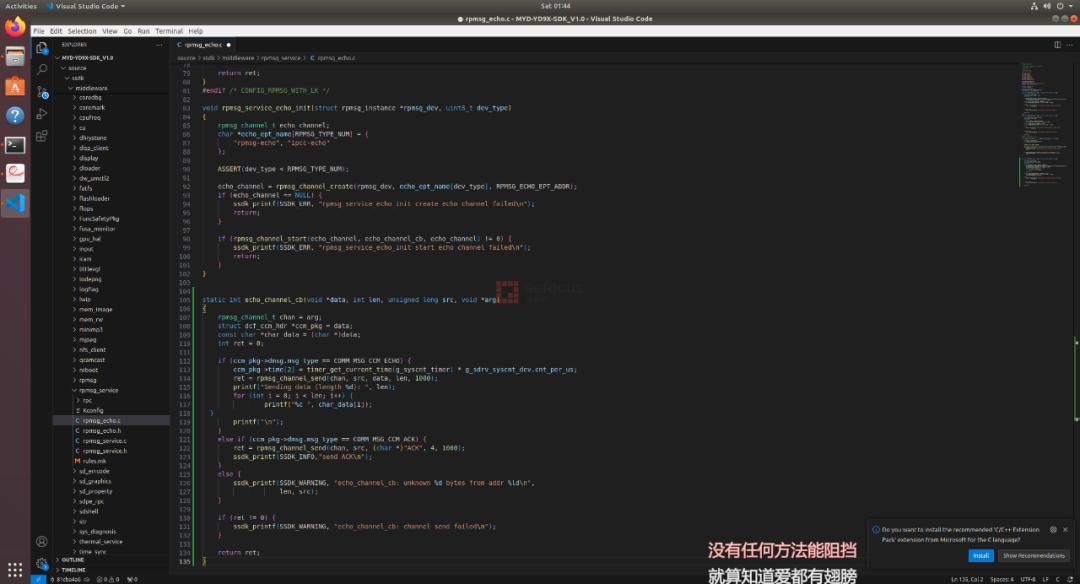
选中此选项编译进内核,将串口线(debug)接到10_TX,10_RX和GND,打开终端调试工具。编辑source/ssdk/ middleware/rpmsg_service/rpmsg_echo.c文件,添加代码如下:
static int echo_channel_cb(void *data, int len, unsigned long src, void *arg){ rpmsg_channel_t chan = arg; struct dcf_ccm_hdr *ccm_pkg = data; const char *char_data = (char *)data; int ret = 0;
if (ccm_pkg->dmsg.msg_type == COMM_MSG_CCM_ECHO) { ccm_pkg->time[2] = timer_get_current_time(g_syscnt_timer) * g_sdrv_syscnt_dev.cnt_per_us; ret = rpmsg_channel_send(chan, src, data, len, 1000); printf("Sending data (length %d): ", len); for (int i = 8; i < len; i++) { printf("%c ", char_data[i]); } printf("\n"); } else if (ccm_pkg->dmsg.msg_type == COMM_MSG_CCM_ACK) { ret = rpmsg_channel_send(chan, src, (char *)"ACK", 4, 1000); ssdk_printf(SSDK_INFO,"send ACK\n"); } else { ssdk_printf(SSDK_WARNING, "echo_channel_cb: unknown %d bytes from addr %ld\n", len, src); }
if (ret != 0) { ssdk_printf(SSDK_WARNING, "echo_channel_cb: channel send failed\n"); }
return ret;}
A55发送数据给R5
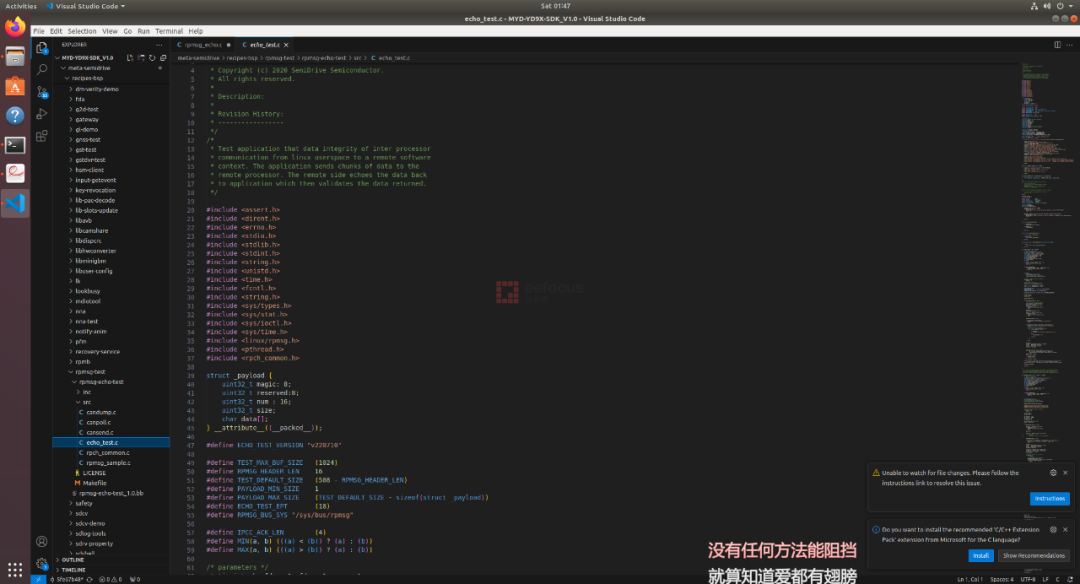
自定义一个发送和接收字符串的函数,如下:
int send_receive_string(int fd, const char *send_str,int ntimes, int seconds) { int i = 0, j = 0; int size, bytes_rcvd, bytes_sent; long elapse = 0;
err_cnt = 0; i_payload = (struct _payload *)malloc(sizeof(struct _payload) + payload_max_size); r_payload = (struct _payload *)malloc(sizeof(struct _payload) + payload_max_size);
