

由浅入深,蓝牙4.0/BLE协议栈开发攻略大全(2)
网络/协议
描述
本系列教程将结合TI推出的CC254x SoC 系列,讲解从环境的搭建到蓝牙4.0协议栈的开发来深入学习蓝牙4.0的开发过程。教程共分为六部分,本文为第二部分:
第二部分知识点:
第六节 独立按键之查询方式
第七节 独立按键之中断方式
第八节 CC254x内部温度传感器温度采集
第九节 五向按键
第十节 蜂鸣器
有关TI 的CC254x芯片介绍,可点击下面链接查看:
同系列资料推荐:
有关本文的工具下载,大家可以到以下这个地址:
朱兆祺ForARM第六节 独立按键之查询方式
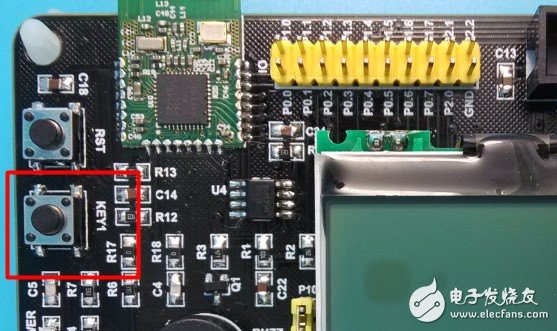
在MT254xboard上有一个独立按键KEY1,如图 ,独立按键和复位键在整个班子的左上角。按键通过P0.0口和CPU连接,在没有按键时为高电平,按下后为低电平。下面我们通过LCD来显示独立按键的状态。
其对应的原理图如下:
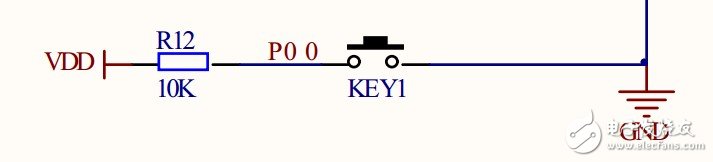
我们先用查询的方式读取按键的状态。因为按键接入在P0.0口,所以我们读取P0.0口的电平即可知道按键的状态。
uint8 KeyValue(void) // 读取按键状态
{
if((P0&0X01) == 0X00 ) // 按下为低电平
{
return KEY_DOWN;
}
else
{
return KEY_UP;
}
}
这里我们在while循环中不断的读取按键状态,并且判断是否改变,如果改变则改变LCD的显示。
int main(void)
{
uint8 OldKeyValue = 0;
uint8 NewKeyValue = 0;
SysStartXOSC();
LCD12864_Init();
LCD12864_DisStr(1, “ Key Test”);
// 按键初始化
P0SEL &= ~0X01; // 设置为 IO功能
P0DIR &= ~0X01; // 设置为输入功能
while(1)
{
NewKeyValue = KeyValue(); // 读取按键状态
if(OldKeyValue != NewKeyValue) // 按键状态改变
{
OldKeyValue = NewKeyValue; // 保存当前按键状态
if(OldKeyValue == KEY_DOWN)
{
LCD12864_DisStr(3, “ Key Down ”);
}
else
{
LCD12864_DisStr(3, “ Key Up ”);
}
}
}
return 0;
}
运行程序,效果如图所示:

