

无人机系统解决方案及应用趋势集锦TOP7
电子技术
描述
TOP1 无人机无线通信技术解决方案
无人机作为空中机器人,在军事上可用与侦查、监视等,在民用 上可用于大地测量、摇感等,主要希望能获得高分辨率、能描述物体集合形态的二位或三维图像,但是高分辨率图像数据量相当大,而且随着地面分辨率提高,需要传输的图像数据量呈几何级数增长,数据码数率也迅速增长,因此,图像的高速传输已经成为制约无人机应用的重要问题。
设计特点
A.体积小巧:发射机体积小巧,重量轻,能够减少无人机承载压力,有易于无人机空中任务完成。B.可靠性高:系统采用先进的COFDM调制技术,抗干扰能力非常强,同时采用256位AES加密技术,能够有效的防止干扰和窃听。C.易用性强:采用高科技手段,进行智能化设计,尽量减少系统操作的复杂性,并作到系统工作稳定可靠,维护简单。D.传输距离远:系统功率控制在1W以内,利用无人机飞行高度,能够保障传输距离在3公里以上,同时系统有较强的绕射能力和穿透能力,能够应对建筑物阻挡问题。E.传输图像清晰:系统采用最新H.264/MPEG-2/4压缩方式,所传视频能够达到D1效果,使无人机所拍的图像清晰展现至用户面前。
方案设计
根据用户需求本方案设计效果图如下;
无人机上安装有视频采集设备、无线图像发射机、电池等。将无线图像发射机与电池固定在无人机底部,运用-3馈线将发射天线垂直安装在机尾(也可根据用户需求进行安装)。将无人机视频源与发射机连接,使其形成完整的无人机无线视频发射系统。无人机无线视频发射机发射的信号通过地面无线图像接收平台接收,接收平台可以清晰的将无人机采集到的图像显示在显示屏幕上,也可通过平台外接口将视频信号传至其他显示/存储设备上。同时地面接收平台可内嵌网络传输模块,将视频信号运用网络传输方式,传至后端中心站。
ORANGE系列产品技术优势 ORANGE系列产品采用先进的COFDM(信道编码的正交频分复用)全数字调制解调技术及MPEG2/MPEG4/H.264数字压缩编码技术,具备以下特点: 具备“非视距”、“绕射”和良好穿透能力 COFDM调制技术具备多径分集能力,抗多径干扰能力强,具备“非视距”、“绕射”传输特点和良好穿透能力,适应在城区、山地、建筑物内外等不能通视及有阻挡的环境中应用。
产品介绍
根据用户提供的技术要求我们见意您使用机载微型发射机和便携式一体接收机,如下图所示;
机载微型发射机外观图
发射天线
“Orange机载微型发射机”采用超微型模块外观设计,具有体积小(100mm×55mm×23mm)、重量轻(260g)、功耗低(<10W)、灵敏度高(-108db)、安装灵活等特点,它集小型天线、微型功放、数字调制、视音频数字压缩于一体,可用于现场高清晰图像传输,通视条件下传输距离可达 10公里以上。广泛的应用在公安、部队、应急、资源勘探、广播电视等行业中的军事侦察、无人侦察机、机器人侦查、新闻媒体摄像机、技术侦察、消防救灾等行动。
便携式一体接收机
接收天线
吸盘
“Orange便携式一体接收机”采用专业防潮箱外形结构,适合野外安装使用,设备采用交流、直流两种供电方式。集液晶显示、电池供电、录像存储(定制)、网络传输(定制)、各种外接口与一体,具有在野外、室内任何地点即开即用的优势,操作简单、功能齐全,配合我公司无线发射前段使用,是公安、武警、军队、地质灾害、消防等部门用于现场侦查的良好工具。设备提供多种接口:包括标准音视频接口(BNC、莲花头)、以太网接口(10/100BASE-T自适应),RS232数据接口。预留GPS数据接口和双向语音业务接口。
