

直流无刷电机通过反电动势获取换相表方法
描述
一、分析前提条件
通过霍尔传感器进行电机的逆时针(CCW)/顺时针(CW)换相旋转,然后通过示波器进行波形抓取分析。
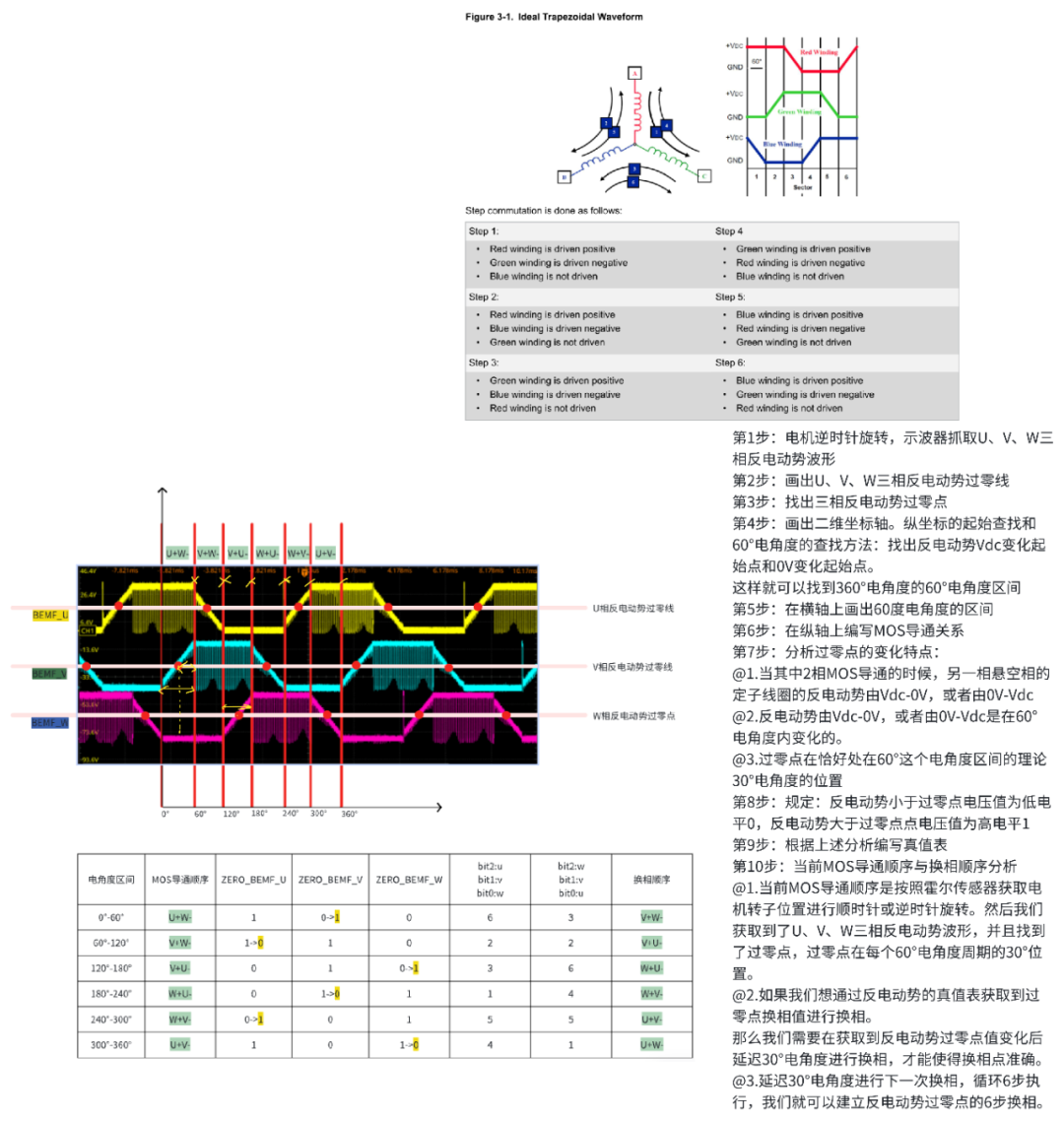
二、电机逆时针(CCW)旋转分析
6步换相表实现:
三、电机顺时针(CW)旋转分析
6步换相表实现:
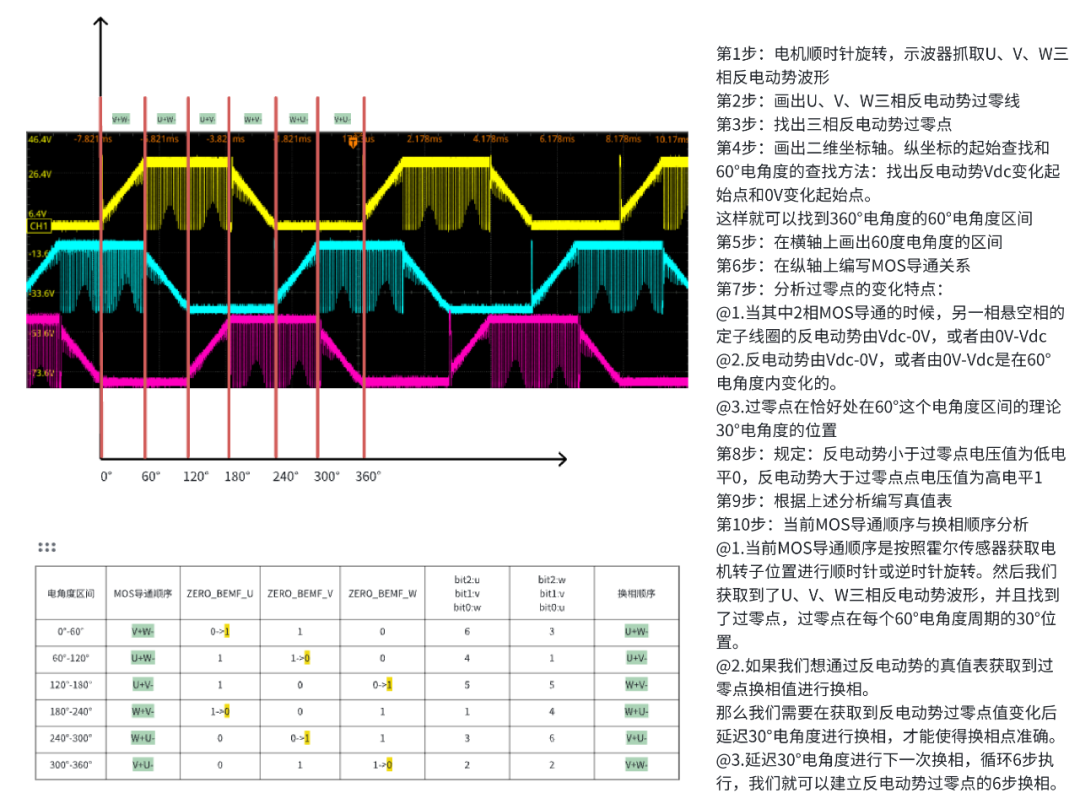
四、软件算法上需要做30度补偿原因分析
过零点是60度电角度周期内理论30°换相点
延迟30°电角度时间换相才是MOS的真实理论换相点
算法上做30°电角度补偿的目的是使得换相点更加准确,使得定子和转子位置始终维持60°-120°电角度区间。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于线反电动势的无刷直流电机无位置传感器控制2025-07-30 344
-
无刷电机改变反电动势波形的方法是什么2023-12-20 2466
-
请问反电动势无感无刷电机启动应该注意什么问题?2023-10-31 617
-
无刷直流电机无感控制仿真的反电动势法介绍2023-04-04 1681
-
如何去检测无刷电机的反电动势?有哪些方法?2021-07-26 5981
-
【原创】实际测量三相直流无刷电机反电动势波形2021-06-25 7221
-
【原创分享】实际测量三相直流无刷电机反电动势波形2021-06-21 20347
-
传统反电动势检测与换相控制检测电路优劣点比较分析2020-07-02 3736
-
请问BLDC无刷电机反电动势电路不加电容有什么检测方法?2019-06-28 3778
-
STM32 BLDC反电动势控制2018-05-04 6792
-
直流无刷电机直接反电动势检测2018-01-29 14566
全部0条评论

快来发表一下你的评论吧 !