if (i_payload == 0 || r_payload == 0) { printf("ERROR: Failed to allocate memory for payload.\n"); return -1; }
if (seconds) gettimeofday(&start_test, NULL);
i_payload->magic = 0xA5;
for (j = 0; j < ntimes; j++) { i_payload->num = i; i_payload->size = size; strcpy(i_payload->data, send_str);
if (verbose) printf("\r\n sending payload number"); if (verbose) printf(" %d of size %lu\r\n", i_payload->num, (sizeof(struct _payload)) + strlen(i_payload->data));
bytes_sent = write(fd, i_payload, sizeof(struct _payload) + strlen(i_payload->data)); if (bytes_sent <= 0) { if (verbose) { perror("\r\n Error sending data\n"); break; } else fprintf(stderr, "#");
err_cnt++; continue; } printf("send string:%s\n",i_payload->data);
r_payload->num = 0; bytes_rcvd = read(fd, r_payload, sizeof(struct _payload) + payload_max_size); while (bytes_rcvd <= 0) { usleep(10000); bytes_rcvd = read(fd, r_payload, sizeof(struct _payload) + payload_max_size); } r_payload->data[bytes_rcvd] = '\0'; printf("receive string:%s\n",r_payload->data);
if (interval) sleep(interval); }
free(i_payload); free(r_payload);
return 0;}
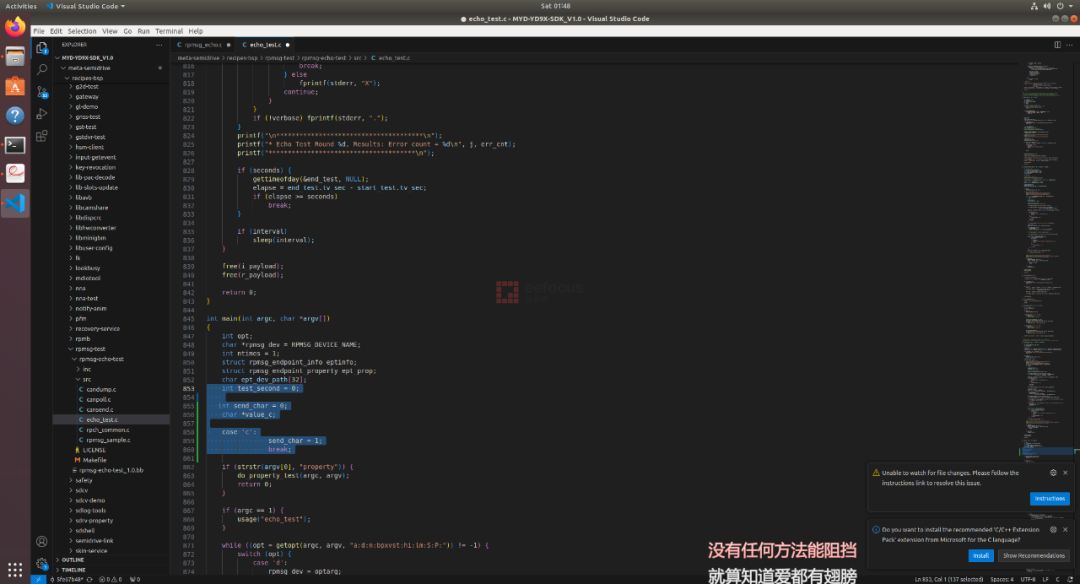
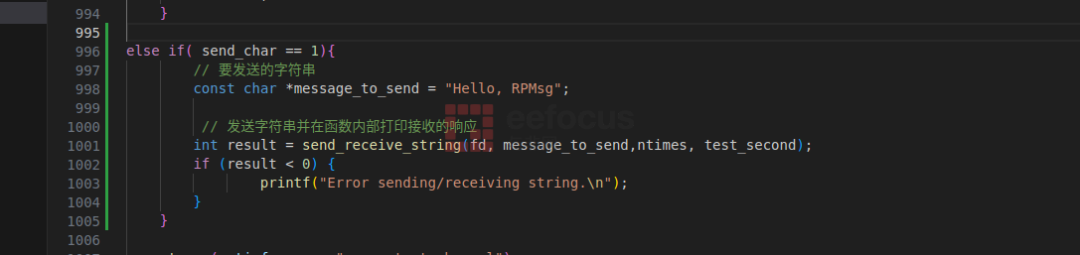
在main函数内添加新增函数条件:
编辑source/linux/ drivers/rpmsg/virtio_rpmsg_bus.c文件,代码如下:
保存所有代码
编译系统 烧录
1.5结果显示
在R5核调用rpmsg_test例程,向A55核发送信息
R5界面>rpmsg_test send 0 3 1>Sent: 123456789Received: 123456789
>rpmsg_test send 1 3 1>Sent: 123456789Received: 123456789