TOP2 无人机应用于航空测绘的解决方案
随着3S技术为代表的高新测绘技术和计算机技术的快速发展,传统的测绘行业正在迅速向地理信息产业转化。传统的测绘生产主体模式已发生根本性变化,产品由模拟形式转为数字形式,大量的外业测量被室内地理信息采集所取代。地理信息的采集、存贮、加工和分发已成为一种全新的概念。
随着市场经济体制的建立和不断完善,测绘市场发育趋向成熟。首先,测绘产品的需求不断增大,服务领域不断拓宽。近年来,除传统用户外,电信、公安、环保、金融等行业的需求不断增长,测绘产品的服务面几乎覆盖了国民经济的所有行业,初步实现了测绘为国民经济建设、国防、民众和政府服务的行业目标,充分显示了测绘行业的重要性。
二、行业需求分析
三、无人机航空测绘系统具体解决方案
(一)应用无人机遥感技术采集数据
我司通过无人机航摄所获取的竖直摄影影像、交向摄影影像、倾斜影影像以及复杂航线多基线摄影影像;通过多视影像匹配自动构建空中三角测量网,能进行多达 10000片影像的大区域网光束平差;配合低空遥感的高分辨率影像,实现高精度航测定位;并且,能自动化生产数字高程模型(DEM)和数字正射影像(DOM)等产品。
(1)快速响应
无人机航测通常低空飞行,空域申请便利,受气候条件影响较小。对起降场地的要求,可通过一段较为平整的路面实现起降。升空准备时间15分钟即可、操作简单、运输便利。车载系统可迅速到达作业区附近设站,根据任务要求每天可获取数十至两百平方公里的航测结果。
(2)快速获取地表数据和建模
系统携带的数码相机、数字彩色航摄相机等设备可快速获取地表信息,获取超高分辨率数字影像和高精度定位数据,生成DEM、三维正射影像图、三维景观模型、三维地表模型等二维、三维可视化数据,便于进行各类环境下应用系统的开发和应用。
(二)利用像素工厂进行后期数据处理
利用无人机遥感技术,结合像素工厂进行信息处理和分析。所得的数据将成立体三维图像,实时反馈给主管部门。
像素工厂(Pixel Factory,PF)由法国SPOT INFOTERRA公司研制开发,是一套用于大型生产的对地观测数据处理系统,是一种能批量生产,且由一系列算法、工作流程和硬件设备组成的复合最优化系统,包含具有强大计算能力的若干个计算节点。输入航空数码影像、卫星影像、或者传统光学扫描影像,在少量人工干预的条件下,经过一系列自动化处理,输出包括数字表面模型(DSM)、数字高程模型(DEM)、正射影像(DOM)以及真正射影像(TDOM)等产品,并能生成一系列其他中间产品。
TOP3 正射影像和传统正射影像
1. 大规模生产真正射影像和传统正射影像
真正射影像(TrueOrtho™)指所有物体的倾斜均被纠正的一种镶嵌影像。它是利用数字表面模型DSM,采用数字微分纠正技术,改正原始影像的几何变形,保证影像上每点都是完全垂直视角。像素工厂可以通过对多视角的影像逐点计算,消除所有倾斜,生成真正射影像。与传统的正射影像相比,在大比例尺影像图中,避免了高大建筑的倾斜对其它地物的遮挡,在拼接地区能够实现平滑自然的过渡。利用完美的DSM 能够生成完美的真正射影像。像素工厂实现了真正射产品的商业化和大规模生产,并实现了针对真正射影像的一系列解决方案,例如大气纠正、物理纠正、匀色等。真正射影像图直接用于做线画图,可大大降低制图成本,提高作业效率。
传统摄影测量处理中,经过数字高程模型(DEM)校正、镶嵌得到正射影像。根据影像获取的几何原理,繁华的城市地区需要一些手工编辑以最小化每张影像的视差(建筑物倾斜) 。而真正射影像通过高精度DSM纠正消除了所有视差,建立了完全垂直视角的地表景观,建筑物保持垂直视角,因此在真正射影像上,只显示了建筑物的顶部,不显示侧面,避免了高大建筑物对其他地表信息(其他较矮建筑物、道路、停车场、绿地等)的遮挡,恢复了桥梁的正确方位。下图反映了传统正射影像与真正射影像之间的主要区别。
