

汽车电子设备技术详解及汽车控制方案汇总
汽车电子控制
描述
汽车电子是车体汽车电子控制装置和车载汽车电子控制装置的总称。车体汽车电子控制装置,包括发动机控制系统、底盘控制系统和车身电子控制系统(车身电子ECU)。汽车电子最重要的作用是提高汽车的安全性、舒适性、经济性和娱乐性。用传感器、微处理器MPU、执行器、数十甚至上百个电子元器件及其零部件组成的电控系统。
ABS防抱死系统
ABS即防抱死制动系统,是Anti—lock—Braking System的缩写。司机们在驾车时都有体会,在湿滑路面、沙石路面或者高速过弯时,刹车绝对不能一脚踩死,而应分步刹车,一踩一松,否则,车轮容易发生抱死不转动的情况,前轮抱死会引起汽车失去转弯能力,后轮抱死容易发生甩尾事故等等。安装ABS就是为解决刹车时车轮抱死这个问题,其工作原理也像上面所说的一踩一松,不过,ABS的工作频率要比人的操控快得多。装有ABS的汽车,能有效控制车轮保持在转动状态而不会抱死不转,从而大大提高了刹车时汽车的稳定性及较差路面条件下的汽车制动性能。ABS是通过安装在各车轮或传动轴上的转速传感器等不断检测各车轮的转速,由计算机计算出当时的车轮滑移率(由滑移率来了解汽车车轮是否已抱死),并与理想的滑移率相比较,做出增大或减小制动器制动压力的决定,命令执行机构及时调整制动压力,以保持车轮处于理想的制动状态。因此,ABS装置能够使车轮始终维持在有微弱滑移的滚动状态下制动,而不会抱死,达到提高制动效能的目的。
EBD电子制动力分配
EBD即电子制动力分配系统,EBD能够根据由于汽车制动时产生轴荷转移的不同,而自动调节前、后轴的制动力分配比例,提高制动效能,并配合ABS提高制动稳定性。汽车在制动时,四只轮胎附着的地面条件往往不一样。比如,有时左前轮和右后轮附着在干燥的水泥地面上,而右前轮和左后轮却附着在水中或泥水中,这种情况会导致在汽车制动时四只轮子与地面的摩擦力不一样,制动时容易造成打滑、倾斜和车辆侧翻事故。EBD用高速计算机在汽车制动的瞬间,分别对四只轮胎附着的不同地面进行感应、计算,得出不同的摩擦力数值,使四只轮胎的制动装置根据不同的情况用不同的方式和力量制动,并在运动中不断高速调整,从而保证车辆的平稳、安全。
TCS牵引力控制
TCS即牵引力控制系统,又称循迹控制系统。汽车在光滑路面制动时,车轮会打滑,甚至使方向失控。同样,汽车在起步或急加速时,驱动轮也有可能打滑,在冰雪等光滑路面上还会使方向失控而出危险。TCS就是针对此问题而设计的。TCS依靠电子传感器探测到从动轮速度低于驱动轮时(这是打滑的特征),就会发出一个信号,调节点火时间、减小气门开度、减小油门、降挡或制动车轮,从而使车轮不再打滑。TCS可以提高汽车行驶稳定性,提高加速性,提高爬坡能力。原来只是豪华轿车上才安装TCS,现在许多普通轿车上也有。TCS如果和ABS相互配合使用,将进一步增强汽车的安全性能。TCS和ABS可共用车轴上的轮速传感器,并与行车电脑连接,不断监视各轮转速,当在低速发现打滑时,TCS会立刻“通知”ABS动作来减低此车轮的打滑。若在高速发现打滑时,TCS立即向行车电脑发出指令,指挥发动机降速或变速器降挡,使打滑车轮不再打滑,防止车辆失控甩尾。
ESP电子稳定程序
ESP即电子稳定装置,是Electronic Stablity Program的简称。ESP是由奔驰汽车公司首先应用在它的A级车上的,实际上也是一种牵引力控制系统。但是,与其他牵引力控制系统比较,ESP不但控制驱动轮,而且可控制从动轮。如后轮驱动汽车出现转向过度时,ESP便会慢刹外侧的前轮来稳定车子,防止后轮失控而发生甩尾现象;在转向过小时,为了校正循迹方向,ESP则会刹慢内后轮,从而校正行驶方向。
