

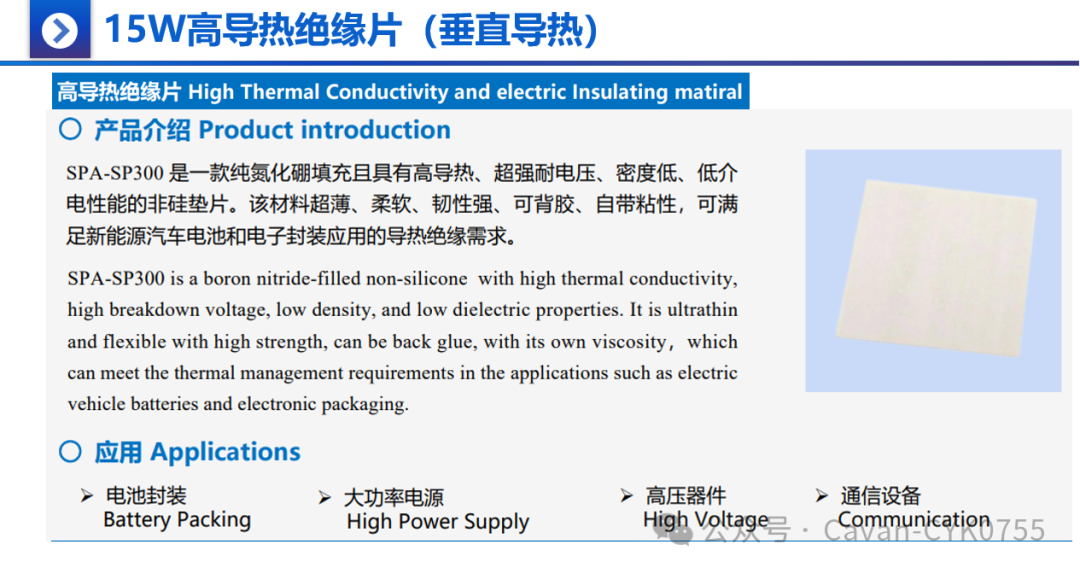
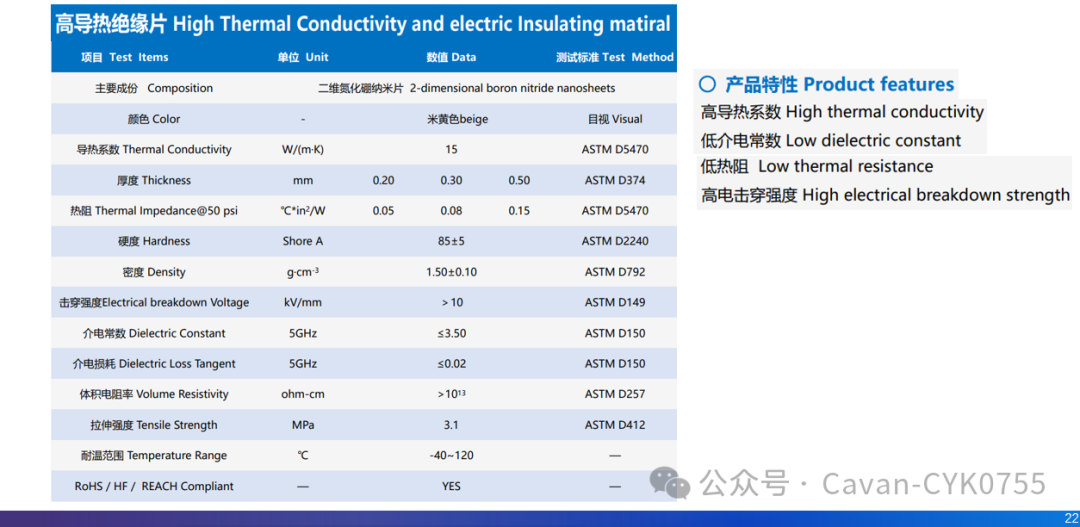
自动驾驶雷达15W高导热绝缘片
描述
历史不成熟的经验表明:技术路线的收敛,往往是新技术大规模落地的标志。按照这种经验审视自动驾驶技术,会遗憾地得出自动驾驶落地还遥遥无期的悲观结论,毕竟自动驾驶一是不缺自信、二不缺技术路线之争。技术路线之争往大了看有单车智能和车路协同之争、有纯视觉和多传感器融合之争、有依赖高精地图和不依赖高精地图之争……,往小了看有激光雷达布置位置之争、有行泊一体和分立之争……
在所有技术路线之争中,如果要挑一个我心中最有意思和最热闹的,非激光雷达莫属,不信你看:
(1)测距方法有飞行时间(Time of Fly,ToF)法和调频连续波(Frequency Modulated Continuous Wave,FMCW)法之争;
(2)激光器有边缘发射激光器(Edge Emitting Laser,EEL)和垂直腔面发射激光器(Vertical Cavity Surface Emitting Laser,VSCEL)之争;
(3)激光波长有905nm和1550nm之争;
(4)探测器有雪崩光电二极管(Avalanche photodiode,APD)、单光子雪崩二极管(Single photon avalanche diode,SPAD)、硅光电二极管(Silicon photomultipliers, SiPMs)之争;
(5)扫描模块有机械式、混合固态、固态之争;混合固态又有棱镜、转镜和微机电系统(Micro-Electro-Mechanical System,MEMS)微振镜之争,固态有光学相控阵(Optical Phased Array,OPA)和Flash之争。
如果单纯地将不同技术路线进行排列组合,理论上可以有上百种组合,如图1所示,这也意味着将有上百种类型激光雷达。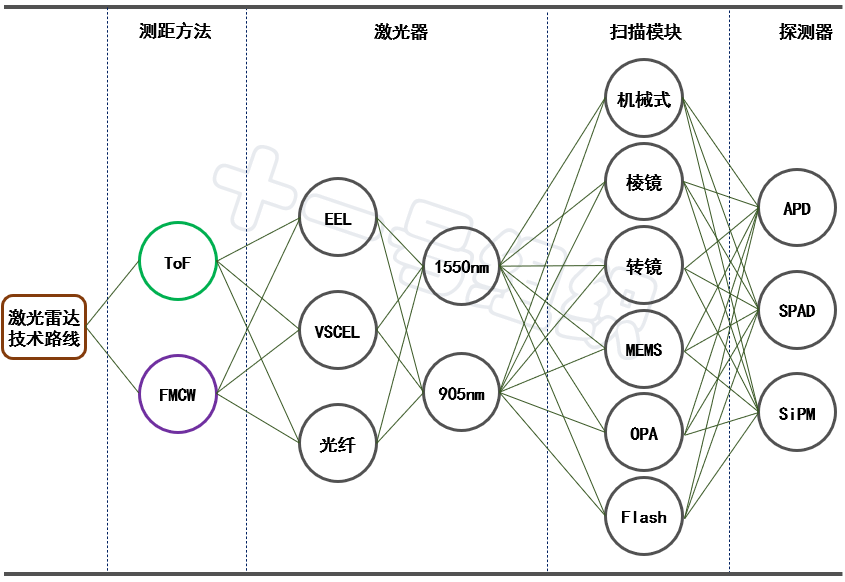 图1 激光雷达纷繁复杂的技术路线组合但很明显,图1中不是所有连线都具有可行性。而本系列科普文章,就是想讲明白哪些技术路线不合理,哪些技术路线是已经被淘汰,哪些技术路线正在被广泛使用,哪些技术路线是未来的发展方向。
图1 激光雷达纷繁复杂的技术路线组合但很明显,图1中不是所有连线都具有可行性。而本系列科普文章,就是想讲明白哪些技术路线不合理,哪些技术路线是已经被淘汰,哪些技术路线正在被广泛使用,哪些技术路线是未来的发展方向。
在大规模枯燥的科普知识之前,第一篇就让我们从紧张刺激而又跌宕起伏的激光雷达发展历史讲起。
01 跌宕起伏的历史
早在二十世纪六十年代,休斯实验室的Maiman和Lamb就研制出了可以发出694.3nm红色激光的红宝石激光器,这是公认的世界上第一台激光器。为什么叫红宝石呢,因为该激光器的工作物质就是掺有铬和铝的红宝石。
此后随着激光技术的发展,使用激光进行探测的激光雷达也得到发展,不过那时还主要用于科研领域,比如用于气象探测,比如用于对海洋、森林、地表的地形测绘,和一般人还没什么交集。
到了二十世纪八十年代,激光雷达引入了扫描结构,视场角增大之后也让其在部分商用领域找到了立足之地,比如工业测量,著名的Sick(西克)及 Hokuyo(北洋)公司针对此领域推出的扫描式2D激光雷达便是其中的优秀代表。
2000年以后,激光雷达由单线扫描又进化到多线扫描,并逐渐在环境三维高精度重建应用上展露出一些优势。