(a) 传统正射影像中有建筑物倾斜效果
(b) 真正射影像中没有任何建筑物倾斜效果
像素工厂专利产品-真正射影像™(全自动处理)
传统正射影像
真正射影像
2. 数字表面模型(DSM)
像素工厂具有全自动提取密集数字表面模型DSM的能力,与传统摄影测量系统相比,像素工厂的优势之一就在于数字表面模型(DSM) 的计算。传统的摄影测量系统计算DSM 需要人工估计高程信息,而“像素工厂”则可以在25cm 到1m 的地面采样距离(GSD) 之间自动进行DSM 计算, 无需人工干预。
在加载了影像数据之后,像素工厂会利用专有的算法生成大量立体像对,并将这些立体像对分配到可用的计算结点上进行并行计算,这样可以减少立体像对匹配过程所花费的时间。根据对多视角数据的自动多重相关,可轻松提取DSM,航向和旁向的立体像对之间通过多相关方法进行匹配,这是一个逐点进行计算的过程。自动化算法可从原始影像每两像素提取高程信息,最后通过融合得到数字表面模型。此外,像素工厂系统可以导入导出 LAS(LIDAR)格式数据,因此可对LIDAR DSM和多重相关生成的DSM进行混合。
3.数字地形模型(DTM)
像素工厂通过对DSM采取滤波算法,可半自动化的生成DTM,减少50%到95%的人工编辑。
TOP4 无人机高清影像实时压缩处理传输平台解决方案
无人机低空航拍摄影技术作为一项空间数据获取的重要手段,具有续航时间长、影像实时传输、高危地区探测、成本低、高分辨率、机动灵活等优点,是卫星遥感与有人机航空遥感的有力补充,在国外已得到广泛应用。而随着我国信息化建设和科学技术的不断进步和发展,无人机的研究发展在总体设计、飞行控制、组合导航、中继数据链路系统、传感器技术、图像传输、信息对抗与反对抗、发射回收、生产制造和实际应用等诸多技术领域都有了长足的进步,达到了实际应用水平。这些致使无人机低空航拍摄影的广泛应用已经成为必然趋势,2009年国家遥感、测绘系统大力推动该技术发展,促使无人机低空航拍摄影项目逐渐成为测绘、规划、应急等国家单位积极推行的先进项目和技术示范项目。
平台介绍
机载图像处理系统需要处理的视频种类多样,如高清晰光学相机拍摄的运动视频或者高分辨率图片,机载SAR成像系统产生的SAR图像。以上视频或图像都需要压缩编码,然后存储或传输。本项目是以无人机为飞行平台,利用高分辨CCD相机系统获取遥感影像,利用空中和地面控制系统实现影像的自动拍摄和获取,同时实现航迹的规划和监控、信息数据的压缩和自动传输、影像预处理等功能,可广泛应用于国家生态环境保护、矿产资源勘探、海洋环境监测、土地利用调查、水资源开发、农作物长势监测与估产、农业作业、自然灾害监测与评估、城市规划与市政管理、森林病虫害防护与监测、公共安全、国防事业、数字地球等领域。
项目主要用于遥感影像的获取,同时可以根据需要搭配卫星遥感和有人机遥感平台,实现高低搭配,优势互补。无人机低空航拍摄影广泛应用于国家基础地图测绘、数字城市建设、通信站点建设、国土资源调查、土地地籍管理、城市规划、突发事件实时监测、灾害预测与评估、城市交通、网线铺设、数字农业、测绘、环境治理、生态保护、森林管理、矿产开发等领域,对国民经济的发展具有十分重要的现实意义。
1、项目内容
