

超声波雷达在APA自动泊车功能中的应用与仿真
描述
作者 | 七七沫沫
小编 | 不吃猪头肉
自动泊车辅助系统(APA)是现代汽车智能驾驶技术的重要组成部分,该系统使得车辆能够在没有任何人为干预的情况下,自动完成泊车过程。具体来说,APA系统在泊车过程中通过布置在车辆周围的传感器(环视摄像头、超声波雷达等)完成对有效车位以及障碍物的感知识别,再进行泊车路径的规划、车辆运动的控制,从而完成泊车的工作。本文将重点介绍超声波雷达在APA自动泊车功能中的应用以及HiL测试环境中的仿真方法。 APA自动泊车中超声波雷达的应用
APA自动泊车中超声波雷达的应用
在自动泊车的应用场景中,一般需要在车辆周围布置12颗超声波雷达以完成全自动泊车的功能。相比于毫米波雷达或其他形式的雷达,超声波雷达具备制造成本低、安装方便、后期易维护等诸多优点。
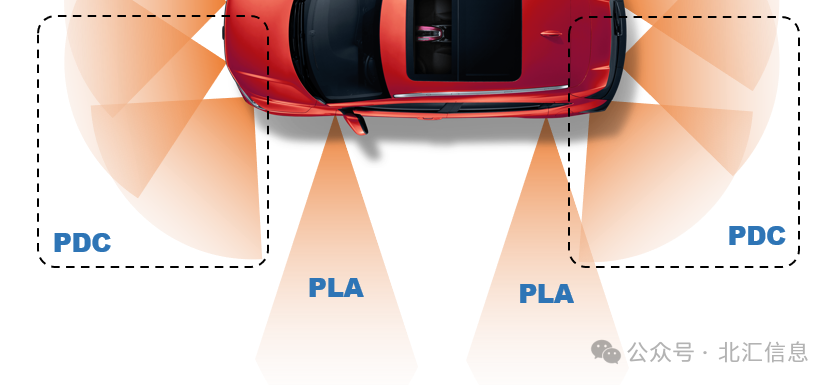
超声波雷达主要分为两种类型,一种是安装在前后保险杠用于检测障碍物的短距雷达,探测距离一般为15~250cm,这类传感器被称为PDC传感器。另一种安装在车辆侧面,用于探测停车位长度的传感器,探测距离一般为30~500cm,这类传感器被称为PLA传感器 。PDC和PLA主要的分布如下图所示。
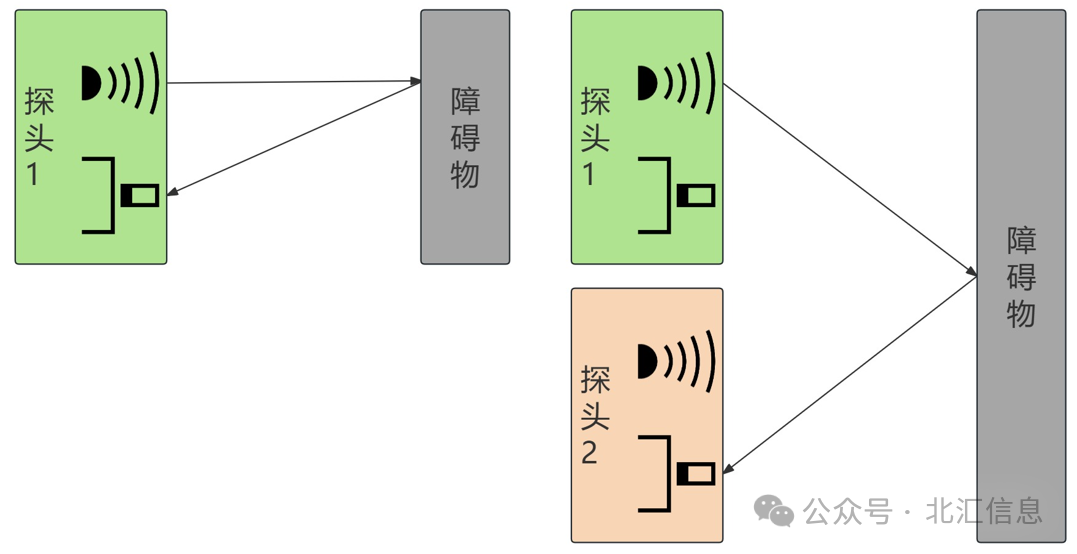