第七节 独立按键之中断方式
复制Key工程,重命名为KeyInterrupt。刚刚我们用查询的方式读取按键的状态。但是这种方式在实际的工程中没有实际的应用价值,下面我们采用外部中断的方式来读取按键的状态,每当按键按下时就会触发一次外部中断。为了P0.0口能够触发中断,我们需要进行如下配置:
P0IEN |= 0X01; // P00 设置为中断方式
PICTL &=~ 0X01; // 下降沿触发
IEN1 |= 0X20; // 允许P0口中断
P0IFG = 0x00; // 清除中断标志位
EA = 1; // 开总中断
然后就需要编写中断服务函数了。这里注意一点,在IAR中的中断函数有点特殊,格式为:
#pragma vector = 中断向量
__interrupt 函数
所以我们的中断函数为:
#pragma vector = P0INT_VECTOR
__interrupt void P0_ISR(void)
{
if(0x01&P0IFG)
{
NewKeyValue = KEY_DOWN; // 记录按键按下
}
P0IFG = 0; //清中断标志
P0IF = 0; //清中断标志
}
在中断中我们记录按键按下,等待应用程序处理。而在主函数中我们需要处理按键按下事件,主函数中我们对按键计数并且通过LCD显示。
int main(void)
{
char LCDBuf[21]={0}; // 显存
int KeyCnt = 0;
SysStartXOSC();
LCD12864_Init();
LCD12864_DisStr(1, “ Key Test”);
P0SEL &= ~0X01; // 设置为IO功能
P0DIR &= ~0X01; // 设置为输入功能
P0IEN |= 0X01; // P0.0 设置为中断方式
PICTL |= 0X01; // 下降沿触发
IEN1 |= 0X20; // 允许P0口中断
P0IFG = 0x00; // 清除中断标志位
EA = 1; // 开总中断
sprintf(LCDBuf, “ Key Count : %d”, KeyCnt++); // 按键计数
LCD12864_DisStr(3, LCDBuf);
while(1)
{
if(KEY_DOWN == NewKeyValue) // 按键按下
{
SoftWaitUs(25000); // 延时防抖
if((P0&0X01) == 0X00) // 再次确认按键是否按下
{
sprintf(LCDBuf, “ Key Count : %d”, KeyCnt++); // 按键计数
LCD12864_DisStr(3, LCDBuf);
}
else
{
NewKeyValue = KEY_UP; // 按键松开
}
}
}
return 0;
}
每按一次按键计数加1,效果如图所示:

第八节 CC254x内部温度传感器温度采集
CC254x内部有一个温度传感器,我们这节使用这个传感器来采集芯片的温度,此传感器精度不高。不适合用于实际的工程中,这里只为演示AD采样。要使用内部的温度采集我们需要使用AD采样,所以我们需要先来了解CC254x的AD功能。在后续课程有对ADC的详细说明。
ADC结构图如下所示:

ADC控制寄存器1如下图所示:

我们使用手动触发的方式进行AD采样,所以STSEL = 11B,最低两位始终为1,最终ADCCON1=0x33。
ADC控制寄存器3如图所示:

ADC参考电压使用内部电压,采用12位精度采集。采集温度通道。所以ADCCON3= 0x3E。这里注意一点,ADCCON2和ADCCON3的配置是一样的,我们这里用ADCCON3来配置。
uint16 ADC_Read (uint8 channel)
{
int16 reading = 0;
uint8 adcChannel = 0x01《《channel;
int16 Result = 0;
if (channel 《= 7) // 通道0-7需要通过P0.0-P0.7输入
{
ADCCFG |= adcChannel;
}
uint8 i=0;
do{
ADCCON3 = channel | 0x20; // 12位精度,启动转换
while (!(ADCCON1 & 0x80)); // 等待转换完成
// 读取采样结果
reading = (int16)(ADCL);
reading |= (int16)(ADCH 《《 8);
reading 》》= 4; // 丢弃低位
Result += reading; // 累加
}while(i++ 《 10); // 连续采样10次
if (channel 《= 7)
{
ADCCFG &= (adcChannel ^ 0xFF);
}
return (Result/10);
}
在读取温度值前,我们还需要使能温度传感器。
int main(void)
{
float temp=0;
char LCDBuf[21] = {0};
SysStartXOSC(); // 启动外部晶振
LCD12864_Init(); // LCD初始化
// 打开温度传感器
TR0 = 0x01;
ATEST = 0x01;
while(1)
{
temp = (ADC_Read(TEMP_ADC_CHANNEL) - 1340) /10.0;
sprintf(LCDBuf, “ temp : %0.1f”, temp); //
LCD12864_DisStr(3, LCDBuf);
SoftWaitUs(100000);
}
return 0;
}
采集的温度显示在LCD上,可以看到温度在跳动,这是由于AD的误差太大导致的,这里只做一个简单的实验,如果需要工程应用,建议外接温度传感器。把手放在芯片上可以看到温度在上升。温度采集结果如下图所示:

第九节 五向按键
五向按键,也就是我们平常所见的摇杆内部构造,五向按键有上下左右和中间五个按键值,MT254xboard上的五向按键检测电路由馒头科技自主设计,而不是Ti的设计,采用一个外部中断和一个AD检测口来完成按键的检测。