GPS全球定位系统
GPS是GloblePositioningSystem的缩写,意思为全球定位系统,它是由美国政府历经20多年,耗资120亿美金而实施的一项庞大的宇宙及航天工程。该系统可以在全球范围内全天候地为地面目标提供信息,从而确定该目标在地面上的精确位置、速度、运行方面等参数。
最新汽车智驾电子技术
丰田“司机意识探索”
在洛杉矶车展上,丰田公司展示了一辆“司机意识探索”概念车,这款车由丰田与微软研究院共同开发,后者利用微软公司的Kinect 体感技术,将车与人之间的交互设计充分融入到汽车显示系统中,将手势控制、语音控制、遥控钥匙相结合,司机能够在驾车之前就获得交通、天气、预约等信息, 甚至会将路段中经过的加油站位置标记出来,通过遥控器能够在车窗显示屏上对出行途中的多项计划任务进行规划。丰田表示,将这些日常任务在司机进入汽车之前 就全部规划完毕,那么司机就能更专注于驾车的过程。
斯巴鲁新一代安全系统
斯巴鲁 新一代EyeSight系统新增了方向盘自动控制功能和防止车辆偏离车道功能。在启动跟踪前方车辆的功能后,当车速超过65 千米/时时就自动控制方向盘,使车辆行驶于车道中央附近。不过,当推断驾驶员未操作方向盘时则不启动该功能。车辆偏离预警的功能是当车辆以超过65千米 /时的速度行驶在汽车专用道路时,如果出现跑出车道的苗头,除了通过原来就有的图示及声音来提醒驾驶员注意之外,还会向方向盘施加扭矩,使车辆返回车道 内,这时无需启动跟踪功能。
善领科技最新行车记录仪
善领科技今年发布了新一代行 车记录仪产品善领VH5,该产品集合了导航、安全预警、免提通话、高清录影、倒车辅助影像等当前驾驶常用功能,并采用了最新定制安卓系统,完美兼容当前安 卓市场上大部分实用APP以扩展善领VH5功能。材料上善领VH5采用了订制24位防飞散显示电容屏,在高强度撞击时不会使屏幕飞出,更好的保护驾驶者安 全,并且使用德国进口拜尔材料作为固定外壳。
富士通无变形显示的3D图像技术
基 于富士通老的全景监控技术,新的全景技术首先在车辆周围建立虚拟的三维场景,再利用激光雷达搜集到的距离信息,将摄像头搜集到的图像投射到三维场景中的相 应表面上。该系统需要准确地布置每台摄像头和雷达的位置和角度,目的在于,当仅靠一个摄像头时,物体背面和侧面位于盲区,但是该盲区可以通过其他摄像头拍 到,通过整合,消除盲区。最后合成的图像效果好于仅使用一个摄像头和雷达的效果。
------------------------------
无线终端测试技术资料集锦——升级战打响,智测无线终端靠什么?
基于继电器MLX81150的车窗/天窗设计
汽车电动车窗和天窗主要由升降控制开关、电动机、升降机构和继电器等组成,它是利用开关控制电动机的电流方向,实现车窗和天窗的升(关)降(开)。
车窗和天窗电动机都是双向的,通过改变输入电枢绕组的电流方向使电动机以不同的方向旋转。每个车窗和天窗都有一个电动机,是一种不直接接地型电动机。所 有电动车窗都有两套控制装置如图一所示,一套为总开关,可由驾驶员通过总控制开关操纵四个车窗的升降;另一套为分开关,分别装在每个车窗中部,可由乘客操 纵身边车窗的升降。总开关和分开关互不干涉,均可独立控制。而天窗通过驾驶员操作开关远程控制天窗的开关。
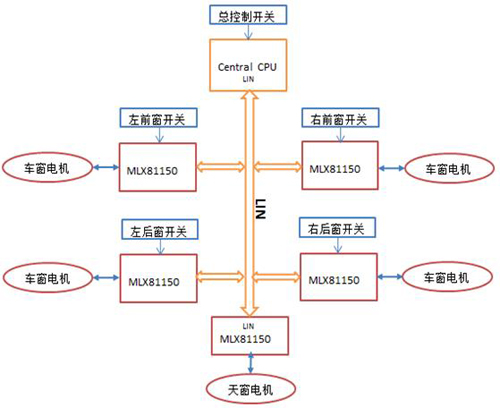
图1、 车窗/天窗控制结构图
