

友思特案例 | 自研创新!三维工件尺寸测量及点云处理解决方案
电子说
描述
导读
3D相机等新型传感器的发展克服了传统工件尺寸测量的各种局限,可获取丰富的三维点云数据。友思特提供了一种工件3D尺寸测量和点云处理方案,结合自研3D软件,使得工件三维尺寸自动化测量与数据分析流程更加高效而精确。
现代制造业对于工件的尺寸测量要求越来越高,而传统的尺寸测量方法在效率和准确性方面存在局限性。随着3D相机、激光雷达、OCT设备、三维扫描仪和其他新型传感器的发展,我们能够轻松采集到大量的三维点云数据。通过对点云数据进行分析,我们可以得到目标的三维尺寸,从而满足我们的测量需求。
然而,点云数据的处理和工件尺寸测量仍然面临一些挑战:
点云数据中存在噪声和缺失,需要经过一系列的处理、滤波、补全等步骤来提高数据质量;
从海量的点云数据中提取出工件的关键特征点并进行尺寸测量具有一定难度;
传统尺寸测量方式难以实现效率和精度的平衡。
友思特工件3D尺寸测量&点云处理方案

某汽车制造上游厂家,与友思特达成合作,通过友思特工件3D尺寸测量&点云处理方案,实现测量汽车部件三维尺寸的自动化流程,替代传统人工使用仪器测量的方式,达到准确率和效率的平衡。
使用VST-MD300高精度扫描设备,结合友思特自研的Viewsitec 3D软件,对扫描结果自动获取点云并执行测量操作,一键输出各指标测量结果。
测量需求
测量孔的内径、定位、所在平面的平面度等;
不同测量项目精度不同,误差范围覆盖5μm到100μm;