在实际的自动泊车应用场景中,超声波拥有多种工作模式,如自发自收(Direct Echoes)模式以及复杂的多发多收(Cross Echoes)工作模式。在自发自收的工作模式中,超声波雷达通过声波的飞行时间(TOF)即可计算车辆与障碍物之间的距离,这种模式原理相对简单,但不能获得障碍物的二维坐标,即无法获取障碍物相对于主车的空间位置。而多发多收的工作模式通过将多个超声波雷达作为声波的接收器,可以更好地获取障碍物相对于主车的空间位置,但是计算也将更为复杂。

超声波雷达测距原理及APA泊车流程
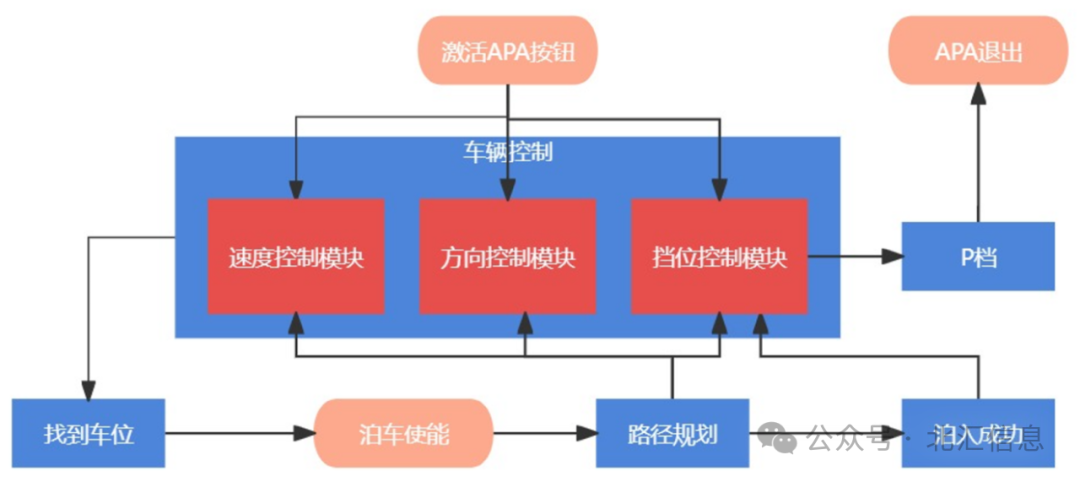
在车辆进行泊车时,超声波雷达可实时计算并输出车辆与周围障碍物的距离。控制器软件通过对超声波数据处理拟合出周围障碍物的轮廓、形状,相对位置等。以水平车位的泊车场景举例,驾驶员激活车辆APA自动泊车功能,车辆保持低速前进,结合超声波的感知融合数据,APA系统将识别可泊入的车位,驾驶员使能后,车辆将进入下一步路径规划、车辆控制等必要环节直到车辆泊入车位成功并退出APA自动泊车功能,如下图为整个APA自动泊车流程。

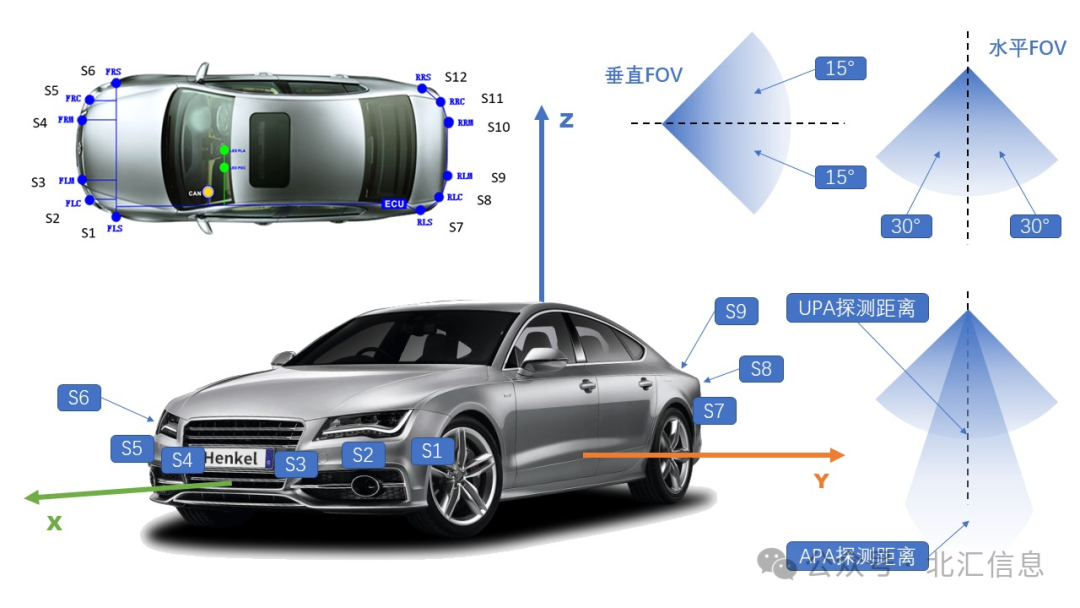
超声波雷达的基本仿真方法了解了超声波雷达的基本工作原理以及车辆布局后,需要关注的一些重要参数:
测量范围:超声波雷达最远探测距离;
FOV:超声波雷达水平视角范围,垂直视角范围。
雷达工作频率:工作频率对超声波的扩散、背景噪声、反射损失有影响,一般超声波雷达的工作频率在40kHz左右。
在HiL的仿真环境中,对超声波雷达的仿真需要借助专业的场景仿真软件(VTD)以及总线仿真实验管理软件(CANoe),在VTD中需要正确配置仿真的超声波雷达的各个参数,包括雷达的车辆安装位置、超声波雷达的最远探测距离、FOV视角等等。在总线仿真试验管理软件中需要明确超声波使用的通信协议、发送频率、波特率等。