汽车车窗和天窗是LIN总线的完美应用,尤其是驾驶员通过总控制开关操纵四个车窗的升降。当驾驶员操作车窗的开关时,中央ECU单元会通过LIN总线向对应的MXL81150发送指令,MXL81150接受到指令时会控制电机启动实现车窗或天窗的升(关)降(开)。
图2、 MCU与MLX81150通讯控制电机示意图
MLX81150有2个独立的、完全集成的继电器驱动器,可用来驱动继电器控制直流电机,操纵电机的正反转实现车窗和天窗的升(关)降(开),如图三所示。
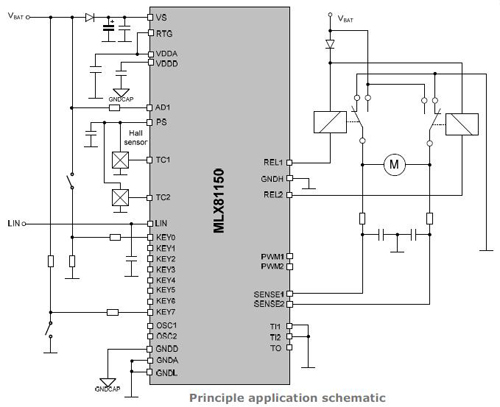
图3、 MLX81150继电器驱动原理图
MLX81150有四个功率FET栅极驱动器,可用来驱动全桥控制直流电机,操纵电机的正反转实现车窗和天窗的升(关)降(开),如图四所示。
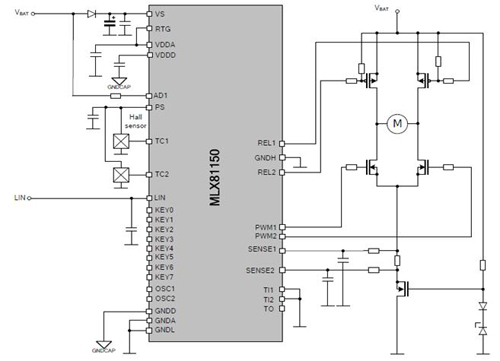
图4、 MLX81150 全桥驱动原理图
MXL81150主要性能:
• 集成有一个高性能16位嵌入式闪存微控制器,具有32K字节的闪存容量,可满足一些特定的电机控制应用要求,内置的4位中央处理器则能够完全处理LIN协议;
• 在小巧的封装内集成了许多对于电机控制非常关键的外部元件,减少芯片外围电路,减小PCB设计,降低了物料清单成本以及系统消耗的功率;
• 带有一LIN通信接口,通过LIN接受指令,控制电机的启动/停止,使得可以远程通信控制车窗/天窗的升(关)降(开);
• 带有两个继电驱动器和四个功率FET栅极驱动器,可以选择驱动继电器或全桥控制电机,通过PWM实现电机调速;
• 带有一个用于连接霍尔传感器的接口,通过霍尔传感器确定车窗/天窗的位置;
• 带有电流检测接口,通过检测电机运行电流的大小来实现防夹功能;
• 内部EEPROM用来存储车窗和天窗的位置参数;
• 休眠时的工作电流仅30uA;
• 正常工作电压范围5.5V—18V,芯片工作电压低至3.9V;28V的启动条件,45V的过压保护;
• 温度范围为-40℃ - 150℃;
详细资料:MXL81150:具有MCU、PWM与LAN收发器的控制器
安森美汽车电控制解决方案
安森美半导体公司的NCV7471系统基础芯片(SBC)集成了车体的汽车电控单元(ECU)的功能,提供和监视应用微控制器和其他负载的低压电源,通过看门狗监视应用软件,以及高速CAN和LIN收发器,使ECU成为多个通信节点或用作网关单元。
1.NCV7471 是一个系统基础芯片
NCV7471 是一个系统基础芯片(SBC),整合了汽车车身电子控制单元(ECU)的功能。NCV7471提供了(并监视)用于微控制器和其他负载的低电压电源,并通过监视应用程序来监视软件的运作。NCV7471还包括高速CAN和LIN收发器,可以使ECU承载多个通信节点,或充当网关单元。其片上状态控制器,确保了安全的上电顺序,并支持低功耗模式,还具有一些可配置的特性,包括通信总线唤醒或局部数字信号WU唤醒。NCV7471内部模块的状态可以通过串行外设接口,由微控制器进行读取,或被用来产生中断请求。

图1 NCV7471框图
NCV7471主要特性
•控制逻辑
- 确保安全的上电顺序,不同供电条件的正确反应
- 控制模式转换,包括电源管理、唤醒处理总线唤醒、局部唤醒(通过WU引脚)、和环唤醒(通过片内定时器)
- 生成复位和中断请求
•串行外设接口
- 运行16bit的帧
- 确保与ECU微控制器单元的通信
- 模式设置,芯片状态反馈和通过八个12位寄存器进行监督
•来自DC / DC转换器的5 V电源VOUT
- 最高可提供500mA的电流达到2% 的精度
- 一般用于ECU微控制器
- 适用于启动停止系统,最低电池电压2.5V