2004年,这是激光雷达种子在自动驾驶领域种下的年份,美国第一届无人车挑战赛在“别人恐惧我贪婪”的DARPA资助下如期举行,参赛队伍里有一家名叫Velodyne的公司,这是一个生产音响设备的公司,创始人为David Hall博士。
据说Velodyne参加比赛是为了推销自家的音响产品,不信你看它的队名DAD(Digital Audio Drive,数字音频驱动),不看解释我还以为他叫“爹地队”,是我肤浅了。Veloyne参加比赛的车辆是一辆被改装了的带有全景摄像头的皮卡,如图2所示。
Velodyne虽然最后没有完成比赛,但David Hall博士在比赛中发现了一个新奇的玩意:单线激光雷达,得知这个玩意的工作原理之后,David Hall博士随机感受到这玩意的巨大魅力,同时也看到了单线激光雷达的局限性,比完赛回来之后马不停蹄地就投入到激光雷达的研究中。
2005年,第二届无人车挑战赛上,Velodyne在参赛车辆上装了一个自家发明的360°多线束旋转式激光雷达,这台激光雷达直径达30英寸,重达100磅,实实在在的一个大家伙,“花盆”的外号也因此由来。
虽然依旧没有完成比赛,但这颗车顶的激光雷达引起了其他队伍的浓厚兴趣。比赛之后,Velodyne继续与这些参赛队伍保持联系,并基于这些需求不断优化自己的激光雷达产品。
2007年,第三届无人车挑战赛移步城市举行,Velodyne虽然没有参加比赛,但是在7支跑完了全程的队伍中,有6支搭载了Velodyne的64线束激光雷达HDL-64,Velodyne激光雷达自此一战成名。
比赛结束后,版权保护意思强烈的David Hall博士随即将这项新发明申请了专利,并授权给了Velodyne公司,专利号为US7969558(High definition LiDAR System),业内称为“558专利”。
2011年6月,该专利又获得美国专利审判和上诉委员会(Patent Trial and Appeal Board,PTAB)的授权,这意味着“558专利”成为机械旋转式激光雷达的基础专利,成为其他研发机械旋转式激光雷达绕不过去的坎,这也成为后续众多江湖恩怨的起源。
继续回到DARPA资助的无人车挑战赛上,当时低调亮相的另外一家激光雷达鼻祖便是Ibeo。1998年成立的Ibeo,2年后被SICK收购。第三届DARPA资助的无人车挑战赛上,Ibeo都有给部分参赛队伍提供单线扫描式激光雷达。
尤其是在2005年第二届无人车挑战赛上,斯坦福团队通过在感知方案中加入5个Ibeo激光雷达,成功在那一年的挑战赛中脱颖而出,参赛车辆如图3所示。我有点理解Velodyne的David Hall博士为什么要做多线激光雷达了,5个单线激光雷达并排放着确实有点壮观。
2009年是两家激光雷达鼻祖光辉岁月的开年。
这一年,Ibeo从SICK重新获得独立运营权,好运也随之到来。2010年,获得了法雷奥的青睐,双方将合作共同为奥迪L3自动驾驶项目开发车载激光雷达,项目总额达到10亿美金。
这一年,Velodyne推出64线旋转式激光雷达的改进版HDL-64E,随着投入到无人驾驶领域研究的公司越来越多,HDL-64E可谓一机难求,遍寻宇宙无敌手,8万美金一颗的价值就正面说明了市场的火爆,图4为搭载在Voyage车上的HDL-64E。
2009年之后,Velodyne在自动驾驶领域叱咤风云、为虎作伥,Ibeo在乘用车前装量产领域呕心沥血、潜心打磨。
花开两朵,各表一枝,先来说说Ibeo。