整个的仿真链路中,VTD通过内置的完美传感器或其他精度更高的自定义开发模型将各个超声波雷达探测到的与障碍物最近的距离打包成UDP,发送至CANoe进行数据解析及总线仿真,如下图所示,VTD实时发送12组雷达输出的UDP数据,通过这种方式,可以有效简化传输链路,同时也能提高整个仿真的性能。当然,根据不同的仿真需求,可修改组包数据的结构,将障碍物的三维坐标、ID、属性等进行输出,通过获取不同的数据,结合CANoe可进行更多种类的APA自动泊车测试与验证。
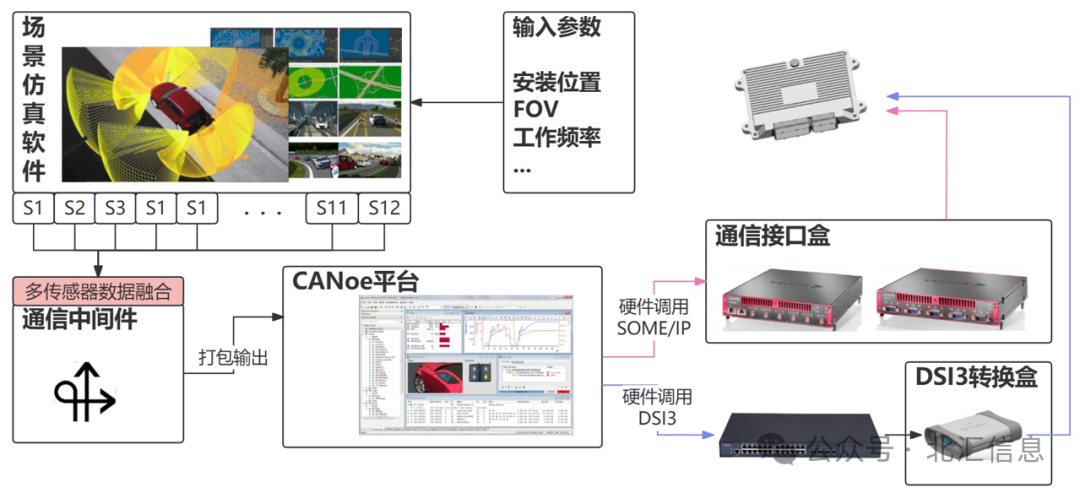
CANoe支持多种总线仿真能力,结合Vector硬件如VN1640、VN1670、VN5650及其他传感器通信设备,可以为控制器提供CAN/CAN FD、TCP/UDP、SOME/IP、DSI3等多种协议支持,同时软件提供VN硬件配置窗口,以便用户方便管理仿真系统中的VN接口盒。

北汇信息的APA仿真功能技术方案
北汇信息在已交付的项目中完成了多种超声波仿真测试方案的实施落地。针对SOME/IP、CAN/CAN FD总线的超声波雷达仿真,CANoe结合VN1670、VN5650或其他通信接口盒,可为控制器提供精度更高、报文发送周期更稳定、故障注入类型丰富的总线仿真平台。
DSI3总线协议具备主从式一对多的异步单线电流电压型通信、自动分配ID、异步通信、低成本、抗干扰强、支持多种数据格式传输等优点,非常适用汽车功能安全等应用场景。