• 5V VOUT2 低压差输出稳压器
- 可提供外部载荷,如传感器
-通过SPI和状态机控制
- 防汽车电瓶短路保护
•一个高速CAN收发器
- ISO11898标准
- TxD主导的超时保护
•两个LIN收发器
- LIN2.1和J2602标准
•唤醒输入WU
-边沿触发高电压输入
- 可以用作唤醒源或通过SPI作为逻辑输入
•保护和监视功能
- 通过V_MID点,监测主电源
- 通过可编程的阈值,监测VOUT电源输出
- 通过SPI 和中断,诊断VOUT2电源
- 热警告和热关断保护
- 可编程看门狗监测ECU软件
•汽车车身控制模块

NCV7471应用框图
2.NCV7471系统基础芯片评估板
文档介绍了安森美半导体公司的NCV7471系统基础芯片(具有高速CAN、两个LIN收发器、升压-降压转换器和低压降稳压器)。NCV7471 EVB板可以对其功能及主要参数进行评估。
NCV7471系统基础芯片评估板主要特性
•单排针接头,提供了电路的信号,可以使评估板很容易插入到更复杂的应用程序
•对所有重要信号的示波器测试点
•主(电池)电源的反向保护和去耦
•具有所有必要的VOUT转换器外部元件-装配可选项
• VOUT上的解耦转换器,和VOUT2调节器输出
•漏极开路数字输出的额外上拉电阻(RSTN,INTN,UVN_VOUT)
•开关-监测唤醒输入的滤波电路
•板载本地唤醒开关
• CAN/LIN总线终端
•电路的裸露焊盘到底盘的,良好的热连接
•使用的软件开发模式的基本独立功能
1.概述
飞思卡尔与同济大学联合推出采用 MagniV S12VR MCU的面向汽车车窗玻璃升降系统的参考设计。 这个防夹车窗玻璃升降器参考设计展示了其在汽车设计中的功能,是电动车窗和遮阳板系统开发的理想之选。 该参考设计还包括真正的车门/窗应用所用的硬件,以及防夹算法和低级别S12VR驱动程序等软件。
这款参考设计利用了MagniV S12VR MCU独特的功能,旨在缩短产品上市时间。除了帮助减少不必要的外部元件,该参考设计还降低了总物料成本(BOM),提高了系统的质量,并通过采用更小的PCB节省了汽车应用的空间。
2.参考设计特性
1)车窗手动/自动上升/下降,通过停止功能自动上升/下降
2)手动/自动模式防夹,防夹区域和力度可调节。
3)防夹区域外的卡壳检测,电机过载保护
4)车窗接近顶部/底部时软停止
5)故障诊断,指示低电压、过电压/过电流/高温等。
6)低功耗模式(利用S12VR低功耗模式),以降低功耗
7)自学习,通过更新存储在EEPROM中的车窗/电机参数进行校准
8)使用霍尔传感器以及电流检测通过算法来判断防夹
9)易于控制的图形用户界面(GUI),可设置参数,获取状态信息
10)车窗玻璃升降器可以由多个LIN从节点或LIN主节点控制(通过GUI)
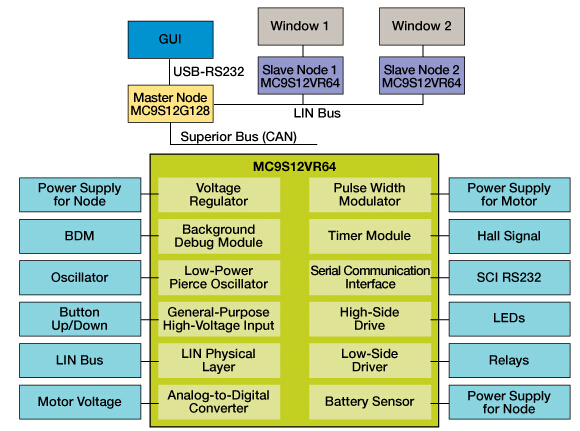
防夹升降车窗参考平台框图
3.支持器件
S12VR: 面向继电器驱动的电机应用的S12 MagniV混合信号MCU
S12VR系列将NVM、数字逻辑电路和高电压模拟组件组合成一个单芯片解决方案。这些模拟组件包括一个汽车稳压器、LIN物理层、低边驱动、高边驱动 和输入。新的高电压器件都能够承受汽车环境的严格要求(高达40V,这种情况在负载突降时会出现),这些器件与业界公认的16位S12 CPU和存储器子系统(包含受ECC保护的闪存和真实的EEPROM)集成在一起。S12 CPU与高性价比、高度集成的S12G系列MCU完全兼容。S12VR中的数字外设,如SPI、SCI串行模块、PWM和定时器模块等也具有兼容性。
