

干货!国产Cortex-A55人工智能实验箱机械臂跳舞实验案例
描述
一、实验目的
本实验通过TL3568-PlusTEB教学实验箱修改机械臂不同舵机的角度,增加延迟时间,从而做到机械臂跳舞的效果。
二、实验原理
ROS(机器人操作系统)
ROS(机器人操作系统),是专为机器人软件开发所设计出来的一套电脑操作系统架构。
ROS是一个开源的元级操作系统(后操作系统),提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
机械臂通过ROS机器人操控系统,简化了6自由度串行总线舵机复杂运动控制,可实现机械臂正解、反解、运动规划、机械碰撞检测、夹取分拣等功能。
虚拟机(Virtual Machine)
机械臂由虚拟机生成控制决策,STM32控制器驱动机械臂。
虚拟机(Virtual Machine)是指通过软件模拟的具有完整硬件系统功能的、运行在一个完全隔离环境中的完整计算机系统。
在计算机中创建虚拟机时,需要将实体机的部分硬盘和内存容量作为虚拟机的硬盘和内存容量。
每个虚拟机都有独立的CMOS、硬盘和操作系统,可以像使用实体机一样对虚拟机进行操作。
机械臂自由度
机械手自由度,是指传送机构机械手的运动灵活性。通常把传送机构的运动称为传送机构的自由度。
人从手指到肩部共有27个自由度。而如将机械手的手臂也制成这样多的自由度,既困难又不必要。
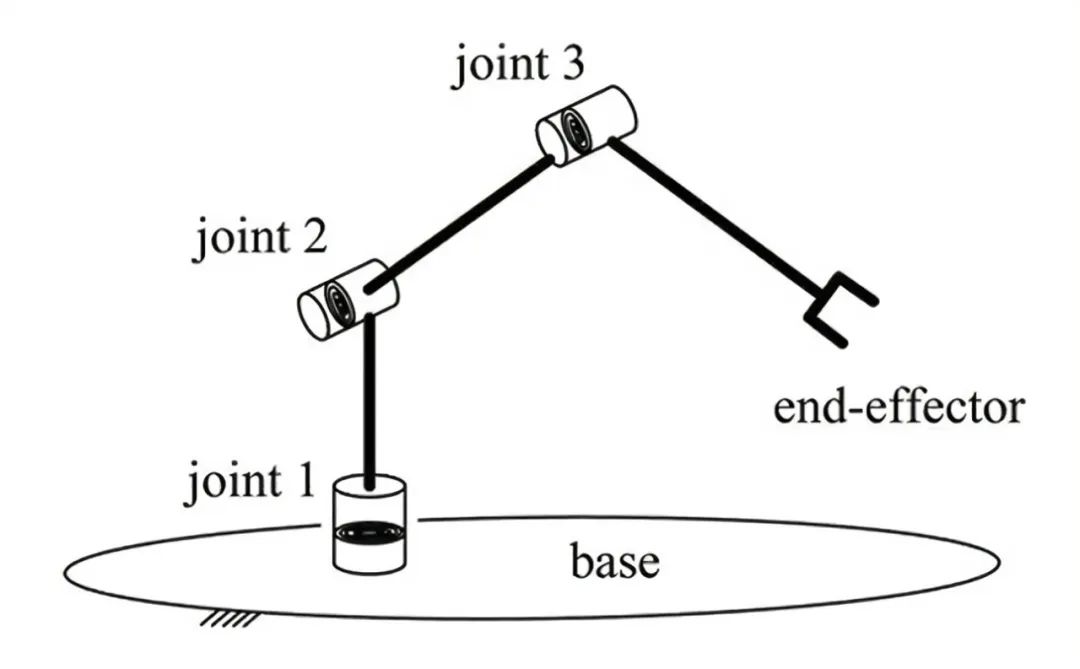
从力学的角度分析,物件在空间只有6个自由度。因此为抓取和传送在空间不同位置和方位物件,传送机构也应具有6个自由度。