机载视频图像种类多样,要求编码器具备很高的处理能力和灵活性。基于CCD传感器+DM6467的智能视频处理套件说明书,广泛用于智能监控、电子警察、视频会议、生物仪器、机器视觉等领域。该平台主要通过CCD传感器采集图像,通过DSP进行信号处理,获得智能信息,并进行图像压缩和抓拍。从而为各种应用提供报警信息和现场采样。
CCD传感器主要采用sony ICX274AL芯片。
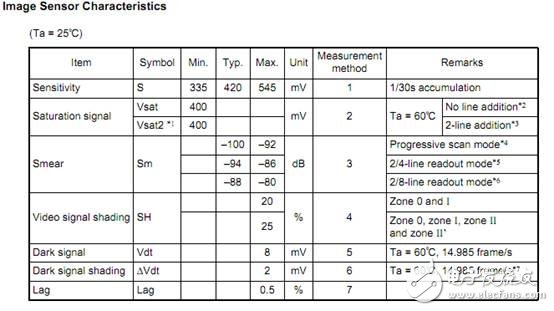
TI 芯片TMS320DM6467,为TI 新一代高清视频处理芯片,通过其多内核设计,能实现较前代数字媒体处理器高十倍的性能。DM6467 处理器集成了 ARM 与 DSP 内核,并采用高清视频/影像协处理器 (HD-VICP)、视频数据转换引擎以及目标视频端口接口。HD-VICP 通过面向 HD 1080i H.264 high profile 转码的专用加速器,实现了超过 3 GHz 的DSP 处理能力,同时视频数据转换引擎还能管理包括垂直下调节 (downscaling)、色度采样 (chroma sampling) 以及菜单覆盖 (menu overlay) 功能等在内的视频处理任务。DSP 内核可用于管理多格式视频转码,并为支持其它应用性能预留了足够空间。DM6467 可满足媒体网关与 MCU 等需要转码技术的市场要求,但其强大的灵活性与高效性对要求同时进行高清编码与解码的应用来说也非常具有吸引力,如视频语音或视频安全等对于多通道标清编码要求较高的市场。该器件的连接外设中还包括业界标准 PCI 总线与千兆以太网。
TOP5 开发以该芯片为基础的硬件平台
开发以该芯片为基础的硬件平台是本项目的核心内容,主要功能如下:
1)相机结构为自定义尺寸,大小为100mm X 70mm X 56mm 2)系统采用DSP+FPGA为核心结构,DSP为TMS320DM6467 主频为729MHz,FPGA为Altera芯片 EP3C25F324。3)支持 一路高清CCD 200万象素的原始数据流输入接口。4)支持一路千兆网络传输,为RJ45电口。5)支持1路RS232通信,兼容RS485。6)支持自动光圈,自动电子快门功能,适应不同监控环境7)工作电压:电压/直流12V,功耗小于5W。8)环境条件: 工作温度:-20℃~+60℃;存储温度:-45℃~+65℃;相对湿度:《=95±3%,+35±3℃;9)振动、冲击要求为:振动:2g(20Hz~500Hz~20Hz)(刚性);冲击:垂直轴向 ≥15g;横轴方向 ≥10g;纵轴方向 ≥10g
3、软件支持
1)支持linux 操作系统2)支持H.264的视频压缩,Jpeg图片压缩。3)支持高清和 CIF 双码流输出4)支持网络的RTCP UDP数据发送.5)支持客户端测试程序。6)根基您的需要可以植入其它算法。
4、应用范围:
可用于人脸识别、车牌识别、行为识别、机器视觉、生产线检测、生物仪器、医疗仪器等二次开发和使用。
产品实例
无人机系统通过配置摄像机、高分辨率照相机、红外夜视仪和图像传输等任务设备,实现空中巡视,并在巡视中实时传回视频图像,存储高清照片供返回地面处理,其中红外夜视仪的配置满足夜晚的巡视要求。
航拍原图:
实际比例局部图:
TOP6 基于PC104无人机网络视频系统的构建
无人机具有体积小、重量轻、灵活机动、成本低等特点,可以用于对地侦察拍照,还可以广泛应用于军事侦察、地质勘探以及对火灾等危险区域的勘察预报等,因而在无人机上构建一个网络视频系统就显得十分重要。本文以基于 PC104的无人机为基础,构建一个网络视频系统,其中,无人机视频数据的采集、压缩、解压缩、传输都是无人机网络视频系统中的关键技术,本文将针对这几部分的关键问题进行研究。