S12VR 集成了一个系统中的所有元件,节省了宝贵的PCB空间,简化了设计,提高了系统的整体质量,降低了成本。更小的PCB意味着更小的机箱,在汽车应用中减去 一点点重量都会提高燃油效率。S12VR上可集成不同的组件,缩短了获得一个完整解决方案所需要的开发时间,从而大大加快了产品上市速度。带集成LIN- PHY的S12VR系列通过了主要汽车原始设备制造商的审核,满足LIN规范和EMC要求,现在还支持高达125°C的环境温度。
特性
1)S12 CPU内核,25 MHz总线
2)带有ECC功能的64 KB闪存
3)带有ECC功能的512 字节EEPROM
4)2 KB片上SRAM
5)LIN物理层
6)稳压器
7)两个低边驱动器,驱动感应负载
8)最多两个高边驱动器
9)4个高电压输入
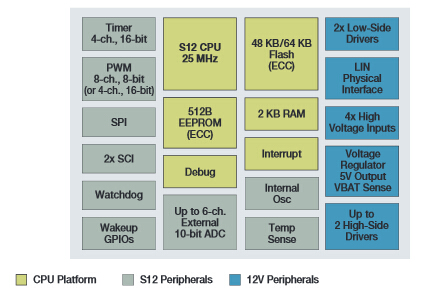
S12VR结构框图
Freescale MC33813小型发动器控制方案
Freescale公司的MC33813是一种发动机控制模拟电源集成电路,包括5个集成低边驱动器,两个预驱动器,一个VSR(可变磁阻传感器) 输入电路,一个采用外部传输晶体管的前置稳压器,以及两个5.0V内部稳压器,其中一个用于(MCU) VCC供电,另一个用作受保护的传感器电源,主要用在汽车电子,摩托车发动机控制单元(ECU)和小型发动机控制和直喷发动机。本文介绍了MC33813 主要特性,框图,应用电路,以及KIT33813AEEVBE评估板(EVB)主要特性,框图,电路图,材料清单等。
1.MC33813一种发动机控制模拟电源集成电路
MC33813 是一种发动机控制模拟电源集成电路,适用于单缸摩托车及其他小型发动机控制应用。IC包括5个集成低边驱动器,两个预驱动器,一个VSR(可变磁阻传感器)输入电路,一个采用外部传输晶体管的前置稳压器,以及两个5.0V内部稳压器,其中一个用于(MCU) VCC供电,另一个用作受保护的传感器电源。此外,还包括带看门狗的MCU复位控制电路、用于诊断通信的ISO 9141 K线接口以及一个SPI (串行外设接口)。5个低边驱动器,用于驱动一个喷油器,一个灯泡,两个继电器或者其他负载和一个转速表。预驱动器用于驱动IGBT或MOSFET晶体管来控制点火线圈和/或一个HEGO加热器。这两款器件采用48引脚LQFP封装,带裸焊盘。
MC33813主要特性:
设计的工作电压范围为4.5 V ≤ VPWR ≤ 36 V
确保逻辑稳定性的最低电压为2.5 V
一个喷油器-典型值 1.3 A
一个点火IGBT或通用门控预驱动器
一个O2传感器(HEGO)加热器,通用门控预驱动器
继电器1驱动器,典型值2.0 A,用于燃油泵控制
继电器2驱动器,典型值1.0 A,用于电源继电器控制
灯泡驱动器,典型值1.0 A,也可用于驱动一个LED
VPROT受保护的传感器电源,跟踪VCC +5.0 V 稳压器
MCU复位生成器-系统完整性监控器(看门狗)
VPP前置稳压器,为VCC和VPROT稳压器供电
独立的故障保护,所有故障通过SPI报告
ISO 9141 K-Line接口,用于传送诊断信息
启动/关闭控制和上电时序逻辑,实现电源控制
使用一个5.0 V SPI和逻辑I/O可直接与MCU连接
带有自动/手动选择阈值和滤波器时间的差分/单端VRS可调节电路,带有数字和转速输出
钥匙开关逻辑,用于设置功率继电器和MCU控制的关断。

图1.MC33813功能框图

图2.MC33813简化应用电路图
2.KIT33813AEEVBE评估板(EVB)