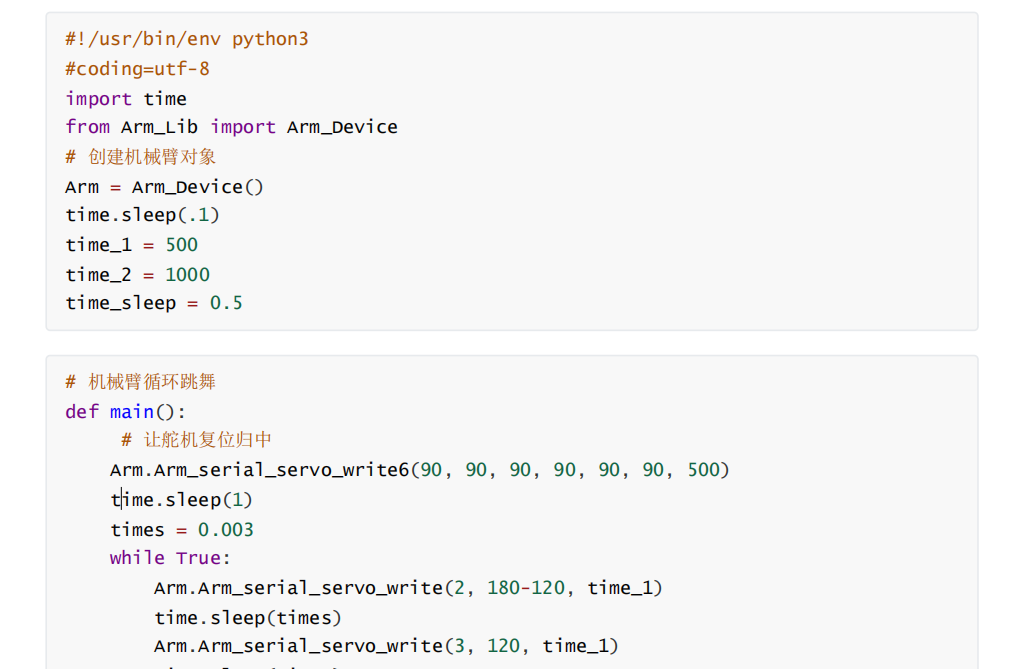
实验程序流程
1、创建机械臂对象
2、机械臂循环跳舞:让舵机复位归中
三、操作现象
人工智能实验箱重磅袭来!
基于 Cortex-A55 教学实验室建设方案
RK3568国产化高性能处理器
2.0GHz超高主频
1T超高算力NPU

兼容鸿蒙等国产操作系统





多元化教学专业与课程
教学专业 | 教学课程 |
人工智能 | 《人工智能》 |
自动化 | 《嵌入式系统设计》 |
物联网工程 | 《ARM系统开发》 |
计算机科学与技术 | 《无线传感器网络》 |
光电信息工程 | 《移动互联网技术》 |
通信工程 | 《物联网设计方法与应用》 |
电子信息工程 |
嵌入式基础实验
第一章
ARM实验环境搭建与Linux开发基础
第二章
Linux 设备驱动程序开发实验
第三章
Linux 设备驱动程序开发实验
第四章
基于ARM基础外设实验
第五章
Linux Qt 开发实验
第六章
Linux Python 开发实验
人工智能实验
第一章
Python基础章节实验
第二章
图像处理(Python OpenCV)实验
第三章
深度学习实验
第四章
机械学习实验
第五章
机器控制实验
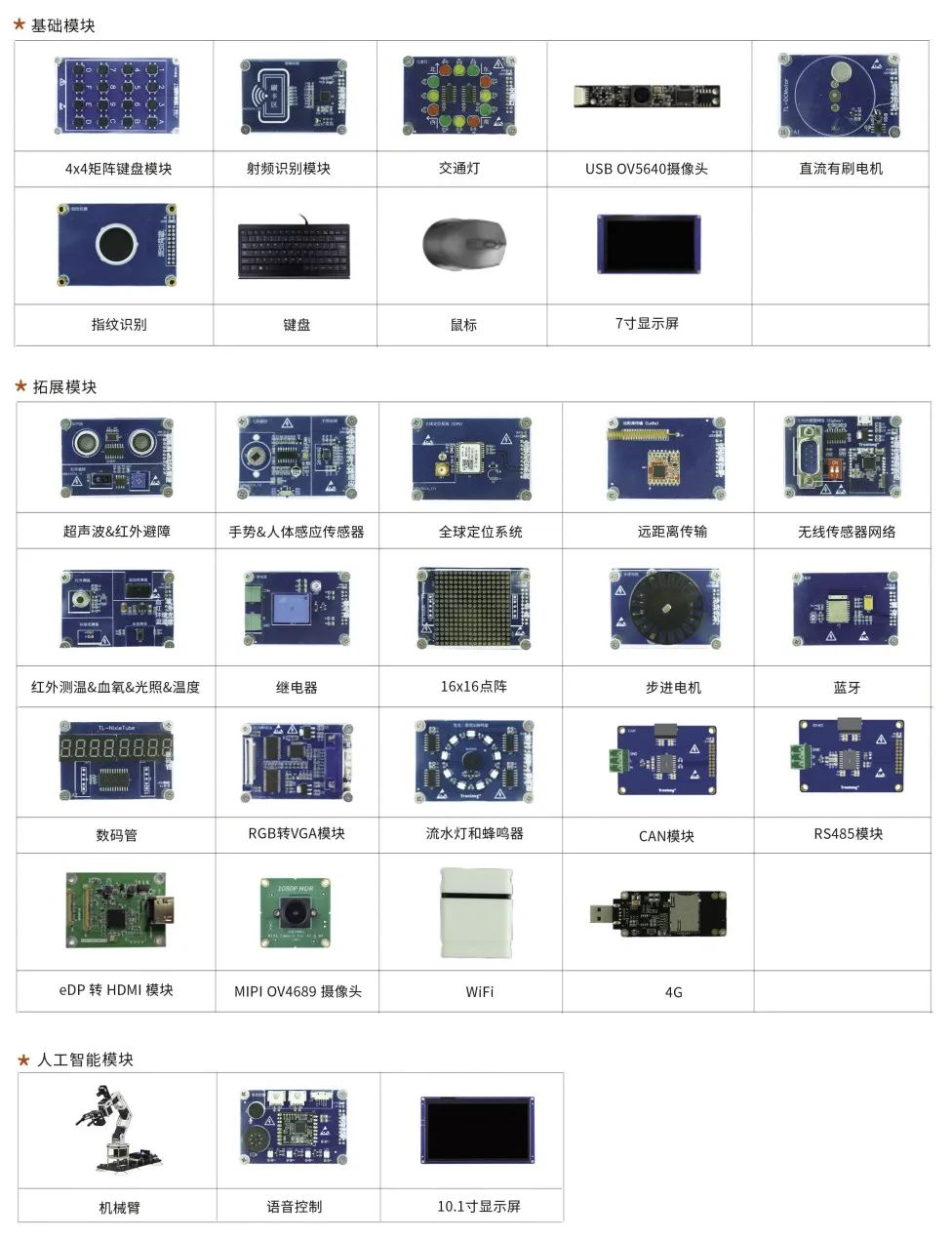
30+拓展模块任意搭配
-
挖到宝了!比邻星人工智能综合实验箱,高校新工科的宝藏神器!2025-08-07 4297
-