由原理图可知当我们按下不同的键值时在JOY_CHK将会产生一个上升沿,并且在JOY_AD口有不同的电压。我们只需要在JOY_CHK的外部中断中读取JOY_AD的电压即可识别不同的按键。
外部中断和AD采用在前面已经讲过了,这里只需要拿来用就可以了。JOY_CHK连接在P0.7脚,JOY_AD连接在P0.6脚。我们将按键值显示在LCD上。
int main(void)
{
uint8 KeyValue = 0;
SysStartXOSC();
LCD12864_Init();
LCD12864_DisStr(1, “ JoyStick Test”);
P0INP |= 0X40; // P0.6 三态
P0SEL &= ~0X80; // 设置为IO功能
P0DIR &= ~0X80; // 设置为输入功能
P0IEN |= 0X80; // P0.7 设置为中断方式
PICTL &= ~0X80; // 上升沿触发
IEN1 |= 0X20; // 允许P0口中断
P0IFG = 0x00; // 清除中断标志位
EA = 1; // 开总中断
while(1)
{
if(KeyStat) // 按键按下
{
KeyValue = GetKeyValue();
switch ( KeyValue )
{
case KEY_UP :
sprintf(LCDBuf, “ UP”);
break;
case KEY_DOWN :
sprintf(LCDBuf, “ Down”);
break;
case KEY_LEFT :
sprintf(LCDBuf, “ Left”);
break;
case KEY_CENTER :
sprintf(LCDBuf, “ Center”);
break;
case KEY_RIGHT :
sprintf(LCDBuf, “ Right”);
break;
default:
break;
}
KeyStat =0;
LCD12864_DisStr(3, LCDBuf);
}
}
return 0;
}
按键的检测通过电压来区分。
uint8 GetKeyValue(void)
{
uint16 adc;
uint8 ksave0 = 0;
adc = ADC_Read (JOY_AD_CHANNEL);
if ((adc 》= 800) && (adc 《= 1100))
{
ksave0 = KEY_RIGHT;
}
else if ((adc 》= 1200) && (adc 《= 2000))
{
ksave0 = KEY_CENTER;
}
else if ((adc 》= 2050) && (adc 《= 2150))
{
ksave0 = KEY_UP;
}
else if ((adc 》= 2200) && (adc 《= 2230))
{
ksave0 = KEY_LEFT;
}
else if ((adc 》= 2240) && (adc 《= 2500))
{
ksave0 = KEY_DOWN;
}
return ksave0;
}
使用五向按键效果如下所示:

第十节 蜂鸣器
蜂鸣器是一种常用的报警设备,常用的蜂鸣器有无源和有源两种类型,无源蜂鸣器需要用一定频率的方波驱动,从而发出不同频率的声音。而有源蜂鸣器只需要通电就会发出固定频率的声音,MT254xboard开发板上的蜂鸣器用的是无源蜂鸣器,因此我们需要用一定频率的方波来驱动。