1 系统结构及工作原理
该系统的下位机主要由深圳桑达公司的PC104工控机、罗技快看太空版MP摄像头(USB接口)、linksysWRT54GC-CN无线路由器及外围电路组成,采用嵌入式 Linux 2.4.26操作系统,主要负责视频数据的采集,压缩及将数据发送到上位机。上位机是包含有无线网卡的PC电脑,主要负责视频数据的接收、解压和显示,上下位机通过UDP/IP网络协议进行数据的传输,采用socket网络编程可以实现网络的互联及数据的收发。PC104工控机采用嵌人式专用CPU PⅢ533~933 MHz,板载DDR内存高达128MB,提供2个RS 232串行接口,2个USB接口,1个并行口,软盘驱动器接口,IDE硬盘驱动器,10/100 Base-TX Ethernet接口,CRT/LCD显示器接口和固态盘插座,支持DiskOnChip 8~288 MB。PC104工控机的操作和使用与PC机相同,安装系统硬件后,即可开机进行BIOS设置,输入电压必须为+5 V,其波动范围不超过5%。
2 视频数据采集的软件实现
Video4Linux(V4L)是嵌入式Linux下视频设备的内核驱动,他为Linux下的视频设备提供了一系列的接口函数,在编译和配置内核阶段,必须增加V4L模块和USB摄像头驱动模块的支持。对于USB接口摄像头,其驱动程序中需要提供基本的I/O操作函数 open,read,write,close的实现,对中断的处理实现,内存映射功能以及对I/O通道的控制接口函数ioctl的实现等,并把他们定义在 struct file operations中。这样当应用程序对设备文件进行诸如open等系统调用操作时,Linux内核将通过fileoperations结构访问驱动程序提供的函数。在系统平台上对USB摄像头进行驱动,首先把USB控制器驱动模块静态编译进内核,使平台中支持USB接口,再在需要使用摄像头采集时,使用insmode动态加载其驱动模块,这样摄像头就可正常工作了。
在USB摄像头被驱动后,再利用Video4Linux支持的几个视频采集相关的数据结构进行编程,就可以实现视频数据的采集。图1是嵌入式Linux下视频数据采集的流程:
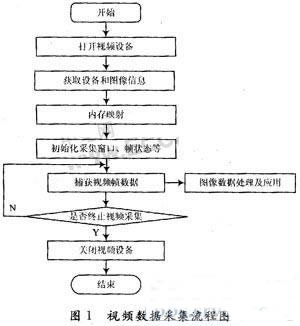
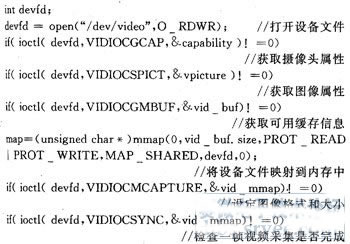
使用ioctl(devfd,VIDIOCSYNC,&vid_mmap)函数判断一帧图像是否截取完毕,成功返回表示截取完毕,之后就可把图像数据保存成文件的形式。为了得到连续帧视频图像,可在单帧的基础上,利用vid_buf.frames值确定采集完摄像头帧缓冲区帧数据进行循环的次数。在循环语句中,也是使用VIDIOCMCAPTURE ioctl和VIDIOCSYNC ioct1函数完成每帧截取,但要给采集到的每帧图像赋地址,利用语句buf=map+vid_buf.off-sets[frame],然后保存成文件的形式。
3 视频数据压缩原理
无人机系统的下位机要求实时传输视频数据到上位机,由于视频数据量较大且网络带宽非常宝贵,对视频数据选用一种高压缩比的文件格式显得十分重要。 JPEG是联合图像专家组(Joint Picture Expert Group)的英文缩写,是国际标准化组织(ISO)和CCITT联合制定的静态图像的压缩编码标准。和相同图像质量的其他常用文件格式(如 GIF,TIFF,PCX)相比,JPEG是目前静态图像中压缩比最高的,而图像质量却差不多。正是由于JPEG的高压缩比,使得他广泛地应用于多媒体和网络编程中。