通过CANoe与VTD联合后,将仿真的超声波探测的障碍物距离输出至CANoe,CANoe将距离数据处理成符合要求的飞行时间数据格式并发送至DSI3通信设备,DSI3通信设备通过信号转换,将仿真的超声波数据发送至被测控制器,完成控制器的12路超声波数据仿真。
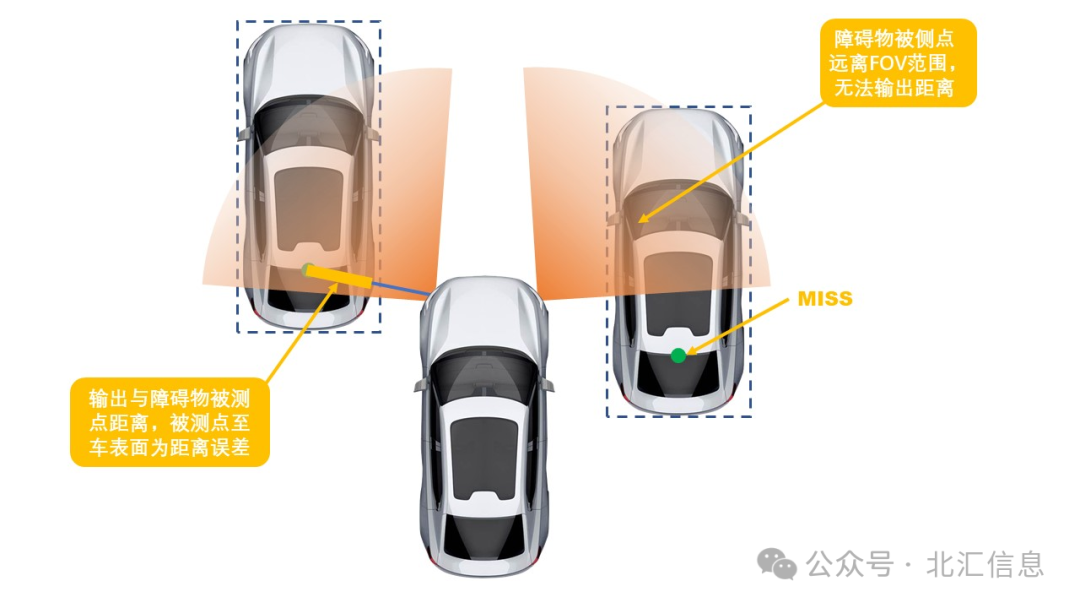
在VTD中使用完美传感器探测车辆周围障碍物的情况下,通常由于完美传感器障碍物检测特性,会存在一定的距离误差,完美传感器的仿真方案并不能对毫米级别的距离做出反应,为了弥补这部分的误差,需要做更多的额外算法来修正误差。这不仅占用了更多的计算资源,并且处理之后的结果也不一定能完美的修正误差。如下图。
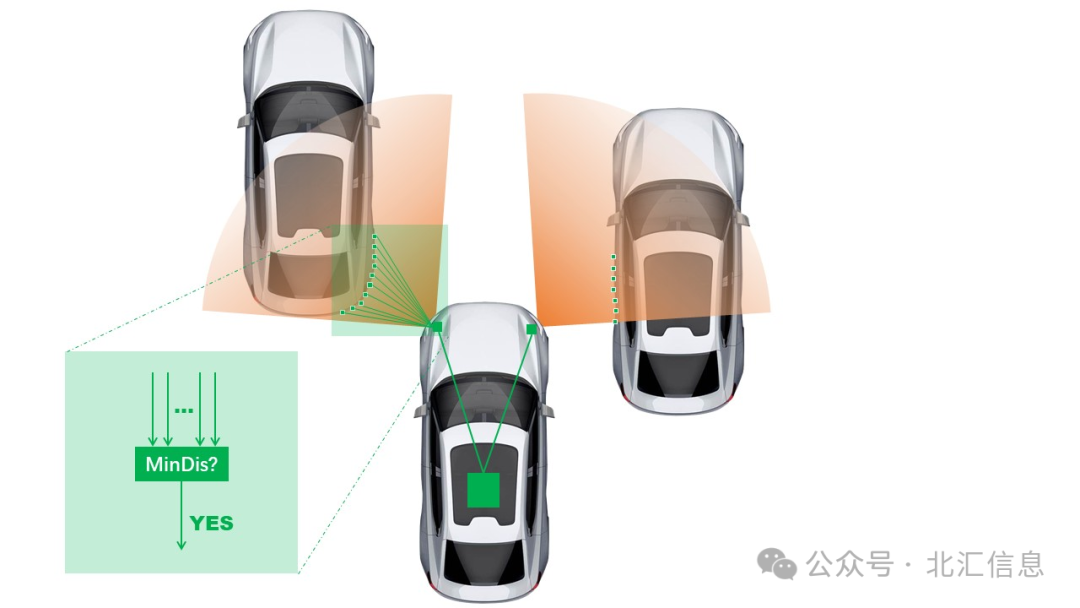
北汇信息为此提供了一套以光线追踪原理进行测距的超声波模型,相比使用12路的完美传感器,光线追踪的传感器模型能够提供毫米甚至微米级别的距离检测,并且将12路的传感器模型整合成一个光线追踪的超声波模型,极大地简化了工程的传感器布置,以及提高仿真的效率。模型的运行环境需要 NVIDIA CUDA环境的支持,支持配置超声波雷达的最远探测距离、FOV、安装位置等等,仿真频率等,如下为光线追踪原理图。

总结
APA自动泊车功能作为智能驾驶中重要的一环,在应对日益错综复杂的泊车环境时, HiL测试可以通过虚拟化仿真手段,加速APA功能开发及测试验证,减少APA实车测试验证成本,可通过搭建更多复杂、丰富的泊车场景来验证APA功能的测试覆盖度。
