

先进驾驶辅助系统方案设计与电路精华集锦
汽车电子
描述
由于甚至已经进入中低档汽车市场,先进驾驶辅助系统(ADAS) 是目前车辆行业中成长速度最快的应用领域之一。目前,众多特性能够警告驾驶员,使驾驶员更好地观察车外情况,并支持诸如泊车辅助和自适应巡航控制等功能—这些功能是通过基于雷达、摄像头、光探测与探距(LIDAR) 和超声波的系统来实现的。先进的ADAS 功能和自主驾驶确实需要将多种系统结合起来使用。TI 可提供模拟和数字解决方案,并制定了对此令人兴奋的应用领域的发展和成长提供支持的坚定路线图。
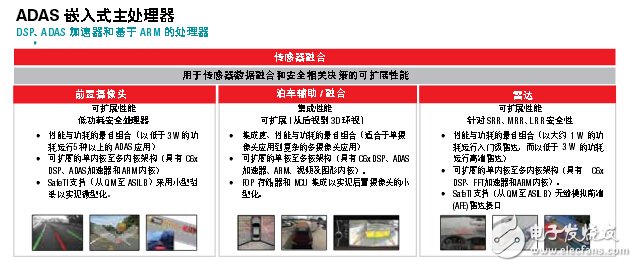
目前大多数先进驾驶辅助系统(ADAS) 功能基本上是其自有的独立系统,具有雷达、摄像头和超声波等最常用的传感器。随着技术的不断向前发展,TI发现,多个不同传感器输入的使用变得越来越普遍,这些输入被组合在一起,帮助作出更加准确的决策并识别危机情况。
视觉
• 不同ADAS系统中的强劲发展趋势增加了对新型、高级半导体组件的需求
• 数字信号通信取代模拟方案以提供更高的带宽和图像处理速度
• 总体解决方案尺寸和功率耗散对于缩减摄像模块尺寸至关紧要
• 降低线束的成本和重量并节约连接器的成本
• DSP 性能提升以运行多种更高性能的视觉算法
雷达
• 集成模拟前端、锁相环(PLL) 和合成器以及射频(RF) 组件,以缩减系统成本、功耗和板级空间
• 需要采用具有低抖动和低相位噪声的时钟、具有高达38 GHz 频率的压控振荡器(VCO)、具有10 GHz+频率的PLL 及具有波形发生功能的合成器,以实现所需的雷达系统性能
• 采用低噪声RF 电源以提升/实现雷达及模拟信号链路的性能
一般的ADAS需求
• 安全关键系统(例如自主刹车和转向)将需要符合ISO 26262认证
• 传感器融合(摄像头、雷达、超声波)以实现更高的系统性能(相比于独立系统)
• 更低的功耗
• 汽车安全性评价(NCAP、NHTSA)、政府强制性法令和消费者的安全意识推动了ADAS 市场的快速成长
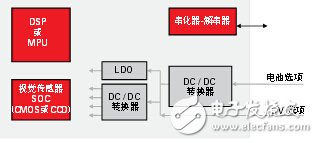
基于摄像头的系统概述
基于摄像头的系统的使用范围包括诸如从后备摄像头和环视系统等先进驾驶辅助系统(ADAS),到驾驶员瞌睡告警、车道偏离告警和碰撞避免。对来自CMOS摄像头传感器的图像进行处理并呈现给驾驶者或用于机器视觉。摄像头的复杂性和数量视具体应用而有所不同。
智能摄像头模块
智能型摄像模块应用于更加先进的后备摄像头及泊车辅助系统。
安全MCU 提供了一种基于ARM Cortex-R4F 的解决方案,并经认证适合在那些需要实现ISO26262 ASIL-D 安全等级的系统中使用。而且,这些MCU 还提供了集成型浮点、12 位ADC、CAN 和FlexRay 接口。HerculesTM安全MCU 还可被用来执行标量和矢量控制技术并支持众多的性能要求。
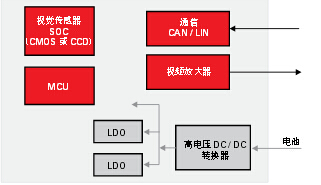
基础模拟头摄像模块
基础模拟摄像头模块用于后备摄像头和环视系统。多摄像头模块具有多个智能摄像头的摄像系统不仅能够提供环视功能,而且还能处理用于告警和为驾驶员提供额外信息的视频数据。
前置摄像头模块
对于那些需要进行大量用于机器视觉的数据处理的应用,摄像模块还内置了功能强大的DSP以处理视频数据。具体实例包括车道偏离告警、自适应前灯、交通信号识别和行人/目标探测。另一种用途将是盲点探测和驾驶者瞌睡告警。