经过7年研发和量产打磨,2017年,其为奥迪A8打造的全球第一款车规级激光雷达SCALA量产交付,该款4线激光雷达扫描系统采用一维转镜方案,水平视场角达到了145°,测距达到了150m,图5为搭载SCALA奥迪A8。本以为这将是Ibeo的腾飞时刻,未曾想,奥迪临门刹车,叫停了带L3自动驾驶功能的A8量产。
虽然遭受了客户奥迪的爽约,合作伙伴法雷奥的移情别恋,Ibeo非但没有就此沉沦,反而极大激发了自己的斗志,特别是在采埃孚入股Ibeo之后,更是开足马力投入了固态激光雷达的研发中,以期证明自己,这种对技术的执着实在是令人钦佩。
这种执着在2019年换来了回报,前脚刚一口气发布了短、中、长距三款纯固态激光雷达产品ibeoNEXT,后脚就被东方大国神秘的客户长城汽车看中,随机宣布与其达成战略合作,ibeoNEXT将搭载在长城魏牌系列车型,并定于2021年投产。
ibeoNEXT长距产品采用885nm波长激光器,拥有11.2°x5.6°的视场角,140m的探测能力。这个参数属实有点尴尬,目前主机厂对主激光雷达的视场角要求一般是120°x25°,所以要用ibeoNEXT长距款作为主激光,需要11个拼起来……,造型上得有多丑,造型设计部门得有多头大。
难怪有业内专家说:落地是不可能的,只是一个噱头。所以这个合作的结局早已注定,只是没想到这么悲壮。
计划搭载IbeoNEXT的长城魏牌摩卡车型经历了延迟、延迟、再延迟……。2022年8月,成都车展上,长城魏牌终于官宣了旗下首款激光雷达车型:摩卡DHT-PHEV激光雷达版,但为其站台的激光雷达厂商却不是Ibeo,而换成了速腾聚创。2022年9月,我们也没有等来ibeoNEXT量产的喜讯,却等来Ibeo破产的消息。
一代激光雷达佳人消香玉损,世人在评价她时,总是指责其在技术上步子卖的太大,融资和客户上又不够用心。但我总觉得这符合西方创业公司的传统,认准一项技术,死磕,垄断世界、惊艳世人。
Ibeo只是破产,又不是原地毁灭,这个时候说不定哪家公司正在继承Ibeo的衣钵,正在潜心研究固态激光雷达,以期一鸣惊人。
到了另一朵花,Velodyne。
2009年之后,自动驾驶赛道的火热将Velodyne推上激光雷达铁王座,虽然8万美金一颗、虽然售后服务几近于无,虽然供货周期漫长,但奈何市场别无其他激光雷达可选。2016年,为了能够享受到优先提货权,福特和百度更是向Velodyne激光雷达公司联合投资了1.5亿美元。
时人常戏称:能有多少自动驾驶车辆上路,就看Velodyne能生产多少激光雷达。
这种躺赢的局面持续到了2017年,如果从2007年第三届无人车挑战赛算起,整整躺赢了10年。后面的故事大家就比较熟悉一点,以禾赛科技和速腾聚创为首的国内激光雷达厂商开始入局,其产品以极高的性价比、贴心的售后服务及极友善的交付周期迅速圈粉无数。
2019年8月,感受到国内厂商威胁的Velodyne祭起了大杀器“558专利”,在美国加州起诉了禾赛科技和速腾聚创两家中国公司侵权。
刚发起专利诉讼没多久,2019年底,想要将主要精力放在欧美市场的Veodyne突然决定不直接在中国市场销售激光雷达,而是通过代理模式发展,同时裁掉了大部分在中国的工作人员。未曾想,战略放弃的中国市场在两年后成为激光雷达最核心的战场。
2020年6月和9月,禾赛科技和速腾聚创先后跟Velodyne达成了和解,并签署了专利许可协议。两家公司同意向Velodyne支付和解费用,包括一次性的专利许可补偿及后续按年支付的专利许可使用费。
之后的两年,用内忧外患形容Velodyne毫不为过,曾经引以为傲的机械式激光雷达市场迅速缩水,2020年推出的混合固态激光雷达又没激起水花。覆巢之下安有完卵,2021年,David Hall博士和其妻子因“表现不当且缺乏诚信”被罢免职务。
