

Model3C芯片HMI方案:86彩屏中控面板Modbus协议说明
描述
一、概述
Model3C芯片是一款基于RISC-V的高性能、国产自主、工业级高清显示与智能控制MCU,配备强大的2D图形加速处理器、PNG/JPEG解码引擎,并支持工业宽温。基于Model3C芯片的86彩屏中控面板,通过集成Modbus协议,实现了与多种控制设备的通信和数据交换。

二、Modbus协议简介
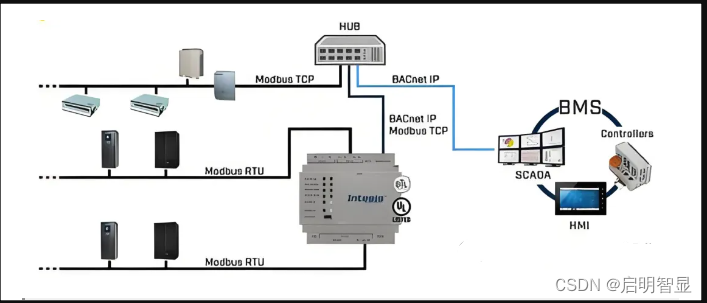
Modbus协议是应用于电子控制器上的一种通用语言。通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其他设备之间可以通信。它已经成为一通用工业标准,使得不同厂商生产的控制设备可以连成工业网络,进行集中监控。
此协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。它描述了一控制器请求访问其它设备的过程,如何回应来自其它设备的请求,以及怎样侦测错误并记录。它制定了消息域格局和内容的公共格式。当在一Modbus网络上通信时,此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。如果需要回应,控制器将生成反馈信息并用Modbus 协议发出。在其它网络上,包含了 Modbus 协议的消息转换为在此网络上使用的帧或包结构。这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。
三、Modbus RTU在Model3C芯片方案中的应用
通信接口:Model3C芯片方案支持RS-485接口,该接口是Modbus RTU常用的串行通信接口之一。通过RS-485接口,86彩屏中控面板可以与其他Modbus设备(如PLC、传感器等)进行通信。
通信参数:在Model3C芯片方案中,Modbus RTU通信采用异步通讯模式,具体参数包括1位起始位、8位数据位、1位停止位、无校验位,波特率可根据实际需求进行配置(如常用的9600波特率)。
报文格式:Modbus RTU报文包括设备地址、功能码、数据域和CRC校验码等部分。在Model3C芯片方案中,这些报文格式遵循Modbus协议规范,确保通信的准确性和可靠性。
主从通信:在Modbus RTU通信中,Model3C芯片方案的86彩屏中控面板可以作为主设备(Master)或从设备(Slave)进行通信。作为主设备时,它可以主动发起查询请求;作为从设备时,它可以响应主设备的查询请求并提供相关数据。
功能码:Modbus协议定义了多种功能码(如读取线圈状态、写入线圈状态、读取保持寄存器等),用于实现不同的通信功能。
在Model3C芯片方案中,这些功能码得到了全面支持,使得86彩屏中控面板可以实现与多种Modbus设备的灵活通信和数据交换。
四、rt-thread 使用libmodbus-rtu库
libmodbus是一个与使用Modbus协议的设备进行数据发送/接收的库。该库包含各种后端通过不同网络进行通信(例如,RTU模式下的串口或TCP / IPv6中的以太网)。
将libmodbus库从软件包里启用, libmodbus是基于select操作的,依赖于文件系统和libc,需要在rt-thread中开启对应的支持。
RS485的话需要指定 modbus_rtu_set_serial_mode(ctx, MODBUS_RTU_RS232); //改为485
modbus_rtu_set_rts(ctx, RS485_RE, MODBUS_RTU_RTS_UP); //指定485控制引脚和电平
#include “modbus_rtu_test.h” #include “modbus.h” #include “stdio.h” #include “string.h” #include #include /* 使用BSD socket,需要包含socket.h头文件 */ #include #include #include #define RS485_RE GET_PIN(G, 8) static void test_thread(void *param) { int slaveaddrs = 3; uint16_t tab_reg[64] = {0}; modbus_t *ctx = RT_NULL; ctx = modbus_new_rtu("/dev/uart2", 9600, ‘N’, 8, 1); modbus_rtu_set_serial_mode(ctx, MODBUS_RTU_RS232); //modbus_rtu_set_rts(ctx, RS485_RE, MODBUS_RTU_RTS_UP); modbus_set_slave(ctx, slaveaddrs); modbus_connect(ctx); modbus_set_response_timeout(ctx, 0, 200000); //50ms int num = 0; while (1) { memset(tab_reg, 0, 64 * 2); int regs = modbus_read_registers(ctx, 0, 20, tab_reg); if (regs == -1) { rt_kprintf(“error addrs %d—\n”, slaveaddrs); if(slaveaddrs == 2) { slaveaddrs = 3; } else { slaveaddrs = 2; } modbus_set_slave(ctx, slaveaddrs); } else { rt_kprintf("-->addrs %d", slaveaddrs); rt_kprintf("[%4d][read num = %d]", num, regs); num++; int i; for (i = 0; i < 20; i++) { rt_kprintf("<%#x>", tab_reg[i]); } rt_kprintf("\n"); if(slaveaddrs == 2) { slaveaddrs = 3; } else { slaveaddrs = 2; } modbus_set_slave(ctx, slaveaddrs); } rt_thread_mdelay(500); } //7-关闭modbus端口 modbus_close(ctx); //8-释放modbus资源 modbus_free(ctx); } static void rtu77(int argc, char **argv) { //rt_pin_mode(RS485_RE, PIN_MODE_OUTPUT); rt_thread_t tid; tid = rt_thread_create(“test”, test_thread, RT_NULL, 2048, 12, 10); if (tid != RT_NULL) rt_thread_startup(tid); return RT_EOK; } MSH_CMD_EXPORT(rtu77, a rtu test);
五、Modbus RTU布线
Modbus RTU使用串行通信,通常使用RS-232或RS-485接口。
RS-232:这是一种点对点的通信方式,每个设备都需要单独的串行线连接到主控器。它使用9针或25针的D-sub连接器,但通常只用到其中的少数几个引脚,如TX(发送)、RX(接收)、GND(地线)。
RS-485:这是一种多点通信方式,允许多个设备共享同一对双绞线。RS-485使用一对双绞线(通常标记为A和B),并使用终端电阻来匹配线路。每个设备都有一个数据发送器(TX)和数据接收器(RX)引脚,以及一个公共地线(GND)。
六、Modbus RTU特点
以RS-485或RS-232作为其物理层实现。它使用总线式拓扑结构,允许多个设备共享同一通信线路,实现成本效益和简单的布线需求。Modbus RTU的数据传输采用二进制编码,每个数据帧包含地址码、功能码、数据和校验码,通过CRC校验确保数据的准确性。这种协议特别适合于短距离通信和成本敏感的应用场景。
七、总结