北汇信息在智能驾驶MiL/SiL/HiL/ViL测试中拥有诸多成功的方案与实施经验,在持续的项目开发中,北汇信息也致力于新方案的技术验证与实施,为中国智能网联汽车发展贡献自己的力量。
-
自动泊车领域传感器——超声波雷达2018-10-10 22434
-
在自动泊车应用中,雷达为什么优于超声波2022-03-10 3948
-
用于自动泊车的超声波泊车传感器2023-08-23 2465
-
超声波测距换能器:工业与生活中的测量利器2025-07-02 3054
-
超声波传感器在指导汽车安全驾驶中的应用2017-10-31 3661
-
proteus仿真超声波倒车雷达2018-08-24 6709
-
毫米波雷达VS激光雷达VS超声波雷达2019-09-19 21289
-
固定阈值在超声波测距车载应用中的使用2012-09-06 5323
-
自动驾驶技术的传感器超声波雷达的详细介绍和应用的资料概述2018-07-03 19869
-
助力ADAS的眼睛:超声波雷达系统2019-02-02 7860
-
超声波雷达的工作原理及技术现状解析2023-04-23 10421
-
低功耗毫米波雷达在泊车辅助应用中优于超声波的原因2023-11-22 1124
-
自动驾驶感知层的超声波雷达和毫米波雷达2024-04-02 3433
-
TDA4泊车应用中的超声波雷达集成方案2024-09-27 868
-
超声波倒车雷达工程仿真资料2025-06-08 526
全部0条评论

快来发表一下你的评论吧 !