终局就是2023年开年,Velodyne宣布与Ouster公司合并,合并后公司仍以Ouster命名,股票代码也是OUST,一代激光雷达巨头,真的是挥一挥衣袖,不带走一个名字。
在激光雷达的发展史上,还有许多发挥重要作用的人物和公司,在此我们就不展开叙述,只是通过Velodyne和Ibeo两家公司波澜壮阔的发展历史来回顾激光雷达的青葱岁月。
02 激光器之争
在激光雷达名称的四个字中,激光占据了一半的分量,这足以说明其“家庭地位”。
究竟什么是激光、发射激光的激光器有哪些类型,激光器有哪些重要的参数,本文期望能够说清一二。
一、激光的诞生
激光Laser的英文全称为Light Amplification by Stimulated Emission of Radiation,直译过来就是受激辐射光放大,听起来有点别扭,但其实精确表达了激光产生的原理,而要讲清这个原理,就不得不从物资原子结构聊起。
19世纪末,科学家通过一系列粒子撞击试验后发现:原子是由原子核和绕核运动的电子组成,电子围绕原子核不停地旋转,同时原子核也不停地自转,原子核内部还可以细分为质子和中子,原子内部结构如图6所示。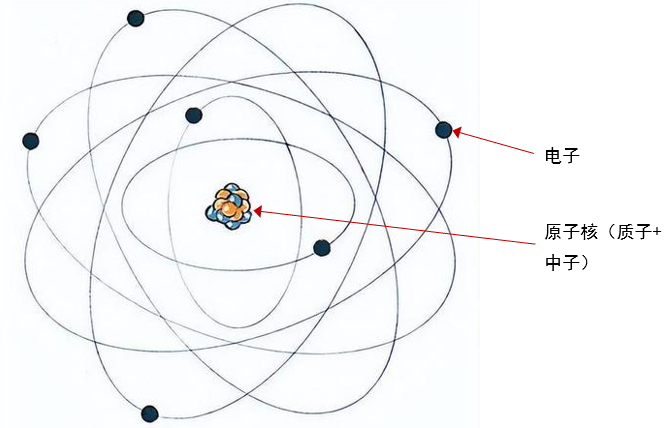 图6 原子内部结构
图6 原子内部结构
1913年,年仅28岁的丹麦物理学家波尔(Niels Bohr)在借鉴了普朗克(Max Planck)的量子理论基础上提出了全新的原子结构模型,其基本假设主要包括:
(1)定态假设:电子在原子核库仑力作用下,只会在一些分立的特定圆形轨道运动,且不向外辐射光子,处于稳定的状态,这种状态被称为定态。
注:光子(Photon)是一种基本粒子,是电磁辐射的量子,其静止质量为零,不带电荷,其能量E为普朗克常h和电磁辐射频率f的乘积:E=hf,在真空中以光速运行。
(2)轨道假设:电子在不同的轨道上运动,能量是不同的,能量相对较高的为高能态,相对较低的为低能态。当电子处于离核最近的轨道上时,能量最低,称为基态,当电子处于其他轨道上时,都比基态能量高,称为激发态。
(3)跃迁假设:在不同定态之间跃迁,会辐射或吸收一定频率的光子,辐射或吸收光子的能量由这两个定态的能量差决定。
原子中处于高能态的电子,在没有任何外界光子作用下,有一定概率会自发地从高能态向低能态跃迁,损失的能量会以光子的形式辐射出来,这个过程称之为自发辐射,如图7所示。
 图7 自发辐射过程
图7 自发辐射过程
不同原子自发辐射产生的光子在频率、相位、偏振方向及传播方向上具有随机性。白炽灯的工作原理就是基于自发辐射,通电后白炽灯灯丝中高能态电子数增多,频繁地发生自发辐射产生大量光子。
原子中处于低能态的电子,也不是吃素的,随时在观察身边是不是有外来光子经过,一旦有能量恰好等于两个能级之间能量差(E2-E1)的光子出现时,就会启动“吸星大法”,将光子的能量吸收过来,用来将自己提升到高能态,这一过程称为受激吸收,如图8所示。
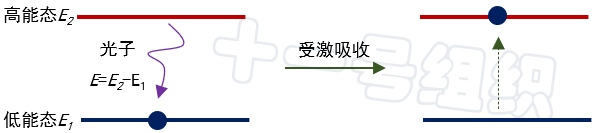 图8 受激吸收过程
图8 受激吸收过程
原子中处于高能态的电子,在见到上述外来光子时,也不会无动于衷,并且在辐射场能量够大后,自己将向低能态跃迁并辐射出一个和外来光子具有相同频率、相位、偏振方向及传播方向的光子,听起来有点像私奔,这个过程称之为受激辐射,如图9所示。
 图9 受激辐射过程
图9 受激辐射过程