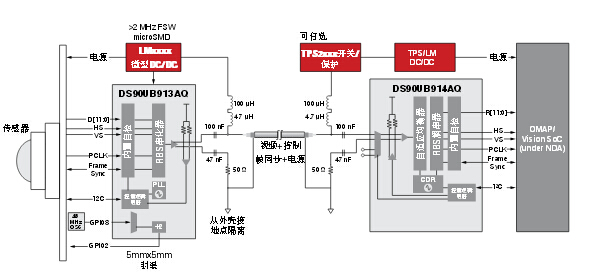
基于摄像头的系统
• DS90UB913A/914A串化器/解串器(SERDES)
• 支持百万像素图像传感器
• 无压缩的最佳图像质量
• 小型摄像头模块尺寸
无需微控制器
由一条线缆/一个连接器实现视频、控制和电源传输
ISP伴随芯片可被放置在远离ECU内摄像头的位置上
• 低成本
廉价同轴电缆
低组件数量
适合安装在一块印刷电路板(PCB) 上
• 小于15μs的极低延迟
• 支持同轴数据电缆供电
• 低功耗
面向最佳低光性能的更少散热
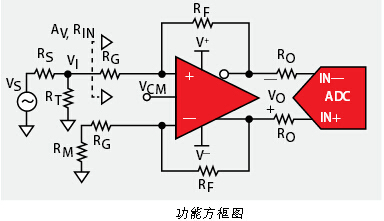
差分、高性能运算放大器
主要特点
• 370MHz 至3dB 带宽(VOUT= 0.5 VPP)
• 50MHz 0.1dB 带宽
• 2400V/μs 转换率
• 18ns 稳定时间(至0.05%)
• -94/-96dB HD2/HD3(5MHz时)
• LMH6551- Q1 符合AEC- Q100 1级规格要求,并采用了一种汽车级制造流程
应用
• 全差分视频驱动
• 通过双绞线传输视频信号
基于雷达的系统
随着成本的降低,雷达系统(比如说,用在盲点检测中)正在被安装在越来越多类型的车辆中。汽车雷达系统可被分为两大类:远程雷达系统和中程/近程雷达系统。远程雷达系统一般安装在车辆前部,侦测正前方。这些系统的测距离超过100米,通常用于自适应巡航控制、刹车辅助和碰撞告警。
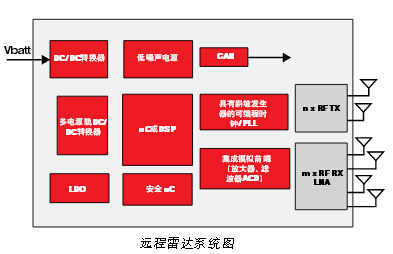
由于其较长的视线范围、较高的分辨率,以及识别和区分多种物体的能力,远程雷达系统要求DSP能够提供更多的处理能力,精确的信号调节,并且在很多情况下需要一个安全微控制器。随着诸如自适应巡航控制等应用开始接管车辆内的某些功能控制权(比如说加速器/刹车),它们就需要比盲点检测或侧面碰撞告警等单纯的告警功能更高的安全级别。
推动远程雷达系统开发的因素有:
• 减小系统尺寸
• 降低系统功率耗散(实现更小封装和更少的冷却要求)
• 低噪声性能组件和设计(针对高信号性能)
• 可实现更高分辨率和更佳物体检测/区分功能的天线设计
• 运行复杂软件算法的DSP在雷达能够影响车辆功能的系统中,安全性功能也很重要。
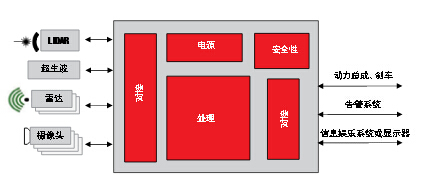
传感器融合
先进驾驶辅助系统(ADAS) 仍被视为单独的系统,彼此之间相互独立。每个系统有其自己的用途,或者显示信息,或者执行一项操作(比如说鸣响),而无需考虑任何其它ADAS系统。根据所采用的传感器技术类型的不同(雷达、摄像头、超声波、光照检测或测距),这样可实现特定的功能,但是却无法充分利用这个系统。为了制造完全自主的车辆,就需要将来自不同传感器的信息和数据组合在一起,充分利用它们的各自优势,并且弥补每个独立系统始终存在的不足。这被称为传感器融合。与多个、完全独立系统完全不同的是,不同的ADAS系统将它们的信息提供给一个中央传感器融合引擎控制单元(ECU),此单元能够将所有信息组合起来,使驾驶员能够更好地感知周遭环境。根据所选择的系统分区,原始数据(比如说未经压缩的视频)或预处理数据(例如来自雷达的目标数据)被提供给融合ECU。这对于融合ECU的处理能力需求,以及电源要求和与子系统(提供传感器数据的独立ADAS模块)连接的通信接口类型有巨大的影响。目前开发的大多数系统将集中和分散数据处理混合在一起。由于融合ECU对车辆和乘客安全的巨大影响,融合ECU应该通过ASIL认证。这不但会影响到ECU和系统设计,也会对IC选择造成影响。
-
求一种基于NXP的77G毫米波雷达之先进辅助驾驶解决方案2021-07-30 3538
-
求一种基于ZigBee的驾驶辅助系统解决方案2021-05-14 1504
-
图像传感器对先进驾驶辅助系统的重要性2020-08-04 2351
-
精品推荐:ADAS电路设计集锦,学一招受用十年!2020-06-03 2644
-
先进驾驶辅助系统的ASIL为什么很重要?2019-08-07 2912
-
可扩展图像传感器平台用于先进驾驶辅助系统和自动驾驶2018-10-11 3097
-
基于MOST的先进驾驶辅助系统解析2017-11-21 1338
-
我想做汽车辅助驾驶ADAS系统,求方案2017-09-12 4566
-
先进驾驶辅助(ADAS)解决方案2017-09-03 968
-
先进驾驶辅助ADAS方案2017-03-14 991
-
从先进驾驶辅助系统到无人驾驶2016-10-27 5424
-
实用电源电路精华集锦2012-08-20 179550
-
最受工程师喜爱的ARM设计方案精华集锦2012-08-13 9796
-
嵌入式电路图精华集锦2012-06-15 5001
全部0条评论

快来发表一下你的评论吧 !