KIT33813AEEVBE 评估板(EVB)是一款易用的电路板,可让用户练习使用MC33813单缸小型发动器控制IC的所有功能。 PC通过连接到其USB端口的USB/SPI Dongle (KITUSBSPIDGLEVME)来与该EVB通信。飞思卡尔SPIGen (版本6.0)程序针对MC33813 SPI (串行外设接口)提供用户界面,可让用户向IC发送命令以及从IC接收状态信息。
图3.KIT33813AEEVBE评估板(EVB)外形图
图4.KIT33813AEEVBE评估板(EVB)和KITUSBSPIDGLEVME板建立图

图5.KIT33813AEEVBE评估板(EVB)框图
3.MC33813目标应用:
汽车电子
摩托车发动机控制单元(ECU)和小型发动机控制
直喷发动机
汽车光控制模块参考设计
Freescale公司的Kinetis KEA128系列产品是基于ARM Cortex-M0+内核的MCU,工作频率48MHz,单周期32位x32位乘法器,多达128KB闪存、256B EEPROM和16KB RAM,工作电压2.7V~5.5V,闪存写电压2.7V~5.5V,工作温度–40℃~+125℃。主要用在汽车娱乐连接模块、DC/BLDC马达控制、TPMS、电动摩托车CDI/EFI、电池管理、泵/风扇控制、窗/门/天窗控制、BCM/HVAC和座位/雨刷控制等。
1.Kinetis KEA128系列MCU
车用型Kinetis EA系列MCU,提供了高性价比的,ARM为基础的解决方案,可以广泛地用于汽车领域,并与KinetisEA系列及未来的Kinetis汽车系列引脚兼容。
这一系列包括一组模拟、通信、定时和控制外设,以及不同的闪存容量和引脚数。这些可扩展的设备非常强劲,并提供了增强的ESD/ EMC性能的解决方案,用于成本敏感的汽车领域。该系列具有开发工具、软件、和硬件参考的支持,快速启动设计。

图1 Kinetis KEA128系列MCU框图

图2 KEA128LEDLIGHTRD光控制模块参考设计框图
Kinetis KEA128主要特性
•工作特性
-电压范围:2.7V~5.5V,
-闪存的写入电压范围:2.7V~5.5V,
-温度范围(环境):-40℃~+125℃
•性能
-最高48MHz的ARM Cortex-M0+核
-单周期32位×32位乘法器
-单周期访问I/O端口
•存储器和存储器接口
-最高128KB的闪存
-最高256B的EEPROM
-最高16KB的RAM
•时钟
-振荡器(OSC)-loop控制皮尔斯振荡器,晶体或陶瓷谐振器系列31.25kHz~39.0625kHz或4MHz~24MHz
-内部时钟源(ICS)-内部FLL具有内部或外部参考,内部参考精确微调,允许-30℃~85℃温度范围1%的偏差和-40℃~125℃的温度范围,1.5%的偏差,最高48MHz
-内部1kHz低功耗振荡器(LPO)
•系统外设
-电源管理模块(PMC)与三种功率 模式:运行、等待、停止
-低电压检测(LVD)复位或中断,可选择的触发点
-看门狗具有独立的时钟源(WDOG)
-可编程循环冗余校验模块(CRC)
-串行线调试接口(SWD)
-位操作引擎(BME)
•安全性和完整性模块
- 80位的唯一的标识(ID)码(每片)
•人机界面(HMI)
-最多71个通用输入/输出(GPIO)
-最多两个32位键盘中断模块(KBI)
-外部中断(IRQ)
•模拟模块
-一个12位,最多16通道SAR ADC,具有内部带隙参考通道,停止模式下可运行,可选的硬件触发(ADC)
-两个模拟比较器,包含一个6位DAC和可编程参考输入(ACMP)