这样,通过一次受激辐射,一个光子变为两个相同的光子,这意味着光被放大了。到此为止,激光的直译解释中(受激辐射光放大)七个字已经悉数有序登场,但此时的光还不能称为激光。
首先,自然条件下,原子中处于高能态的电子数目总是比低能态的电子数目少,所以外来光子经过,你很难保证是被低能态电子吸收发生受激吸收,还是被高能态电子看上,发生受激辐射。如果想要原子内部产生更多的受激辐射过程,就需要外界提供能量打破热平衡,从而使高能态和低能态电子数出现反转。
为了实现这个过程,一是需要采用容易发生高低能态电子数反转现象的工作物质,这种物质被称为增益介质。二是需要对增益介质进行激励并提供让增益介质不断发生粒子数反转的能量源,被称为泵浦源。增益介质在泵浦源的激励下,发生粒子数反转,这是激光产生的前提条件。
其次,处于高能态电子也会发生自发辐射,更何况之前已经通过泵浦源人为的将低能态电子拉升到了高能态,这种自发辐射过程在没有人为干预情况下会更加强烈,因此我们要想办法让受激辐射远大于自发辐射,说白了就是要让增益大于损耗。
办法之一就是在增益介质前后两端加上两个反射镜,其中一端是全反射镜,另一端是部分反射镜,这一结构被称为谐振腔。当受激辐射发生后,方向合适的光子会在两个反射镜之间反复横跳,多次经过增益介质,使增益介质内部反复产生受激辐射,如图10所示。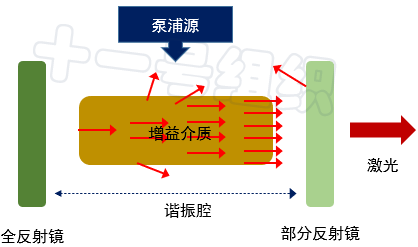 图10 激光器内部光学系统组成
图10 激光器内部光学系统组成
当光束放大到可以穿透部分反射镜的阈值时,会从部分反射镜中透射出来,形成激光束。由于两面反射镜位于特定的方向,对于方向不合适的受激辐射光会被滤除。同时两镜面之间的距离也对输出的激光波长有着选择作用,只有在两镜间的距离能产生共振的波长才能产生激光。
因此我们看到穿透部分反射镜的激光束波长一致、方向一致、波束极窄,这也是谐振腔筛选的结果。
至此,一束激光算是真正诞生了。
二、激光器
增益介质、泵浦源和谐振腔是激光诞生所需要的主要光学系统,如果再辅以电源系统、控制系统和机械机构等,就可以组成一个利用受激辐射原理产生激光的完整激光器。
增益介质是光子产生的源泉,基于这个维度,激光器可分为气体、液体、固体三种类型,固体类型激光器又可细分为固体、光纤、混合、半导体等类型,如图11所示。应用在汽车领域的激光雷达,以半导体激光器和光纤激光器为主,下文我们对这两类激光器展开介绍。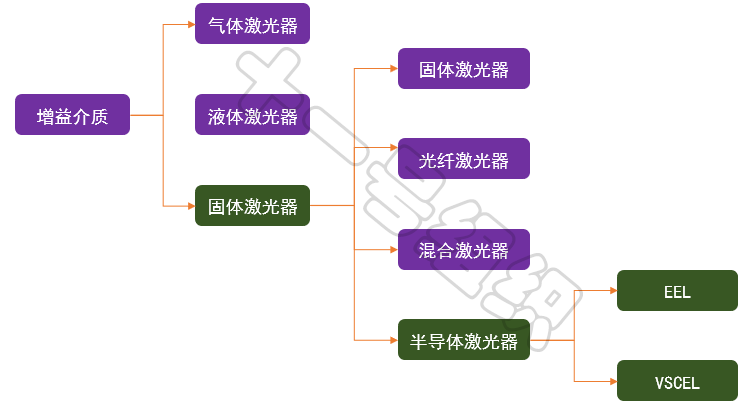 图11 激光器的分类
图11 激光器的分类
(1)半导体激光器
半导体激光器的前缀是半导体,所以要介绍清楚,不得不从半导体最基础的PN结说起。
P型半导体是通过在纯净半导体(不含杂质且无晶格缺陷的半导体)中掺杂特定杂质,让空穴(相当于带正电的粒子)数量增多。N型半导体也是如此操作,只是掺杂的杂质让电子(带负电的粒子)数量增多。空穴和电子被称为载流子。
如果将P型半导体和N型半导体制作在同一块半导体基片(硅或锗)上,一方面由于浓度差,P型区多子(空穴)会向N型区扩散,而N型区多子(电子)会向P型区扩散,形成载流子扩散运动。另一方面,滞留的带电离子(P区失去空穴产生负离子区,N区失去电子产生正离子区)形成的内电场,驱动P(N)型区的少子向低电势移动,形成反向的漂移运动,如图12所示。
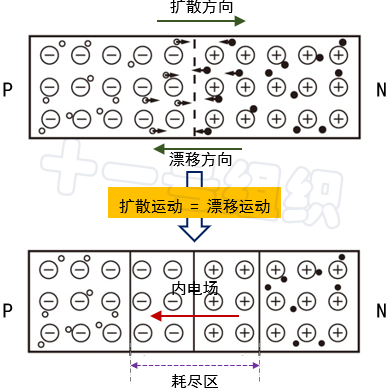 图12 PN结的形成
图12 PN结的形成
当扩散运动和漂移运动所迁移的载流子数目相同时,达到动态平衡,就形成一个PN结。PN结中载流子数量非常少的一个高电阻区域称为耗尽区。
