

3D三维扫描仪的光学测量技术知识
描述
从古老三角法到现代高精尖扫描仪
当我们对对物体进行三维测量时,一个非常重要的话题,便是如何捕捉被测点的空间三维坐标信息,而比较常用的方法就是三角测量法。人类对于三角测量法的应用由来已久,早在古埃及时期人们就已经使用三角测量法来进行测绘。而三本精密仪器的三维扫描仪,作为一类常见的光学测量仪器,其应用的主要测量方法即三角测量法。
三角测量的实现
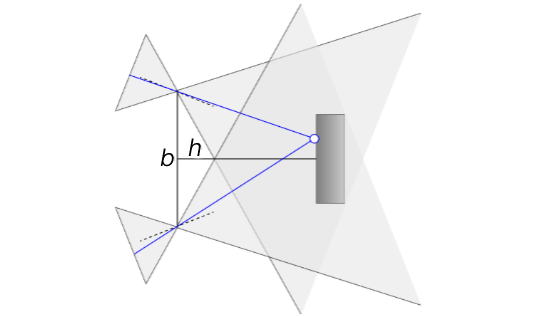
三角测量的基本构成要素分为测站,观测角和测站间距,根据三角形的基本性质即可计算出被测物体的距离。而在三维扫描仪中,三角测量由多个视图来完成,由多个相机中的照片来构成观测站,由对扫描仪的标定获得相机间距和夹角,从而构成三角计算的基本要素。那么接下来的问题就是在多视图的三角计算中,如何确定照片中哪个点是来自于物体表面上同一个位置的,即多视图中的同源点。为了克服这一问题,也就此发展出了各种不同的方法来实现对物体表面的“编码”过程。目前常见的两种方法即为面结构光扫描和线激光扫描。
面结构光扫描:精密的“光栅编织者”
面结构光扫描仪使用投射出来的光栅条纹来对所投射光线范围内的物体表面进行编码。常用的编码方法有,格雷码,相移法,外差法等。为了提高对于投影识别的精度,表面“编码”的计算常常以投射多幅图案的形式进行,即所谓“时域编码”,并进一步将多种方法相互融合,结合先进的数字光线处理技术可以实现高精度的表面数据计算,实现工业级精密测量。这一技术具有精度高,表面数据获取效率高,溯源性强的特点。
线激光三维扫描:便携的“激光画师”
线激光三维扫描仪主要使用激光线来进行物体表面编码。与面结构光不同,线激光由于在整个面上并不连续,因此单次拍摄所投射出的激光线即可实现表面数据的计算。连续不断地拍摄激光线所“扫过”的位置即可实现三维扫描。由于其投射的激光线区域相对较小,对激光器功率要求更低,单次拍摄时间较短,因此可以实现更小体积的手持式扫描。其具有便携,使用方便,适用场景广泛的特点。

ZEISS ATOS家族
ZEISS ATOS家族产品是结构光三维扫描领域的佼佼者,其结构光技术经过数十年的经验积累,使其展现出出色的精度,高细节分辨能力,良好的设备稳定性,使其获得了众多用户的认可。而面结构光的另一大问题在于如何使得投射出的光线在更大的范围内仍然保持高亮度和均一性。ATOS家族产品中除了使用LED光源外,也克服了激光技术的一些问题,采用面激光实现了更高亮度的条纹投影,即ATOS 5X三维扫描仪,实现更大范围的快速扫描。
由于面结构光三维扫描的“时域编码”的特点,其更容易实现多图像的采集,因此其对于部件特征的计算方法也更为多样,如“灰度值特征”等方法都是基于面结构光所开发出来的。面结构光三维扫描仪也更容易实现对于薄壁部件的特征采集,结合其大测量范围,可以更加快速地获取完整的表面数据。因此广泛地应用于包括汽车制造,消费电子,航空航天等诸多有着高质量要求的行业。
-
德国蔡司工业级3D三维扫描仪抄数机2024-04-25 1523
-
蔡司3D三维扫描仪激光抄数设备2024-04-17 1373
-
蔡司激光手持三维扫描仪蓝光3D扫描仪问题探讨2023-12-14 2433
-
三维抄数机(激光3D扫描仪)2023-08-12 3178
-
3D三维扫描仪的扫描测量技术原理2023-07-11 4234
-
手持式蓝光3D三维扫描仪的扫描方式2023-06-15 2502
-
3D建模服务三维扫描测量CAD画图服务2023-03-31 1869
-
SMARTSCAN三维扫描仪电子产品配件三维扫描服务2020-09-17 2155
-
Handyscan三维扫描仪机械零部件三维扫描抄数服务2020-07-21 1331
-
Handyscan三维扫描仪对户外大型灯箱三维扫描解决方案2020-07-15 1478
-
高精度三维蓝光扫描仪超高精度三维激光扫描仪3D激光扫描仪设备2020-04-08 5922
-
汽车整车三维扫描有手持式蓝光扫描仪就够啦!2019-10-20 8247
-
博物馆彩色三维扫描仪应用方案2018-08-29 4672
-
三维扫描仪使用方法及操作技巧2017-12-18 23937
全部0条评论

快来发表一下你的评论吧 !