JPEG-专家组开发了两种基本的压缩算法,一种是采用以离散余弦变换(Discrete Cosine Transform,DCT)为基础的有损压缩算法,另一种是采用以预测技术为基础的无损压缩算法。使用有损压缩算法时,在压缩比为25:1的情况下,压缩后还原得到的图像与原始图像相比较,非图像专家难于找出他们之间的区别,因此得到了广泛的应用。JPEG压缩是有损压缩,他利用了人的视角系统的特性,使用量化和无损压缩编码相结合来去掉视角的冗余信息和数据本身的冗余信息。JPEG算法框图如图2所示。
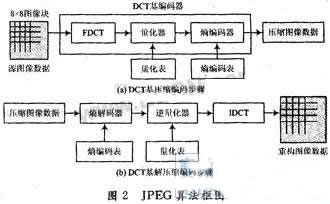
压缩编码大致分成3个步骤:
(1) 通过DCT去除数据冗余。DCT是影像压缩的重要步骤,他通过正交变换将图像由空间域转换为频率域。对于N×N维的数据,经变换以后仍然得到N×N的数据,虽然DCT变换本身并不对影像进行压缩,但变换消除了N×N维数据之间的冗余性。DCT变换是压缩过程中量化和编码的基础。
(2) 使用量化表对DCT系数进行量化。量化表是一个量化系数矩阵,通过量化可以降低整数的精度,减少整数存储所需的位数。量化过程除掉了一些高频分量,损失了高频分量上的细节。由于人类视觉系统对高空间频率远没有低频敏感,经过量化处理的图像从视觉效果来看损失很小。由于低空间频率中包含大量的影像信息,经过量化处理后,在高空间频率段,出现大量连续的零,这有利于以后通过编码减小数据量。
(3) 对量化后的DCT系数进行编码使其熵达到最小。遥感图像数据经过DCT和量化之后,在高频率段会出现大量连续的零,采用Huffman可变字长编码,可使冗余量达到最小。
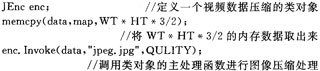
译码或者叫做解压缩的过程与压缩编码过程正好相反。根据上述JPEG数据压缩解压原理,在C编译器和集成开发环境(Code Composer Studio,CCS)中开发实现了图像压缩解压程序,便可应用于无人机视频数据的处理中。视频数据压缩处理程序的接口如下:
4 网络传输协议及socket编程
根据OSI网络标准定义,网络由物理层、数据链路层、网络层、传输层、会话层、表示层和应用层7层组成。而在实际应用中,网络结构可采用链路层、网络层、传输层和应用层4层模型。
在TCP/IP协议组中,IP协议是网络层协议。TCP协议是一种面向连接的协议,他能够提供可靠的、全双工的网络通信服务,具有确认、数据流控制、多路复用和数据同步等功能,适合高质量数据的传输,是目前应用最为广泛的网络传输协议之一。但是,由于TCP协议实现复杂,网络开销大,以及其提供的确认与超时重传机制都给数据传输带来很大的时延。因此TCP协议不适合传输实时视频数据和突发性的大量数据。
UDP协议是无连接协议,报文交换机理简单,不存在多重确认机制,从而减少了因建立连接和撤除连接所需要的巨大开销。每个分组都携带完整的目的地址,在各分组系统中独立传送,他不保证分组的先后顺序,不进行分组出错的恢复与重传,因此无法保证传输的可靠性和服务质量。但是相对于TCP协议,UDP 协议减少了确认、同步等操作,节省了很大的网络开销。他能够提供高传输效率的数据报服务,能够实现数据的实时性传输,在数据的实时传输中应用广泛。为了保证无人机视频数据传输的实时性,采用IP协议和UDP协议作为系统的通信协议。