如果给PN结施加一个正向电压(P型区接正极,N型区接负极),正向电压的电场与PN结的自建电场方向相反,它削弱了自建电场对扩散运动的阻碍作用。在外电场作用下,大量电子将被推向N区,其中一部分与空间电荷区正离子附近的空穴复合。大量空穴也会被推向P区,其中一部分与空间电荷区负离子附近的电子复合。载流子复合过程将会发射某种波长的光子,也就是发生了自发辐射。
随着正向电压上升,流经PN结的电流大于一个阈值时,自发辐射产生的光子通过半导体内已激发的电子-空穴对附近时,就能激励二者复合再产生一个新的光子,也就是发生了受激辐射,再加上谐振腔的反射,就能通过受激辐射加速光子的产生,从而产生激光。
但是要注意的是,并非所有半导体材料PN结发生载流子复合时都会产生光,有的半导体材料会将部分能量转化为热耗散掉而不产生光,这就会导致发光效率的降低,因此为了提高发光效率,通常使用带隙半导体作为发光材料,例如砷化镓(GaAs)、磷化铟(InP)等。
总结一下:半导体激光器就是指使用半导体材料作为增益介质,采用半导体工艺在半导体材料中构造出大量PN结,在泵浦源的激励下,PN结区域发生载流子复合从而发生受激辐射,受激辐射产生的光子在谐振腔的作用下最终生成一束激光。
半导体激光器使用的泵浦源主要有三种方式:电激励、电子束激励,光激励和碰撞电离激励等。绝大多数半导体激光器采用的是电激励,即给PN结加正向电压,以使在结平面区域产生受激辐射,也就是说是个正向偏置的二极管,因此半导体激光器又称为激光二极管。
半导体激光器具有效率高、体积小、寿命长、低能耗等优点,成为现代激光技术发展的重要基础,具有战略性的发展意义。其根据谐振腔制造工艺的不同可分为边缘发射激光器(Edge Emitting Laser,EEL)和垂直腔面发射激光器(Vertical Cavity Surface Emitting Laser,VCSEL)两种。
EEL是在芯片的两侧镀光学膜形成谐振腔,由于谐振腔与衬底(晶圆片)平行,因此EEL沿平行于衬底表面发射激光。
VCSEL是在芯片的上下两面镀光学膜,形成谐振腔,由于谐振腔与衬底垂直,能够实现垂直于芯片表面发射激光。
EEL和VCSEL的结构对比如图13所示。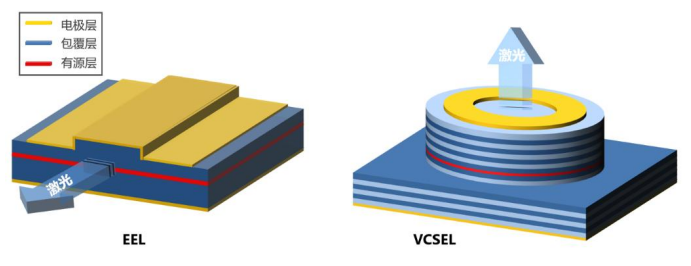 图13 EEL和VCSEL的结构对比
图13 EEL和VCSEL的结构对比
以VCSEL为例,详细介绍一下半导体激光器内部结构,VCSEL典型结构剖面如图14所示,从上往下依次为P型接触电极、上反射镜、上氧化限制层、有源区、下氧化限制层、下反射镜、衬底及N型接触电极。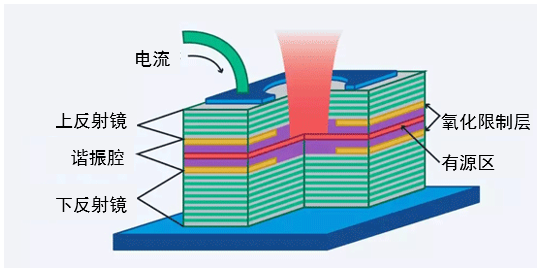 图14 VCSEL典型结构
图14 VCSEL典型结构
有源层通常由3~5个量子阱(一种薄层结构,可以在垂直于薄层表面的方向上限制粒子)组成。有源区的两侧是氧化限制层,一方面起着限制载流子的作用,另一方面起着调节谐振腔长度的作用,使其谐振波长正好是所需要的激光波长。
限制层两侧是上下反射镜,通常采用N型和P型布拉格光栅(N-DBR/P-DBR)作为谐振器反射镜。N-DBR在下方作为全反射镜,反射率接近99.9%。P-DBR在上方作为部分反射镜,反射率也大于99%。
在衬底(N型砷化镓材料)和P-DBR的外表面制作接触电极,形成欧姆接触,并在P-DBR上制成一个圆形光窗口,获得圆形光束,窗口直径从几微米可到百微米量级。
工作时,电流从P型电极注入,通过氧化层注入到有源区,会在有源区形成受激辐射实现激光输出。激光的输出方向垂直于有源区表面,穿过限制层表面,从低反射率的P-DBR反射镜射出,最终稳定输出激光。