基于Model3C芯片的86彩屏中控面板通过集成Modbus RTU协议,实现了与多种控制设备的通信和数据交换。其高性能的通信接口和丰富的通信功能使得该中控面板在工业控制、智能建筑等领域具有广泛的应用前景。
Model系列芯片芯片基于RT-Thread进行开发,而RT-Thread可以通过集成第三方库来支持Modbus RTU,因此Model系列芯片完全可以支持Modbus RTU协议
-
个位数价国产工业级HMI芯片Model3C,驱动QSPI双屏!2026-01-06 643
-
谁说低价没有好方案?Model3C彩屏仪表HMI芯片方案强势破局!2025-05-27 1020
-
性价比爆表!这款 86 中控彩屏方案,为你的智能升级省钱又省心2025-03-25 1029
-
【技术分享】CAN总线相关知识探讨以及Model3C两路CAN的应用2024-09-05 2121
-
个位数价!工业级HMI芯片Model3C点亮智能烹饪机4.3寸触摸彩屏2024-08-08 1372
-
工业级HMI芯片Model3C详解(二)图像显示2024-06-21 1320
-
Model3C工业级HMI芯片详解系列专题(一):芯片性能2024-06-20 2015
-
Modbus协议的理解2023-05-05 1086
-
工业通讯应用中主流的常用协议Modbus协议2023-04-19 2703
-
一文读懂Modbus协议2022-10-28 3349
-
LabVIEW编程LabVIEW开发Modbus协议讲解2022-01-25 9446
-
Modbus协议是什么2021-09-29 2066
-
modbus协议笔记2021-07-02 1837
-
Modbus协议应用2016-09-06 931
全部0条评论

快来发表一下你的评论吧 !