工件最大尺寸为320*251*154(mm),单个工件测量时间在1min以内。
测量流程
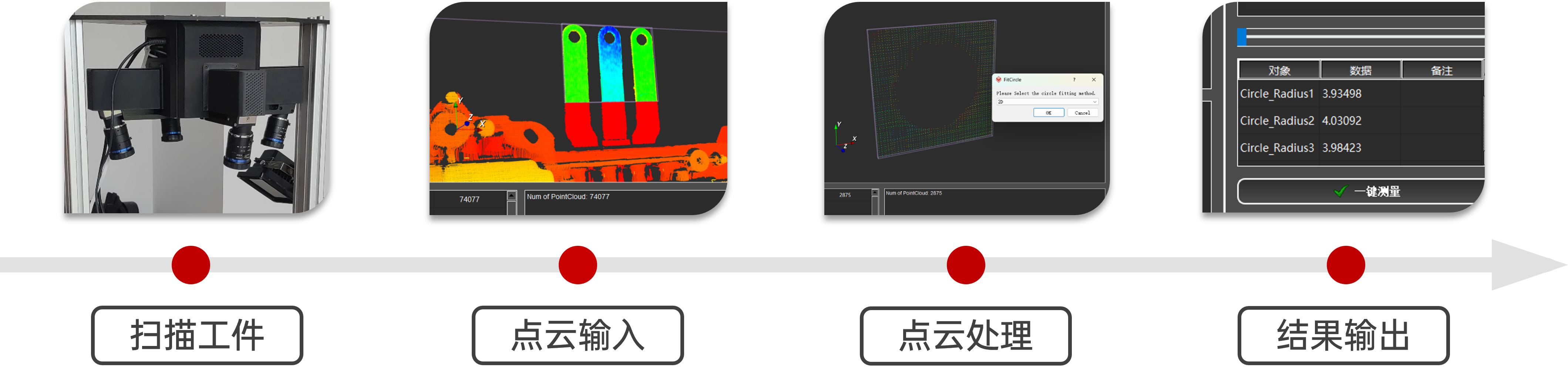
1、扫描工件
架设设备,对设备进行标定,并用标准量块校正,确保设备的扫描精度满足需求。然后放置工件,使用定位基准卡位确保工件在预设位置范围。
2、点云输入
设备扫描工件,获取点云,输入点云处理软件并进行颜色渲染。
3、点云处理
执行点云滤波、补全等操作,进行点云基准的确定和校正,分割点云、轮廓提取和形状拟合并存储各数值结果。
4、结果输出
计算各测量结果,输出测量结果并存储、显示,完成一个工件的三维尺寸测量。
测量结果