EEL和VCSEL的主要性能差异体现在功率密度、温漂系数、光束质量、光谱宽度和生产成本等方面,汇总如表1所示。
表1 EEL和VCSEL主要性能参数对比
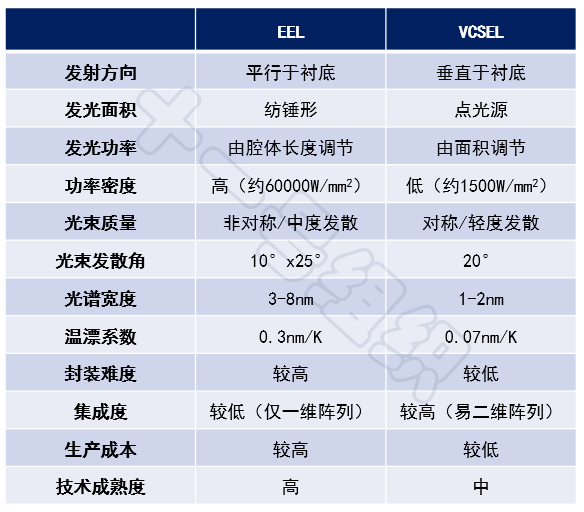
(a)功率密度。在激光领域,功率密度表示单位时间内,激光辐照在单位面积靶材上的能量大小,单位为W/mm^2。在其他条件相同的情况下,功率密度低意味着从被测物体表面反射回来的入射光功率低,这将导致探测距离短。
EEL的光功率密度一般是60000W/mm^2左右,而现在头部厂商生产的五结VCSEL功率密度也只有1500W/mm^2左右,相差一个数量级。
(b)光束发散角。激光器发射出去的激光具有一定的发散角,发散角直接决定激光打到被测物体表面的光斑面积,从而影响了激光打在被测物体上的光功率密度,最终影响从被测物体表面反射回探测器表面的入射光功率。在其他条件相同的条件下,若发散角减小50%,则激光雷达探测距离将提升41%。
VCSEL打在物体上的光斑呈点圆形,远场发散角典型值在20°左右。EEL打在物体上的光斑呈椭圆形,慢轴远场发散角典型值在20°左右,远场发散角典型值在30°左右,因此VCSEL具有相对较小的远场发散角,如图15所示。
这样的发散角大小其实都是不可接受的,都需要准直镜和扩束镜,来减小激光的发散角。
(c)光谱宽度。由于滤光片在接收激光时需要过滤掉特定波长(905 nm/1550 nm)以外的光,因此光谱宽度越窄意味着激光的抗干扰性越强,信噪比也就越高。目前VCSEL激光器的光谱宽度在1~2 nm左右,低于EEL的3~8 nm,拥有较强的抗干扰性。
(d)温漂系数。温漂是指激光波长随温度变化发生偏移的现象,偏移过大会导致回波信号被滤光片滤掉,无法被探测器接收到。当然也可以提高滤光片的光谱宽度,但这会导致信噪比减少,抗干扰能力减弱。目前VCSEL的温漂大约是EEL的六分之一。
(e)生产成本。EEL是平行于衬底侧面发光,所以在形成晶圆后还需要进行切割、翻转、镀膜、再切割的工艺步骤,无法按照现有半导体工艺来一次性处理,生产成本较高。VCSEL垂直于衬底正面发光,不需要在侧面进行太多加工,只需要按照正常的半导体加工工艺批量处理即可,成本较低。按照Yole的统计,EEL的后道处理工序成本比VCSEL高了一倍以上。
(2)光纤激光器
光纤激光器和半导体激光器一样,都是由能产生光子的增益介质,对增益介质进行激励的泵浦源,使光子谐振放大的光学谐振腔三部分组成。
光纤激光器与半导体激光器的最大不同在于增益介质,半导体激光器使用的增益介质是半导体,而光纤激光器使用的增益介质是光纤。
半导体激光器的发光机理上文已经介绍过,泵浦源常为电激励方式,而光纤不能够直接实现电光转换,因此泵浦源常采用光激励方式,来实现光光转换,光纤激光器最常用的泵瀑源就是半导体激光器。
光纤激光器按照增益介质、谐振腔结构可以细分为很多类型,下面以稀土掺杂类增益介质、光栅反射镜谐振腔为例,介绍光纤激光器的工作原理,如图16所示。
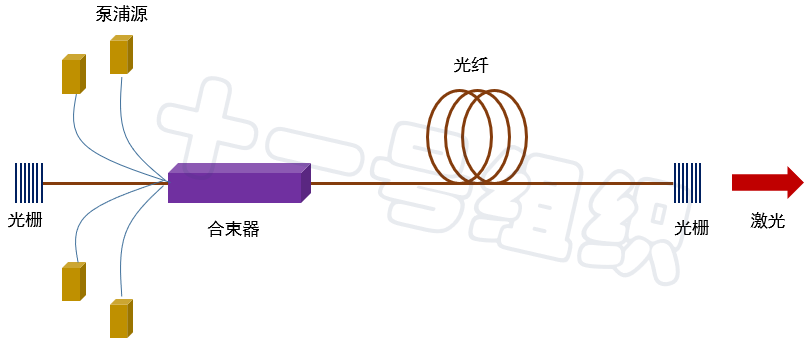 图16 光纤激光器原理
图16 光纤激光器原理
泵浦源又被成为“种子源”,通过合束器为光纤激光器提供高功率、高亮度的泵浦光。工作时,泵浦源发出的泵浦光耦合进入增益介质光纤中,泵浦光被吸收,吸收了光子能量的稀土离子发生能级跃迁并实现粒子数反转,反转后的粒子经过谐振腔,由激发态跃迁回基态,释放能量,并形成稳定的激光输出。
三、波长
