

基于单片机PIC16F74的电动按摩椅的研制
控制/MCU
描述
1:引言
随着我国经济的迅速发展和人们生活水平的不断提高,按摩椅等保健产品越来越受到欢迎。目前,在电动按摩椅市场上,进口、合资以及国产产品并存。相对而言,进口产品功能强大、按摩方式丰富、外观优美,但同时其价格也非常昂贵。而国内产品功能较简单,产品知名度也相对较低,但是其价格比较低廉。本文主要介绍了一款自主研发的中档电动按摩椅。该产品既有功能比较强大、按摩方式比较丰富、结构简单、外观优美、控制方式简单灵活,产品容易升级的特点,同时其价格却只有国外同等产品的一半。
2:按摩椅系统的组成、工作原理及其功能实现
2.1:系统组成
整个系统主要分为两个部分,即背部按摩区域和臀部、下肢按摩区域。
背部按摩区域的机构主要有:系统控制电路板、电动机、丝杆及其润滑装置、S形滑动槽、按摩头功能盒等。同时根据人体结构又将背部整个区域划分为颈部、中部、腰部以及尾椎四个按摩区间。而臀部、下肢按摩区域的机构主要有12个
按摩气囊及其实现机构。此外系统主要还有手控面板,红外线探测系统,靠背、小腿架处的电动推杆等。
2.2:系统工作原理及结构功能特点
由于PIC单片机具有成本低,功能丰富,控制方式简单等优势,因此系统采用PIC16F74单片机作为系统的控制芯片。
系统设计为自动和手动两种运行模式。在自动模式下,按摩模式主要有:快速消除疲劳模式、休闲模式、睡眠模式以及适合于老人使用的轻柔模式等。而在手动方式下,可以启停任意电机和按摩气囊。并可根据实际情况,选择需要的按摩力度、宽窄和气囊按摩压力。系统所有的按摩功能均具有三档速度调节。
背部机构根据人体的背部生理曲线科学地设计为S形结构。其背部机构的主要功能有:推拿、揉捏、捶打及指压。其中推拿、揉捏、捶打及指压功能分别由三台电机独立驱动实现。按摩头功能盒可以上下运行,并可选择全程、局部以及定点进行按摩。而在臀部和下肢区域,可以通过控制气囊的收放起伏律动以及气囊的强度来实现按摩。
此外还可以根据个人的喜好控制靠背、小腿架的电动推杆,调整靠背和小腿架的倾斜角度,从而提高按摩舒适度。
2.3:系统功能实现
2.3.1:硬件实现
该按摩椅控制系统中的主要硬件为PIC16F74微处理器。供电电源为+5V,输入和输出可以是模拟(量)信号,也可以是开关(量)信号。本控制系统采用的是PIC16F74开关量的输入和输出来进行控制的。
系统首先通过红外线探测装置获得按摩对象的身高和形体参数,并将相关参数传递给系统主程序,然后根据人体穴位的分布原理,驱动按摩机构进行按摩。
系统中的背部行程及揉捏电机在运行时经常需要换向,其正反转功能采用互锁电路驱动两个继电器交替工作来实现,并且电路在任何时候最多只有一只继电器工作,这样可以十分有效的避免同一继电器在较长时间使用后,由于其换向后接触不良而导致的电路短路情况,从而可以大大提高系统运行的稳定性和可靠性,显著地延长产品的使用寿命。
2.3.2:系统软件实现
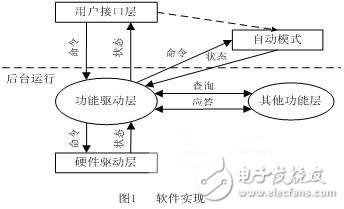
为了充分发挥系统的性能,实现按摩方式、力度及其宽窄的合理组合,本系统软件共设计为三层:电机驱动层,功能驱动层,用户界面。其中:电机驱动层负责对硬件的驱动,即起停、强弱以及宽窄的驱动;功能驱动层负责对所有功能的按优先级仲裁,对低级功能进行保护或清除,并与其他模块的功能层交互等;而用户界面则负责接收用户的按键输入。其原理如图1所示。
系统的控制程序流程图如图2所示
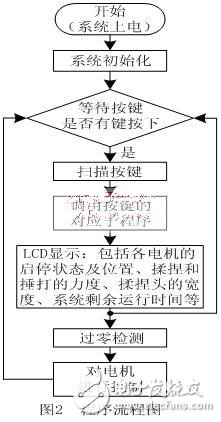
系统上电后,CPU开始对整个键盘进行扫描,当扫描到某键按下后进行适当的延时消抖,再次确认按键有效后即启动相应按键的服务子程序,然后进行过零检测,通过控制可控硅来实现对电机的速度控制。同时将电机的速度状态显示于LCD中。
本系统软件主要解决了以下几个重要的问题:
2.3.2.1:过零检测
系统利用特定的硬件电路对市电进行整流后得到半波信号,然后从RA4引脚输入同步信号。系统巧妙的利用了硬件的特性,当对T0进行初始值设定后,然后通过外部信号来触发定时器T0的翻转,从而实现精确的过零检测。然后根据过零检测可以控制可控硅来实现对电机电压的准确控制。这样可以十分有效地避免通过软件进行过零检测时带来的误差,并由此引起的电机电压控制不准确、不稳定以及整个系统运行的不可靠。
2.3.2.2:按摩区间划分