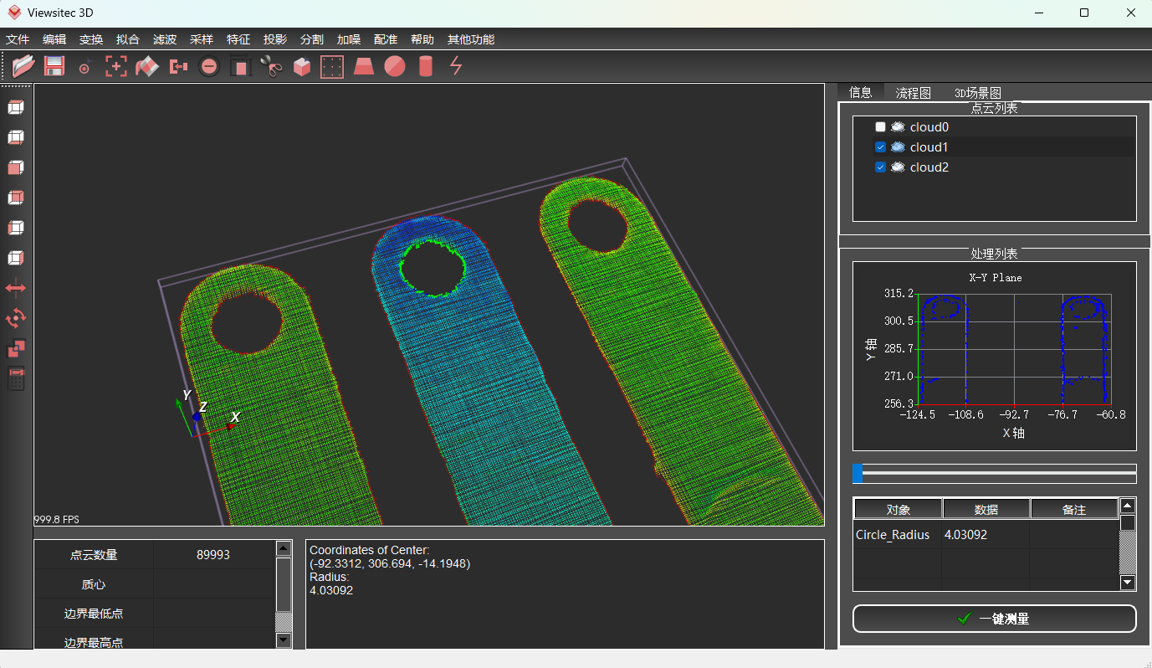
截取点云、颜色渲染、圆孔拟合
圆孔中心定位、圆孔半径测量
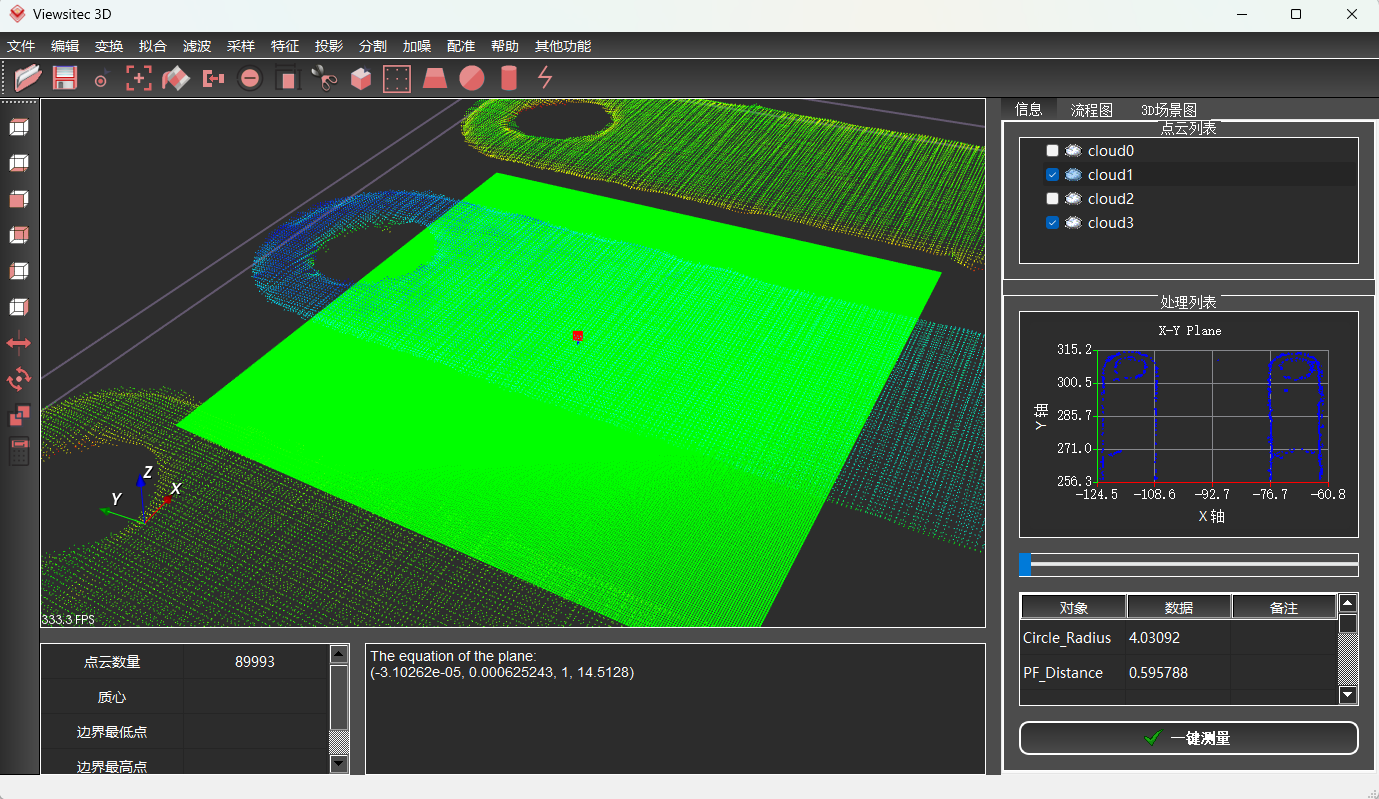
引脚平面拟合
引脚平面距离测量
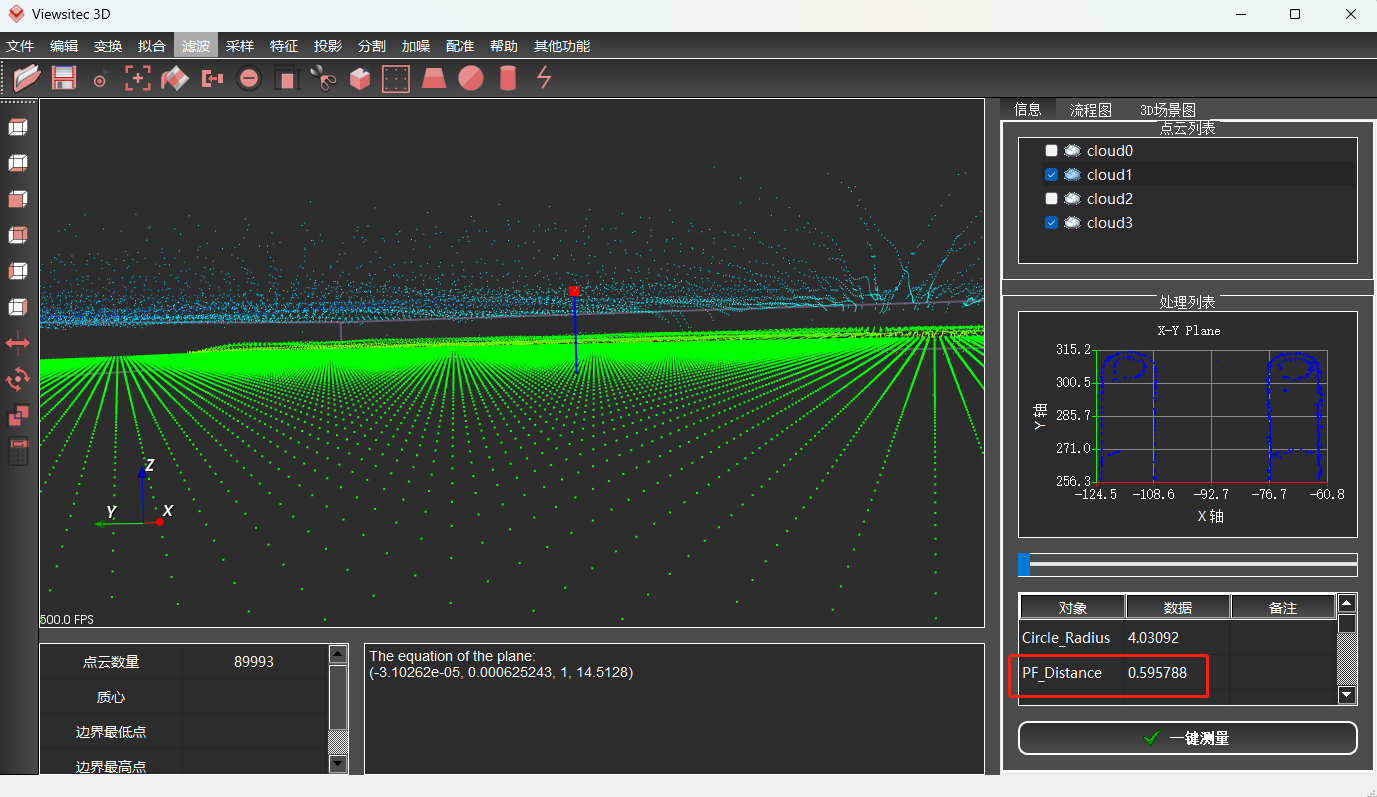
点到面距离测量和输出显示
等高点云截取输出显示
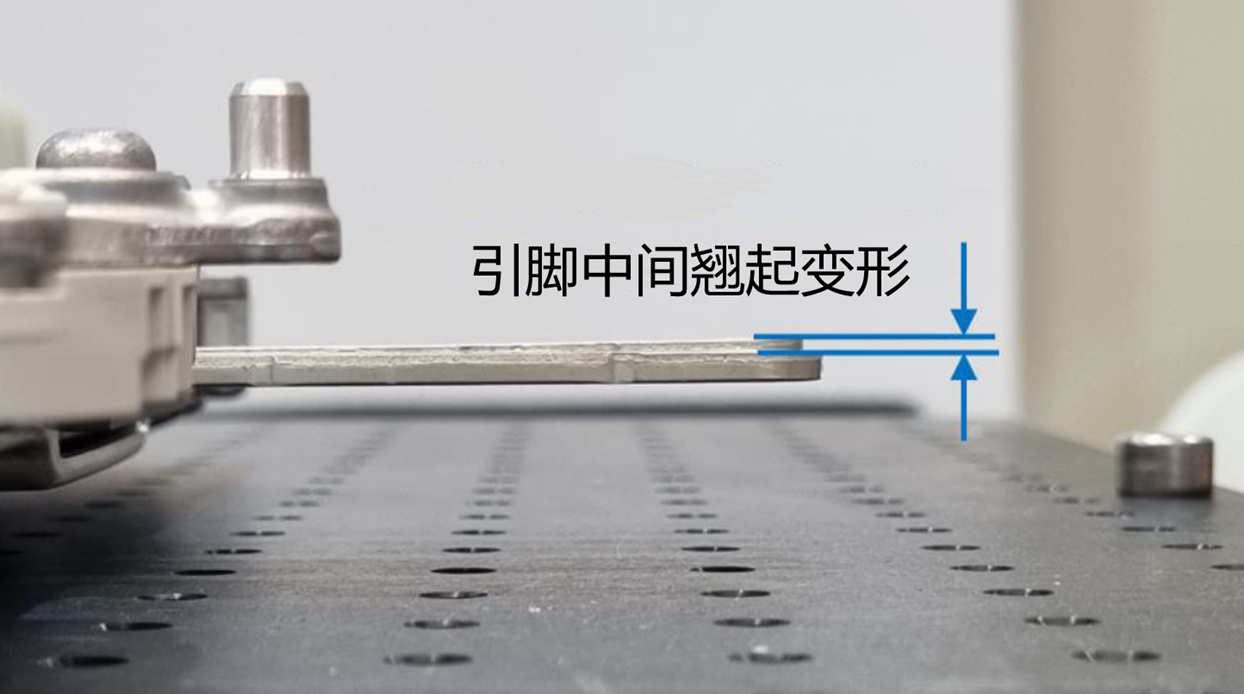
引脚实物图,三根引脚,中间引脚翘起变形
在软件的点云中可以看到并测量变形尺寸
方案套装产品配置
VST-MD300:高精度三维扫描设备
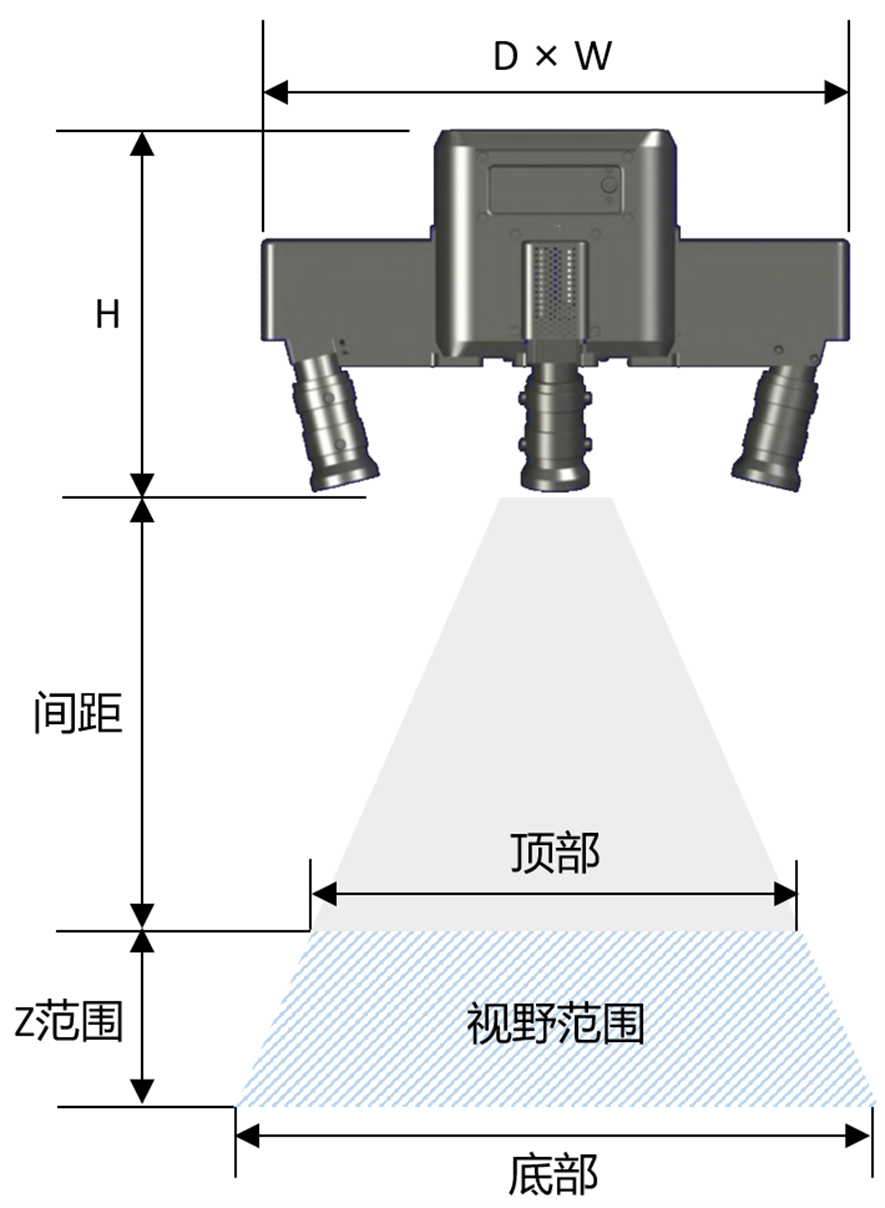
