

基于MSP430单片机的光电跟踪伺服系统研究方案
模拟技术
描述
研究设计中利用光敏感器件对特定光波长范围的光信号敏感原理,将四象限光电位置探测器与MSP430系列单片机相结合,根据四象限光电探测器输出电压与光斑位置的线性关系,通过数字PID闭环控制输出电压调节单片机输出PWM 的占空比来实现精确稳定的搜寻和小范围跟踪目标。
0 引言
光电跟踪系统是以光电器件(主要是激光器和光电探测器)为基石,将光学技术、电子/微电子技术和精密机械技术等融为一体,形成具有特定跟踪功能的装置。
目前国内外较先进的光电跟踪系统多以激光测距仪、电视跟踪仪和红外跟踪仪三位一体为核心构成。采用机械方法实现跟踪系统控制起来还不太灵敏。对于一个光电追踪系统,一般通过目标识别、位置信号检测、位置信号处理、PID伺服控制计算、驱动控制、位置反馈、目标不间断跟踪,完成特定跟踪任务。而与之配套的目标识别检测处理与PID 伺服控制实现是非常重要的部分,是保证整个系统能否正常工作的关键。
为更好地实现精确的跟踪伺服系统,本方案中使用MSP430 单片机完成对目标定位跟踪的PID 闭环控制,采用S066A 的国产四象限探测对目标进行识别跟踪定位。MSP430 单片机是美国TI(德州仪器)公司近年推出的16 位高性能混合信号处理器。由于它具有处理能力强、运算速度快、集成度高、外部设备丰富、超低功耗等优点,因此在许多领域内都得到了广泛的应用。S066A 国产四象限探测器光谱响应范围在400~1 100 nm,它的峰值波长为940 nm,它具有较高的灵敏度和精确度,广泛运用于位置检测,光学定位,距离探测等方面。
本研究方案的意义在于一方面对四象限探测器件以及新式低功耗高集成的微处理器的使用和推广;另一方面探索一种新的机械对准结构设计以及为低成本跟踪系统的研制提供一种可行性方案。
1 总体设计方案
整个系统的设计如图1 所示,主要由机械传动设计和系统电路设计两部分组成。
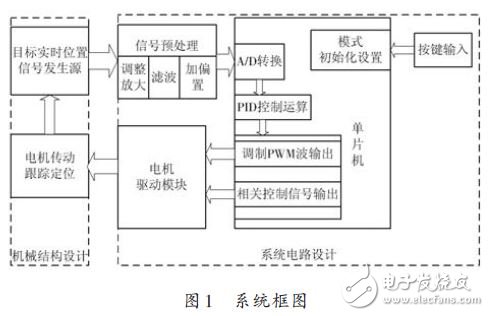
机械部分中目标实时位置信号发生源采用四象限探测器对目标进行定位,并输出包含目标位置信息的4 路电信号,电机传动跟踪定位则是根据四路位置信号来驱动探测器所在的定位面板对目标进行搜索和锁定。机械部分将探测和定位集为一体,目标可见即可识,电机与定位面板的传动以角位移为变量进行快速方便的传动。系统电路设计部分中MSP430F169 片内集成了多个功能模块。
本设计利用其作为处理核心,其片内A/D模块实现模拟信号与数字信号的转换。一方面Timer 对时钟进行分频从而提高时钟频率,使A/D获得更快的采样率或转换速度,以保证A/D 转换的精度;另一方面Timer的输出端单元可作为PWM信号发生器根据片内编程进行PID 高速运算处理所得结果产生PWM 输出控制信号,设置简单方便简化了电路的设计,进而降低了系统设计的复杂性。接收前端的位置信号使用低偏置,高精密度放大器对信号进行调整,利用滤波器对位置信号进行优化,以满足更好的精度和定位要求。在控制信号输出端采用现有的电机驱动芯片确保电机的稳定运行。基于总体设计方案,本文将其划分为4个不同但又彼此相互作用的4个方面来实现该研究。具体包括硬件电路设计、机械模拟模型设计、PID算法设计以及软件编程。
2 硬件模块设计
2.1 硬件电路设计原理
依据总体设计方案,硬件电路主要由电源模块、四象限信号放大处理模块、系统控制模块、电机驱动模块以及相关辅助模块构成(见图2)。
四象限探测器可探测波长范围(380~1 100 nm),其原理是将光照强度转换为电流信号。但由于其输出电流信号较小,四象限探测器的预处理模块电路实现将电流信号经放大和运算处理,并将电流转化为单片机A/D能够采集到电压范围0~2.5 V.采样的数字信号经单片机内的数字滤波和算法的运算,进而控制PWM波的占空比来调节电机的速度。
2.2 机械模拟机构实验设计原理
模拟机构设计灵感源于地动仪的设计原理,采用两个不同的轴来调节两个不同但相关的平面实现四象限探测器的大范围搜寻目标的目的,模型图如图4所示。
其中下平板主要用于带动上平板实现大范围搜寻目标,上平板及其配置设备实现精确定位和跟踪功能。研究中利用皮筋的弹性以及牵引丝线柔软且形变相对较小的优势,实现搜索平面的任意角度转动。并利用废弃的中心笔管代替齿轮实现轴的小摩擦先转动。使得模型轻小便捷,制作简单方便,并且变废为宝。

