

基于无线通信的嵌入式机器人控制系统电路设计
嵌入式类电子电路图
描述
轮式移动机器人是机器人研究领域的一项重要内容,它集机械、电子、检测技术与智能控制于一体,是一个典型的智能控制系统。智能机器人比赛集高科技、娱乐、竞技于一体,已成为国际上广泛开展的高技术对抗活动。
无线通信接口设计
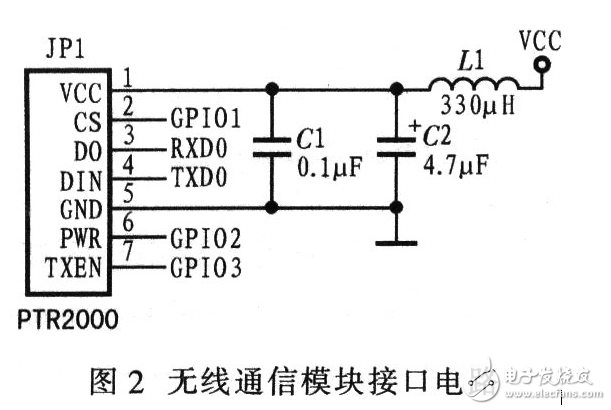
系统采用迅通公司生产的PTR2000无线通信数据收发模块。电路接口如图2所示。该模块基于NORDIC公司生产的射频器件nRF401开发,其特点是:①有两个频道可供选择,工作速率高达20 Kb/s;②接收发射合一,适合双工和单工通信,因而通信方式比较灵活;③体积小,所需外围元件少,接口电路简单,因此特别适合机器人小型化要求;④可直接接单片机串口模块,控制简单;⑤抗干扰能力强;⑥功耗小,通信稳定。
超声波测距传感器设计与实现
两路超声波传感器用以控制机器人避开障碍物,并预测机器人相对目的地距离,起导航作用,其接收部分与微控制器的捕获和定时管脚相连接。整个超声波检测系统由超声波发射、超声波接收和单片机控制等部分组成。发射部分由高频振荡器、功率放大器及超声波换能器组成。经功率放大器放大后,通过超声波换能器发射超声波。
图5给出由数字集成电路构成的超声波振荡电路,振荡器产生的高频电压信号通过电容C2隔除掉了信号中的直流量并给超声波换能器MA40S2S。其工作过程:U1A和UlB产生与超声波频率相对应的高频电压信号,该信号通过反向器U1C变为标准方波信号,再经功率放大,C2隔除直流信号后加在超声波换能器MA40S2S进行超声波发射。如果超声波换能器长时间加直流电压,会使其特性明显变差,因此一般对交流电压进行隔除直流处理。U2A为 74ALS00与非门,control_port(控制端口)引脚为控制口,当control_port为高电平时,超声波换能器发射超声波信号。
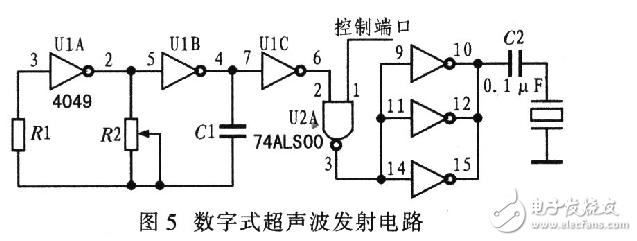
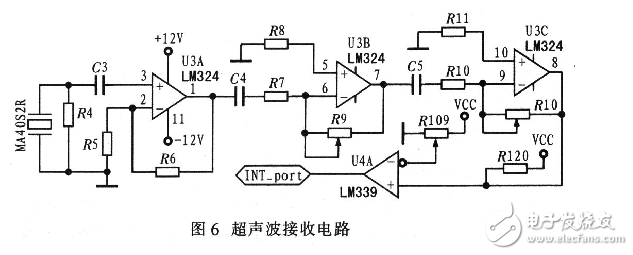
图6示出为超声波接收电路。超声波接收换能器采用MA40S2R,对换能器接收到的信号采用集成运算放大器LM324进行信号放大,经过三级放大后,通过电压比较器LM339将正弦信号转换为TTL脉冲信号。INT_Port与单片机中断管脚相连,当接收到中断信号后,单片机立即进入中断并对超声波信号进行处理和判断。
根据竞技机器人的功能要求进行总体设计,将各个功能进行模块化,其控制系统硬件框图如图所示。中央处理器采用微控制器结构,用以控制外围设备协调运行。舵机控制机器人的运动方向;驱动电机电动机采用输出轴配有光电编码器的小型直流电机驱动车轮旋转。电磁铁作为机械手夹紧的执行元件。设置了两路超声波传感器、8路光电检测输入和8路开关量检测接口。
-
 yangg11g
2014-12-25
0 回复 举报mark 收起回复
yangg11g
2014-12-25
0 回复 举报mark 收起回复
-
浅谈嵌入式技术在机器人控制系统的作用2018-05-10 8654
-
基于PTR4000的足球机器人无线通信子系统的设计2011-03-05 2393
-
嵌入式系统在机器人中的应用2018-07-06 3768
-
如何利用ARM研究嵌入式服务机器人控制器?2019-07-30 3246
-
嵌入式服务机器人控制系统能实现什么功能?2019-10-15 2609
-
RIO嵌入式控制平台怎么助力机器人应用?2019-11-06 3077
-
无线通信模块在嵌入式机器人中有什么应用?2020-03-05 2252
-
基于RTX51的排爆机器人嵌入式控制器软硬件开发怎么样?2021-06-07 1663
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 2596
-
基于无线通信的嵌入式机器人控制系统设计2010-12-17 417
-
嵌入式服务机器人控制器的设计2010-12-28 665
-
用于机器人的RIO嵌入式控制平台2010-03-11 1280
-
基于ARM的嵌入式移动机器人控制系统的设计2015-12-23 941
-
基于机器人嵌入式控制系统设计2017-10-16 849
-
嵌入式系统无线通信技术研究2017-11-24 1463
全部0条评论

快来发表一下你的评论吧 !