配备基于MEMS的激光投影仪,没有机械振动且不需运动同步,可以实现固定扫描,有助于达到更好的性能;
选择性分辨率,以非常高的分辨率扫描重点位置,忽略非重点位置,达到精度和速度的平衡。
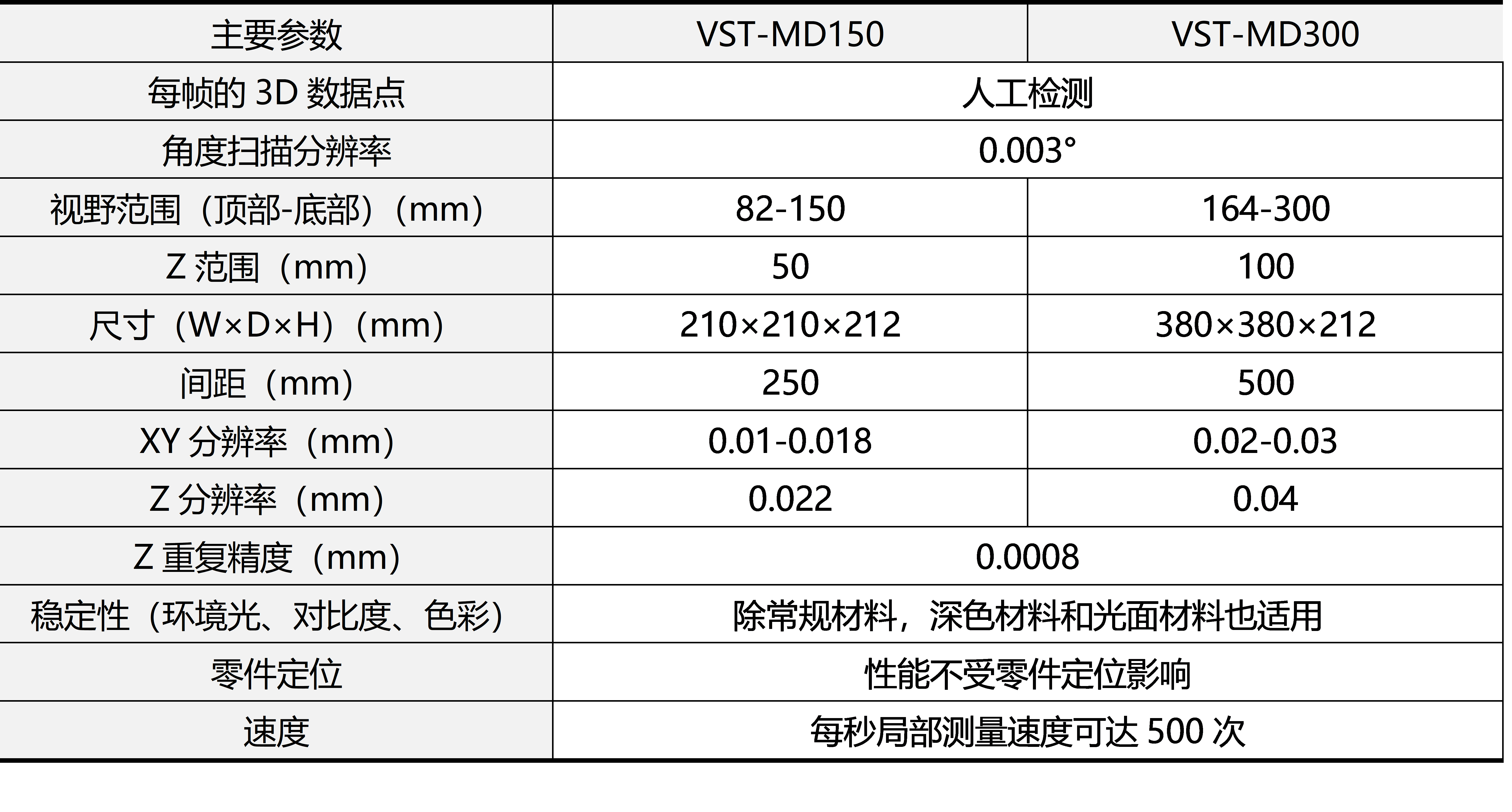 友思特扫描设备参数与性能
友思特扫描设备参数与性能
Viewsitec 3D软件:自研创新平台
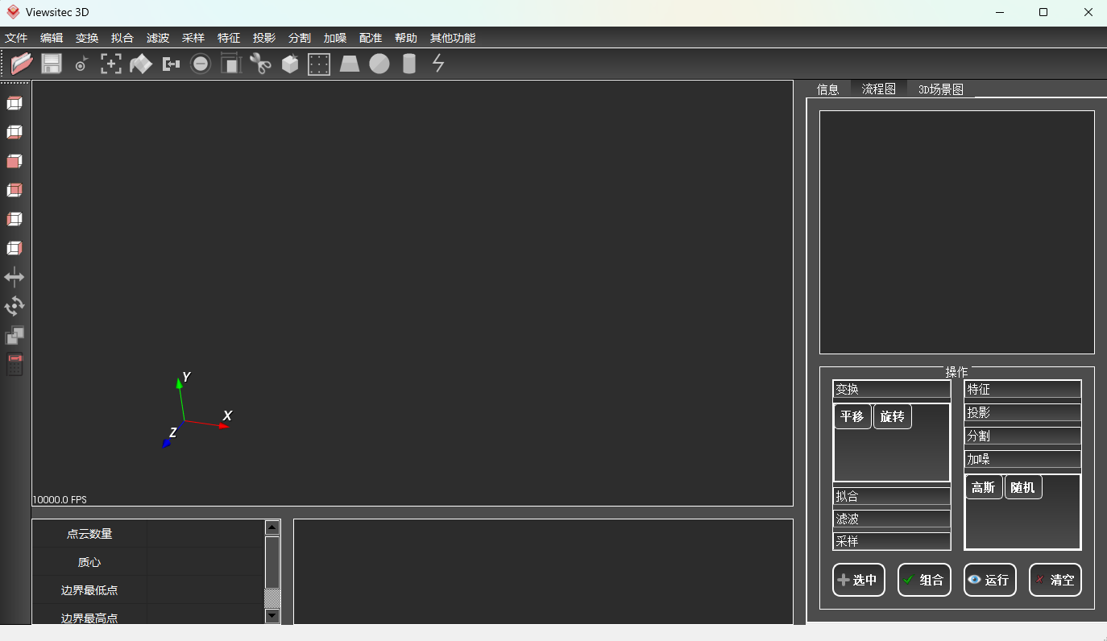
友思特自研的基于点云处理的3D测量软件,集成了点云渲染、拟合、滤波、采样、特征提取、分割、配准等四十多项功能,并优化界面显示,以简单的操作方式和数据呈现,实现根据客户需求进行自定义开发的功能。