四象限放大处理电路如图3所示。

3 软件编程
软件编程部分主要包括目标的粗搜寻和目标的精定位及跟踪两个部分。编程中载入自动搜索程序搜寻目标光源,对目标进行三维维的空间片区性搜索,并载入判别搜到目标程序,具体通过A/D采集到的电压范围判别是否搜到目标。目标一旦搜到,即载入坐标运算程序,计算当前四象限面板与目标位置的归一化坐标差值,进而调用PID 算法程序,将PID 的调节量转化为PWM 波的输出持续时间和占空比,通过调用控制电机转动圈数程序对目标进行追踪。通道误差计算程序如图5所示。


4 PID控制算法设计
PID 算法主要有位置式算法和增量式算法两类。
一般增量式算法适用于控制精度要求不高的系统中,位置式适用于控制精度要求较高的控制系统中。
由于位置式控制算法会出现积分饱和问题。工程中通常采用的消除积分饱和问题的方法有限制PI调节器输出的方法、积分分离法和欲限削弱积分法。由于限制PI调节器输出法有可能在正常操作中不能消除系统的余差,而积分法可以在小偏差时利用积分作用消除偏差。因此本文选用位置式算法的改进形式,即积分分离法。
采用的PID控制算法的公式如下式(1)所示:4 PID控制算法设计PID 算法主要有位置式算法和增量式算法两类。
一般增量式算法适用于控制精度要求不高的系统中,位置式适用于控制精度要求较高的控制系统中[4]。
由于位置式控制算法会出现积分饱和问题。工程中通常采用的消除积分饱和问题的方法有限制PI调节器输出的方法、积分分离法和欲限削弱积分法。由于限制PI调节器输出法有可能在正常操作中不能消除系统的余差,而积分法可以在小偏差时利用积分作用消除偏差。因此本文选用位置式算法的改进形式,即积分分离法。
采用的PID控制算法的公式如下式(1)所示:

PID算法程序流程图如图6所示。研究中控制参数的确定采用先选定控制度,依据不同的控制度预设控制参数通过实验输出波形,调整控制参数取值,从而达到研究期望的控制精度。

5 测试结果及分析
实验中采用波长为650 nm 激光作为目标物,实验过程中先调用目标搜寻程序,大范围搜寻目标,一旦探测到目标,四象限探测器即会有较大电流输出。通过磁性判断转入目标精定位及追踪程序。利用PID 算法配合调节电机转动,使光斑移至四象限光敏面中心。实验结果如图7所示。
本设计采用性能优越的MSP430F169 作为控制核心。使用MSP430内部的A/D模块以及定时器模块能够实现精准的多路数据采集。外围电路的设计,利用RC滤波器,减小了噪声对信号的影响,同时利用相位补偿技术消除了自激干扰,使信号稳定输出。软件编程部分采用位置式PID算式,当达到设定的门限值之后再加入积分运算,这样就能够避免积分饱和问题,使跟踪设备平缓地到达指定位置。
6 结语
本研究方案中采用性能优越的MSP430F169 作为控制核心。通过四象限光电探测器将光照强度转化成电流信号,经过四象限信号处理电路转化成MSP430F169单片机ADC能够采集到的电压范围,利用PID 算法及相关转化控制两路PWM 波输出控制电机转动,实现目标定位跟踪。通过使用激光器将定位和追踪过程直观显示,便于直接观察。使用MSP430内部A/D 模块和时钟模块能够快速实现精准的PID 误差信号与PWM波占空比的转换。
该研究方案一方面对四象限探测器件以及新式低功耗高集成的微处理器的使用和推广;另一方面探索一种新的机械对准结构设计以及为低成本跟踪系统的研制提供一种可行性方案。
-
 焦保刚
2015-09-19
0 回复 举报你这个怎么排除其他光的干扰,有调制和解调部分吗? 收起回复
焦保刚
2015-09-19
0 回复 举报你这个怎么排除其他光的干扰,有调制和解调部分吗? 收起回复
-
 sherlock颖
2014-03-11
0 回复 举报好强大的感觉,下了再说 收起回复
sherlock颖
2014-03-11
0 回复 举报好强大的感觉,下了再说 收起回复
-
MSP430系列单片机(1)——基本知识2021-11-19 1229
-
采用MSP430F169单片机实现光电跟踪装置的设计2018-12-24 6965
-
MSP430单片机ADC模数转换操作2018-05-08 1619
-
MSP430单片机实践篇之MSP430单片机ADC模数转换操作2018-04-28 1969
-
基于MSP430单片机的GPS定位系统设计2017-10-13 1097
-
MSP430教程14:MSP430单片机ADC12模块2017-10-12 1531
-
基于MSP430单片机的测速系统设计_金华2017-03-17 1430
-
MSP430单片机2016-12-17 942
-
MSP430单片机软件工程开发基础2016-07-15 966
-
MSP430单片机应用系统开发平台的研究2016-02-17 518
-
MSP430单片机C语言的基本结构2016-01-11 985
全部0条评论

快来发表一下你的评论吧 !