当红外线探测装置探测到按摩对象的相应参数后,程序根据此结果将整个按摩区域划分为颈部、中部、腰部以及尾椎四个区间。并按人体生理原理对各个区间采用不同的按摩方式及其按摩力度和宽窄的变化组合,从而提高按摩舒适度。
2.3.2.3:脉冲计数
程序采用CCP模块(即捕获、比较、脉冲宽度调制模块)中的捕获功能来实现脉冲计数。从而实现按摩头功能盒在区间内的运动控制。但在实验过程中发现计数值偶尔会存在误差。通过采取以下改进措施后:即当CCP捕捉到第一个脉冲后便立即关闭CCP,同时启动定时器并延时一定的时间后再重新启动CCP继续进行脉冲计数。经过较长时间的实验测定以及用户反馈的情况,确定采用CCP实现的脉冲计数已经十分准确,完全达到了系统的控制精度要求。
2.3.2.4:行程控制
行程电机具有硬件保护电路,在行程的首尾安装有限位开关,当功能盒碰到限位开关后,由行程开关切断行程电机的供电,并且引起引脚RB5和RB4的电平变化。因此程序可以通过检测引脚RB5和RB4的电平变化来控制电机的换向。但由于行程开关在使用较长时间后可能会出现功能失效的情况,这时即使功能盒触碰上下行程开关,也不会引起引脚RB5或RB4的电平变化,当出现这种情况时,程序由于没有检测到换向信号而控制电机继续向同一方向运行,直到顶死在丝杆的极限位置。
为了避免产品在使用中出现这种情况,在控制行程电机换向的程序中,增加了按行程计数值来控制电机换向的功能:选定下行程极限位作为计数基点,行程电机启动后便开始进行脉冲计数,并在上下行方向分别采用增减计数值的方法,当行程计数值达到设定的极限值时便进行换向,而当功能盒每次重新到达计数基点时再对计数值进行清零。
通过采用根据行程计数值来控制电机换向后,根据实验结果以及用户反馈的情况来看,采取以上措施后,可以显著的提高系统运行的稳定性和可靠性,从而提高了产品质量,延长了产品的使用寿命。
3:系统抗干扰措施
为了保证系统的正常工作,在设计时采用了以下一些抗干扰措施:在硬件方面,由于系统对电源要求较高,因此在设计电源时采用了多级稳压性能较好的7805模块;又由于本系统中单片机的输入信号是开关量,因此在每一极输入电路的输入端增加了一极阻容滤波以防止干扰;而且系统采用了复位功能以防止程序进入死循环。此外在软件方面也采取了一些抗干扰措施,比如在电机换向时采用了一定的延时以保护电机,当CCP捕捉到有效脉冲信号后,关闭CCP并延时一定的时间后再重新启动CCP,以减少捕捉误脉冲等等。
4:结 论
系统采用 PIC16F74单片机作为微处理芯片,实现对电动按摩椅的控制。通过在硬件电路中增加必要的互锁电路,提高了系统运行的稳定性和可靠性,并利用系统硬件特性实现了准确的过零检测,从而为电机电压的准确控制和稳定调整提供了良好的前提条件;在软件中,增加了按行程计数值进行换向控制,以及采用中断方式实现对电机的控制等。通过采用以上一些措施后,不但降低了控制部分的制造成本,而且缩短了产品的开发周期,保证了系统运行的稳定性、可靠性以及经济实用性。
-
 sunliezhi
2014-10-07
0 回复 举报学习了 收起回复
sunliezhi
2014-10-07
0 回复 举报学习了 收起回复
-
求助:一个关于PIC16F74的问题2013-11-04 2364
-
PC机做为上位机,通过labview编程控制单片机PIC16F742016-09-15 4302
-
共享按摩椅方案开发2017-11-07 9422
-
SX1278(LORA)应用于共享按摩椅2018-10-08 2442
-
霍尔传感器在智能按摩椅中的应用2020-04-03 3000
-
霍尔传感器技术在智能按摩椅中的应用-响拇指2021-11-03 1257
-
基于RTX51的按摩椅电机动作系统设计2009-06-15 1285
-
基于PIC16F74控制的高频化真在线式UPS2009-07-14 1669
-
压力传感器在按摩椅中的应用2018-06-14 8599
-
基于lora模块的共享按摩椅原理2018-12-06 823
-
电动按摩椅的使用好处及常见电路故障分析2019-09-17 10714
-
按摩椅的作用有哪些2020-04-13 1989
-
荣泰S60按摩椅已正式上线,将带来颠覆性的按摩体验2020-10-18 4059
-
按摩椅控制板研发,沐渥打造智能简约化按摩椅2022-08-10 2034
-
基于STM32单片机的按摩椅系统设计2023-07-25 3476
全部0条评论

快来发表一下你的评论吧 !