系统中网络传输部分的软件实现采用socket(套接口)编程技术,系统调用socket()函数,返回一个整型的socket描述符,视频数据传输便是通过该socket函数实现的。常用的socket类型对应于传输协议也有两种:流式socket和数据报式socket。前者使用TCP协议,后者使用UDP协议,本系统中采用的是数据报式socket。以下是下位机socket编程的主要实现:
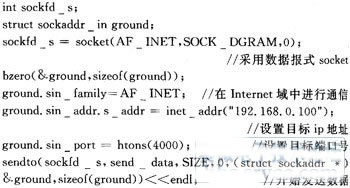
由上位机的无线网卡负责接收下位机的视频数据,并根据JPEG图像的解压原理对视频数据进行解压缩并显示。图3,图4可以看到从下位机采集到视频数据并通过处理之后发到上位机然后显示出来的效果。
本文主要介绍了一种基于PC104无人机的视频系统构建方法和流程,以PC104工控机为主要硬件平台,完成了对摄像头视频数据的采集、压缩、传输等过程的详细介绍和软件设计,采用网络UDP/IP网络传输协议和socket编程传输视频数据,保证了一定程度上的实时性,可以满足无人机地质勘探、火灾侦察等领域的应用。
TOP7浅谈无人机飞控系统解决方案
随着科学技术的发展以及军事战略思想的转变,无人机在军事、民用等领域获的应用越来越广泛,比如航空测量、航空摄影、侦察、森林防火等。为解决困扰我国无人机发展的高精度和小型化的难题,我公司经过几年的研究终于攻克了难关,开发出一套具有我国自主知识产权的无人机飞控系统。高精度要求无人机的制导控制精度高,能够适应复杂的外界环境。小型化则对控制系统的重量和体积提出了更高的要求,要求控制部件的体积越小越好。
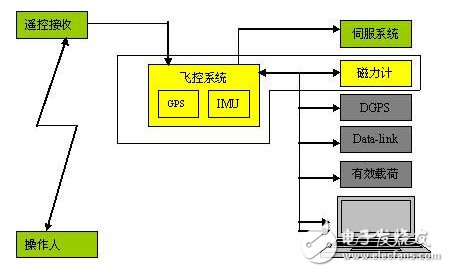
控制系统由四部分组成
嵌入式计算机系统、GPS 接收模块、IMU、接口
软件界面
方案特点
姿态和速度控制,正常情况下使用姿态稳定和速度控制,在出现较大的干扰情况下使用速度稳定和姿态控制,大大增加了飞行安全;实现了遥控手柄、航路点和地形匹配引导功能。可以由外环生成内环控制指令;通过扩展卡尔曼(EKF)滤波实现GPS/INS 捷联组合导航;对飞行负载、重心等变化的自适应性,大大提高了飞行精度和飞行安全; 3M 数据记录空间; 导航算法对震动和其他干扰适应能力强。即使在恶劣的震动情况下也能得到满意的导航数据;使用VxWorks 或uCOS 操作系统,实时强,可靠性高,方便裁减,方便在不同硬件平台上移植。对硬件的依赖性低。
无人机技术专题:让你了解最前端设计,详情请进入》》》
-
TE Connectivity发布商用无人机趋势报告及解决方案2023-06-03 1893
-
商用无人机最新趋势和解决方案的设计见解2021-06-25 3204
-
航模/无人机遥控的解决方案2020-07-03 3459
-
多轴无人机BLDC驱动解决方案2020-07-02 3397
-
AMEYA360设计方案丨通用无人机解决方案2018-10-25 1625
-
无人机电源系统设计方案探讨2018-10-09 3334
-
Ameya360 无人机视觉、高级传感与处理解决方案2018-04-23 3930
-
无人机侦测和反制系统2017-04-05 8602
-
无人机飞手紧缺 看无人机行业发展趋势如何?2016-06-28 4189
-
植保无人机供电系统解决方案2016-04-23 4973
-
无人机系统MUC技术方案集锦TOP62015-05-26 29347
-
无人机开发方案要领与电路图集锦2015-05-07 10469
-
无人机技术专题:让你了解最前端设计2015-04-28 9070
-
无人机系统发展趋势与解决方案最新集锦2015-04-24 3373
全部0条评论

快来发表一下你的评论吧 !