•计时器
-一个6通道FlexTimer/脉宽调制器(FTM)
-最多两个双通道FlexTimer/脉宽调制器(FTM)
-一个2通道周期中断定时器(PIT)
-一个实时时钟(RTC)
-最多1个16位脉冲宽度定时器
2.Kinetis KEA128目标应用:
信息娱乐系统连接模块、公园援助、直流/直流无刷电机控制、电子驻车制动、TPMS、摩托车点火/电喷、电池管理、泵/风扇控制器、被动入口始推、环境照明、BCM/暖通空调、窗/门/天窗、座椅/后视镜/雨刮器、防盗、动力总成配套芯片、通用传感器节点。
3.KEA128LEDLIGHTRD光控制模块参考设计
KEA128LEDLIGHTRD 光控模块参考设计,基于Kinetis EA MCU和E-开关(MC10XS3425)。照明控制参考设计是建立在Kinetis KEA128 32-bit ARM Cortex-M0+ automotive-grade MCU上。其整体硬件解决方案,包括,Kinetis KEA128 MCU、MC10XS3425EK、四高边驱动芯片MC33901 CAN收发器和MC33662 LIN收发器芯片。这包括LIN和CAN以通信为基础的,完整的大灯环境控制解决方案,包括LED灯、尾灯、转向灯、灯电流控制和诊断。硬件板卡已上市,可用于评估这个解决方案,它包括SWD连接器接口,用于调试SW。此外,还具有照明连接器接口,以提高该解决方案控制灯的数量。

图3 KEA128LEDLIGHTRD光控制模块参考设计电路图
光控制模块参考设计主要特性
• 32位KEA128MCU,64引脚LQFP封装
• MC33662 LIN收发器
• MC33901 CAN收发器
• MC10XS3425EK多芯片高边开关
• 4个LED
• 4个电位器
• 4个用户按钮
• SWD连接器接口,用于调试
•光连接器接口
KEA128LEDLIGHTRD光控制模块参考设计包括:
• Kinetis KEA128LEDLIGHTRD板
• DVD
------------------------------
无线终端测试技术资料集锦——升级战打响,智测无线终端靠什么?
-
 gyggnj
2019-05-18
0 回复 举报这套设备哪有的卖啊 收起回复
gyggnj
2019-05-18
0 回复 举报这套设备哪有的卖啊 收起回复
-
 cenjingdong
2015-02-03
0 回复 举报有个自制爱好QQ群214855527 收起回复
cenjingdong
2015-02-03
0 回复 举报有个自制爱好QQ群214855527 收起回复
-
车载电子设备可靠性测试标准2022-01-12 2588
-
汽车电子的控制技术详解2019-11-06 1497
-
汽车电子的发展前景如何?2019-10-31 4838
-
汽车电子设备的电磁干扰来源是什么?2019-08-05 3904
-
汽车电子设备的潜在缺陷怎么避免?2019-08-01 2618
-
电子设备在汽车中的影响越来越大2019-07-26 2900
-
汽车OBD技术2018-11-17 3031
-
【资料共享】汽车电子资料汇总2018-05-22 2628
-
汽车装备:电子设备越做越精2017-02-08 879
-
【汽车电子技术资料汇总】2012-08-18 98481
-
主题:飞思卡尔汽车电子中电机控制方案2010-01-20 2912
-
CAN总线汽车电子灯光控制技术2009-10-25 12166
全部0条评论

快来发表一下你的评论吧 !
