

可穿戴型下肢助力机器人感知系统传感电路设计
描述
电路说明: 电路由检测电路、信号放大电路和稳压电源电路组成。其中检测电路由电阻RH、晶体管VT以及电阻R1、R2组成;信号放大电路由A1、RP1、RP2、 R3、R4、R6、R5、R8、VD3组成;稳压电源电路由VD1、VD2、R7、R9、R10、R11组成,为检测电路提供2.5V的稳压电源。而电阻 RH可以采用硅电阻,因为硅在25摄氏度时响应时间小于5S。 其中电路中采用了两个TL431,TL431是一个有良好的热稳定性能的三端可调分流基准源。它的输出电压用两个电阻就可以任意地设置到从2.5V到 36V范围内的任何值。该器件的典型动态阻抗为0.2Ω,在很多应用中可以用它代替齐纳二极管,例如,数字电压表,运放电路、可调压电源,开关电源等等。
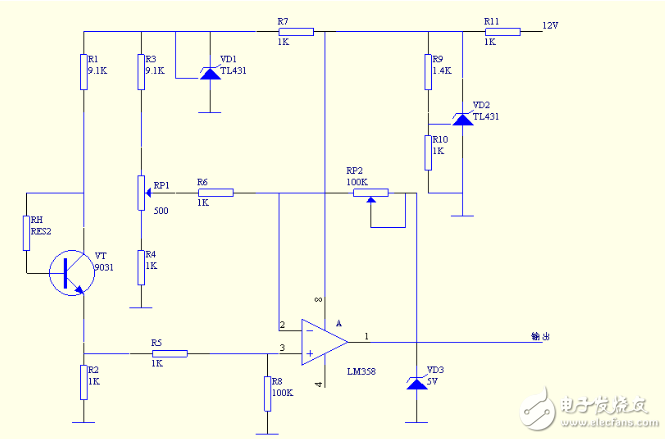
电路原理: 当传感器穿戴身上时,由于温度不同,使得传感器的RH阻值也不同,这个电阻成为VT的基极偏流电阻。偏流电阻的不同,使基级的电流也不同,从而改变了VT 的集电极电流,也就改变了VT发射极电流,发射极的电流流经 R2,在R2上将发射极电流转换成电压,并将该电压送到A1的同相输入端,经A1放大后输出,并由VD3控制输出电压,使得输出电压在5V以内。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于运动学原理的可穿戴下肢助力机器人2014-02-18 20992
-
可穿戴型下肢助力机器人感知系统研究2014-07-25 10884
-
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块2025-01-04 2306
-
机器人竞技幕后:磁传感器芯片激活 “精准感知力”2025-08-26 891
-
人形机器人关节扭矩传感器的详细应用场景及解决方案2026-05-20 98
-
可穿戴设备中的传感器设计2014-12-13 9233
-
可穿戴传感电路设计精华2015-01-04 4317
-
浅析外骨骼机器人技术2019-04-28 2528
-
基于ARM9的DF-1机器人传感器系统设计2019-06-21 2463
-
关于可穿戴型下肢助力机器人感知系统研究2020-04-27 2806
-
我国自主研发的外骨骼机器人:人体运动意图控制机器人系统2018-01-19 3904
-
对可穿戴型下肢助力机器人的分析与研究2018-10-07 10171
-
LG电子公开可支持人体下肢肌肉力量的可穿戴机器人,助力布局机器人领域2018-09-12 1252
-
LG对准机器人领域将公开可穿戴机器人2018-11-13 806
-
下肢外骨骼康复训练机器人2023-08-30 1738
全部0条评论

快来发表一下你的评论吧 !