硬件驱动方面,我们这里使用了PNP三极管来驱动蜂鸣器,BUZZ引脚为芯片的P2.0。对照IO复用表可知,此IO可以作为定时器4的匹配通道1输出。所以我们需要把定时器配置为PWM匹配输出模式:
PERCFG |= (0x01《《4); // 选择定时器4匹配功能中的第2种IO口
P2DIR |= 0x01; // p2.0 输出
P2SEL |= 0x01; // p2.0 复用功能
T4CTL &= ~0x10; // Stop timer 3 (if it was running)
T4CTL |= 0x04; // Clear timer 3
T4CTL &= ~0x08; // Disable Timer 3 overflow interrupts
T4CTL |= 0x03; // Timer 3 mode = 3 - Up/Down
T4CCTL0 &= ~0x40; // Disable channel 0 interrupts
T4CCTL0 |= 0x04; // Ch0 mode = compare
T4CCTL0 |= 0x10; // Ch0 output compare mode = toggle on compare
这里仅仅是配置为匹配输出,具体输出什么样的波形还需要我们再通过计算得出。
void Buzzer_Start(uint16 frequency)
{
P2SEL |= 0x01; // p2.0 复用功能
uint8 prescaler = 0;
// Get current Timer tick divisor setting
uint8 tickSpdDiv = (CLKCONSTA & 0x38)》》3;
// Check if frequency too low
if (frequency 《 (244 》》 tickSpdDiv)){ // 244 Hz = 32MHz / 256 (8bit counter) / 4 (up/down counter and toggle on compare) / 128 (max timer prescaler)
Buzzer_Stop(); // A lower tick speed will lower this number accordingly.
}
// Calculate nr of ticks required to achieve target frequency
uint32 ticks = (8000000/frequency) 》》 tickSpdDiv; // 8000000 = 32M / 4;
// Fit this into an 8bit counter using the timer prescaler
while ((ticks & 0xFFFFFF00) != 0)
{
ticks 》》= 1;
prescaler += 32;
}
// Update registers
T4CTL &= ~0xE0;
T4CTL |= prescaler;
T4CC0 = (uint8)ticks;
// Start timer
T4CTL |= 0x10;
}
这个函数是通过传入参数的形式,使P2.0口发出指定频率的方波。
void Buzzer_Stop(void)
{
T4CTL &= ~0x10; // Stop timer 3
P2SEL &= ~0x01;
P2_0 = 1;
}
这个函数是使蜂鸣器停止,主要有三个动作,停止定时器,将P2.0配置为IO功能并且输出高电平,因为我们使用的是PNP三极管。
我们在按键的程序上加上蜂鸣器的控制,当按下按键时,蜂鸣器响。松开后停止响。
int main(void)
{
char LCDBuf[21]={0}; // 显存
int KeyCnt = 0;
SysStartXOSC();
LCD12864_Init();
LCD12864_DisStr(1, “ Buzzer Test”);
Buzzer_Init();
P0SEL &= ~0X01; // 设置为IO功能
P0DIR &= ~0X01; // 设置为输入功能
P0IEN |= 0X01; // P0.0 设置为中断方式
PICTL |= 0X01; // 下降沿触发
IEN1 |= 0X20; // 允许P0口中断
P0IFG = 0x00; // 清除中断标志位
EA = 1; // 开总中断
sprintf(LCDBuf, “ Key Count : %d”, KeyCnt++); // 按键计数
LCD12864_DisStr(3, LCDBuf);
while(1)
{
if(KEY_DOWN == NewKeyValue) // 按键按下
{
SoftWaitUs(25000); // 延时防抖
if((P0&0X01) == 0X00) // 再次确认按键是否按下
{
sprintf(LCDBuf, “ Key Count : %d”, KeyCnt++); // 按键计数
LCD12864_DisStr(3, “ Buzzer Start”);
Buzzer_Start(2000);
}
else
{
NewKeyValue = KEY_UP; // 按键松开
Buzzer_Stop();
LCD12864_DisStr(3, “ Buzzer Stop”);
}
}
}
return 0;
}
按下按键后可以看到LCD显示Buzzer Start,听到蜂鸣器响,如果你有示波器,还能测到P2.0口有一个2KHz的方波。
-
 北冥系列
2014-08-29
20 回复 举报虽然看的有点晕 但是还是很感兴趣 收起回复
北冥系列
2014-08-29
20 回复 举报虽然看的有点晕 但是还是很感兴趣 收起回复
-
STM32WB BLE协议栈编程指南2023-08-14 934
-
BLE5.0蓝牙协议栈LE 2M PHY功能介绍2021-10-18 1583
-
蓝牙协议栈BLE-CC254x资源下载2021-04-24 1518
-
分享几款基于TI的BLE蓝牙模块技术资料2021-03-09 8115
-
CC2541开发环境BLE-CC254x1.3蓝牙协议栈的应用程序免费下载2020-10-27 1807
-
蓝牙协议4.0、4.1、4.2的比较2018-10-11 3046
-
AliOS Things蓝牙协议栈及应用开发框架介绍2018-01-11 3036
-
Cypress PSoC蓝牙低功耗开发设计攻略2015-05-08 4482
-
由浅入深,蓝牙4.0/BLE协议栈开发攻略大全(6)2014-09-04 26871
-
由浅入深,蓝牙4.0/BLE协议栈开发攻略大全(5)2014-09-01 37431
-
由浅入深,蓝牙4.0/BLE协议栈开发攻略大全(4)2014-08-25 22564
-
由浅入深,蓝牙4.0/BLE协议栈开发攻略大全(3)2014-08-22 43228
-
由浅入深,蓝牙4.0/BLE协议栈开发攻略大全(1)2014-08-13 142984
-
蓝牙4.0(CC2540/CC2541)BLE协议栈开发(连载)2014-05-07 170047
全部0条评论

快来发表一下你的评论吧 !