其中,一键测量功能根据客户需要测量的内容,自由组合多个功能函数,一键完成所有测量项目并输出测量结果。
审核编辑 黄宇
-
AI 驱动三维逆向:点云降噪算法工具与机器学习建模能力的前沿应用2025-08-20 985
-
友思特方案 基于三维点云实现PCB装配螺丝视觉检测2024-08-28 1277
-
3D三维尺寸测量设备介绍2023-12-20 2252
-
SMARTSCAN三维扫描仪电子产品配件三维扫描服务2020-09-17 2166
-
Handyscan汽车三维扫描服务尺寸检测的应用2020-08-04 1732
-
广州工件形变量三维扫描全尺寸检测尺寸比对服务2020-07-21 1214
-
MetraSCAN三维扫描仪对汽车钣金件三维扫描检测解决方案2020-07-15 1749
-
广西扫描服务三维检测三维扫描仪2018-08-29 6095
-
整车三维扫描及其零部件三维扫描解决方案2018-08-21 3409
-
成功扫描中大工件齿板是一种什么体验?2017-08-22 2438
-
如何快速高效的完成汽车前盖板的三维检测?2017-08-11 4565
-
精密铸造+三维扫描=机械制造完美解决方案2017-08-09 3464
-
什么让三维扫描数据栩栩如生2017-08-02 4933
-
【转】三维扫描仪对变速箱壳体质量检测,让每辆汽车安全上路!2017-07-18 4340
全部0条评论

快来发表一下你的评论吧 !
