

爱普生IMU产品在激光雷达测绘中的应用
描述
随着雷达应用的快速发展,激光雷达测绘技术也迅速发展,它集成了激光测距系统、全球定位系统(GPS)和惯性导航系统三种技术于一体。其中激光雷达通过发射扫描激光,并检测激光反射,从而测量反射物到激光雷达的距离。在知道自身三维空间坐标系和激光扫描方向的情况下,能够实时获取测量系统周围的高分辨率的三维空间信息。
该技术搭载于无人机上,被广泛应用于电力巡线、地形勘探、矿山测量等领域。
为什么需要惯性测量单元(IMU)
首先,惯性导航系统中一般具有惯性测量单元(IMU),可以用来精确测量出激光雷达自身的姿态数据,从而计算出激光雷达的扫描方向。
其次,在测量过程当中,通常由卫星系统(BDS/GPS/GLONASS/GALILEO)+惯导系统来实现测量激光雷达自身的空间坐标。但是,卫星系统在某些地方没有信号(如隧道),且卫星系统位置信号相对来说是慢速信号,解算位置信息需要更快速的坐标信息更新,因此需要惯性测量单元(IMU)每秒来提供更多位置信息。

惯性测量单元(IMU)对精度的影响
激光雷达测绘设备的指标包含了:系统参数指标,激光雷达单元指标、惯导系统指标等单元。惯性测量单元(IMU)精度决定了姿态和位置精度,因此直接影响系统精度。采用爱普生的M-G370,经过后处理,激光测绘雷达的惯导系统精度可以达到:
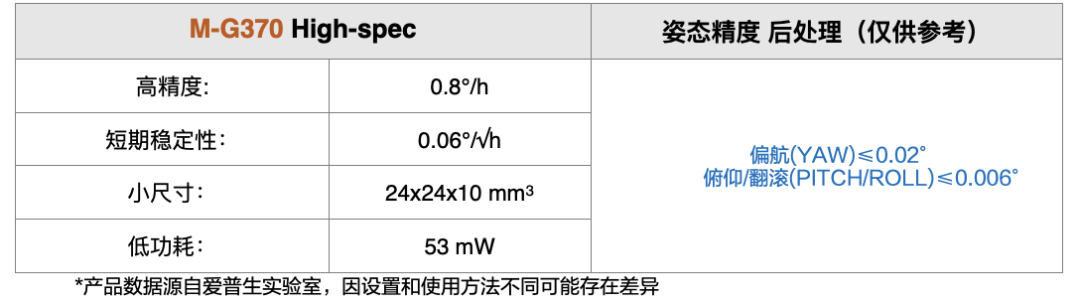
除了高精度,爱普生的惯性测量单元(IMU)还具有体积小、重量轻、功耗低的特点,有助于客户应用的小型化和轻型化的要求;并且产品设计能硬件和软件兼容,性能更稳定,也便于客户维护升级。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达在地形测绘中的作用2024-10-27 2966
-
测绘用激光雷达芯片有哪些2023-12-13 2161
-
3D Flash 激光雷达测绘和手势识别2023-01-05 2575
-
激光雷达是什么,激光雷达的应用说明2022-06-20 26757
-
激光雷达2021-01-17 20220
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5787
-
TOF激光雷达2019-06-07 9316
-
激光雷达除了可以激光测距外,还可以怎么应用?2018-05-11 6124
-
北醒固态设计激光雷达2018-01-25 5892
-
消费级激光雷达的起航2017-12-07 7512
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6932
-
常见激光雷达种类2017-09-25 14027
-
激光雷达分类以及应用2017-09-19 8923
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5358
全部0条评论

快来发表一下你的评论吧 !