A55界面root@myd-jd9x:~# [ 22.223170] virtio_rpmsg_bus virtio0: virtio send susses[ 34.943644] sd,rpmsg-ipcc soc:ipcc@1: ipcc send susses
在A55核调用echo_test例程,向R5发送信息,打印如下:
A55界面root@myd-jd9x:~# echo_test -d virtio0.rpmsg-echo.-1.30 -c 1
Echo test startupdate rpmsg-mtu=496 from kernelsend string:Hello,RPMsg!receive string:Hello,RPMsg!
R5界面>Sending data (length 20): H e l l o , R P M s g !
MYC-YD9360核心板及商显板
- 采用国产CPU:集成了6个ARM Cortex-A55@1.6GHz 高性能CPU和1个ARM Cortex-R5@800MHz;
- 高性能的高安全HSM安全的处理器,支持TRNG、AES、RSA、SHA、SM2/3/4/9;
- 它包含100GFLOPS 3D GPU以及H.264和H.265/VP8/VP9视频编/解码器,三屏异显;
- 集成 PCIe3.0,USB3.0,2x千兆TSN以太网,4xCAN-FD,16xUART,SPI 等丰富的外设接口;
- 工业级-40℃~85℃,邮票孔324PIN引脚,尺寸为52mmx50mm。
- 应用:高端商显、新一代电力智能设备、工业互联网设备、工业控制设备、工业机器人、工程机械、轨道交通等

-
 huangjiacheng00
2024-07-25
0 回复 举报D9350的SDK,配置界面缺少很多内容,请问最新SDK有更新吗,需要去哪儿下载最新的 收起回复
huangjiacheng00
2024-07-25
0 回复 举报D9350的SDK,配置界面缺少很多内容,请问最新SDK有更新吗,需要去哪儿下载最新的 收起回复
-
【米尔-芯驰D9360商显板试用评测】2、配置QT开发环境2024-04-01 4106
-
【米尔-芯驰D9360商显板试用评测】3、LED闪起来2024-04-02 4597
-
【米尔-芯驰D9360商显板试用评测】成功解决QCamera的模块调用,并编写简单的查找摄像头程序2024-04-07 4481
-
【米尔-芯驰D9360商显板试用评测】米尔-芯驰D9360商显板开发环境搭建2024-04-09 3365
-
【米尔-芯驰D9360商显板试用评测】使用ffmpeg实现远程视频监控2024-04-11 4163
-
【米尔-芯驰D9开发板- 国产平台试用】-- 01 -- 开箱上电2023-08-16 6580
-
米尔-芯驰D9360商显板-国产六核CPU开发板2024-01-09 1015
-
米尔-芯驰D9360商显板开发环境搭建2024-04-10 2349
-
新品预告 | 高实时性 芯驰D9 Pro工业级核心板即将来袭2025-06-13 2020
-
不一样的芯驰D9核心板,眺望电子D9360核心板设计全解析2025-09-05 1611
-
深入芯驰D9360核间通信案例,RPMSG关键技术深度剖析2025-09-10 1606
全部0条评论

快来发表一下你的评论吧 !