RK3568国产实验箱+人工智能机械臂:跳舞、叠罗汉、夹方块、积木搬运案例全解!2024-12-12 2575
-
国产Cortex-A55实验箱:轻松上手,人工智能环境搭建教程2024-11-08 1898
-
Cortex-A55人工智能教学实验箱操作教程_案例分享:5-26 血氧检测实验2024-10-15 4562
-
智能机械臂人脸识别特效丨国产Cortex-A55人工智能实验箱案例分享2024-08-30 1375
-
智能目标颜色识别抓取丨国产Cortex-A55人工智能实验箱机械臂案例分享2024-08-10 1262
-
国产Cortex-A55高性能人工智能实验箱机械臂姿态识别案例2024-07-19 1029
-
国产Cortex-A55人工智能教学实验箱_基于Python机械臂跳舞实验案例分享2024-06-28 6283
-
干货!国产Cortex-A55人工智能实验箱机械臂积木搬运实验案例2024-06-27 2234
-
为什么更推荐Cortex-A55教学实验箱?我来告诉您!2024-05-31 2304
-
基于“中国芯”RK3568 ARM Cortex-A55教学实验箱强势首发2024-04-04 2109
-
创龙教仪基于瑞芯微3568的ARM Cortex A-55教学实验箱 适用于人工智能 传感器 物联网等领域2024-03-22 13192
-
2018人工智能股票龙头2021-07-28 2143
-
人工智能专业该如何建设?实验环境如何建立?人工智能实验如何操作?2020-09-11 4185
全部0条评论

快来发表一下你的评论吧 !