任何一种光都有波长,激光也不例外,激光雷达最常使用的波长为905nm和1550nm,主流激光雷达波长如表2所示。
表2 主流激光雷达波长
关于激光波长,绕不开的一个话题就是人眼安全。当一束强烈的可见光照射眼睛,我们会本能的闭上眼睛来躲避光线。但是对于激光这种不可见的近红外光,当眼睛被照射时,眼睛并不会注意到它,如果累积了足够的能量,激光就会对我们的眼睛造成不可逆的伤害,包括视网膜灼伤以及白内障。
为了评价这种伤害的级别,国际电工委员会(International Electrotechnical Commission,IEC)制定了一份激光安全标准IEC 60825,标准中根据最大允许暴露度(Maximum Permissible Exposure,MPE)对激光进行分类。MPE指在给定波长和持续时间内,在不允许引起生物组织损伤的情况下,每单位面积允许的最大激光能量。
IEC 60825将激光划分为7类:1类、1M类、2类、2M类、3M类、3R类和4类。数字越大造成生物组织损伤的可能性越大,1类激光的风险非常低,并且“在合理可预见的使用范围内是安全的”。4类激光在光束内观察以及受到漫反射时都是危险的,它们还可能导致皮肤受伤,并有潜在的火灾威胁隐患。
IEC60825用不同脉宽的激光器做了MPE实验,如图17所示,横轴代表不同波长的激光,纵轴是人眼安全的MPE阈值,不同颜色的线代表不同脉宽的激光器。
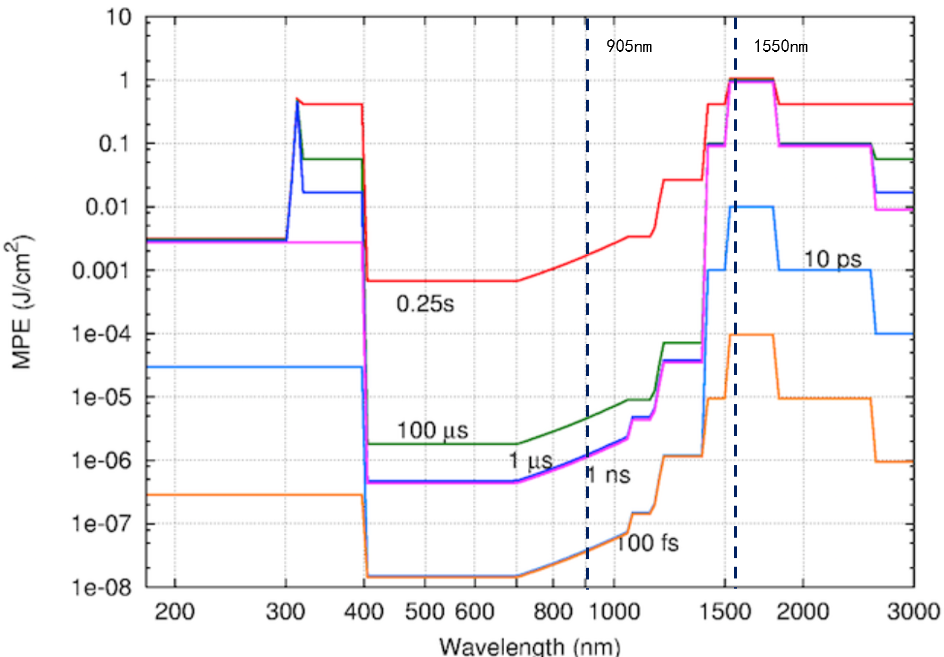 图17 不同波长激光器的MPE值
图17 不同波长激光器的MPE值
从图中可以看出,任何脉宽的1550nm激光器的MPE值都要比950nm激光器的MPE值高,这意味着人眼能承受更大能量的1550nm激光的照射,这意味着1550nm激光雷达将拥有更高的发射功率。
功率高、却能保证人眼安全的原因是1550nm的激光容易被水吸收,而人眼表面正好又一层水(眼液),所以要想伤我的视网膜,先过了我这层水再说。
发射功率高带来的最直接好处就是探测距离将更远,不信你看使用一个1550nm激光器的图达通的猎鹰灵动版激光雷达,在10%反射率的前提下,测距能力达到250m。而使用了905nm激光器的速腾聚创的RS-Lidar-M1激光雷达,在10%反射率的前提下,测距能力只有150m。
有矛就有盾,1550nm激光雷达的盾就是雨天,据部分公司的实测数据显示:2毫米厚的水层,不对,应该叫水薄膜都能将1550nm激光的90%能量吸收掉,这意味这小雨天要慎用、中雨及大雨用不了。
当然业界有一种声音,觉得如果雨水呈片状的“水帘”或“水滩”的话,1550nm激光被吸收的概率很大,但是如果是“雨点”的话,基本不具备完全屏蔽1550nm激光的能力。其实这种声音忽略了被测物体,无论大雨还是小雨,无论被测物体静止还是移动,在雨中呆上一段时间后表面都会形成一层水膜,所以你即使能躲避雨滴的吸收,你能躲避得了被测物体上的水膜?
所以矛与盾必然存在,就看厂家如何使用。
03 扫描方式之争
扫描方式是激光雷达最早也是最多被拿出来讨论的话题,以至于很多人今天再听到这个话题,都有一种“想吐”的感觉,但这条技术路线之争却是最充满腥风血雨的。
激光器、探测器也存在技术路线之争,但是很少听说因为选了不同类型激光器而导致公司“家徒四壁”,也很少听说因为选了不同类型探测器而导致公司“衣不蔽体”。
但扫描方式就不一样,选得好的已经是主机厂的座上宾,而选得不好的,好一点可能是暂时退出车载激光雷达领域,坏一点已经直接破产倒闭。所以扫描方式还是值得我们浓墨重彩地进行介绍。
按照扫描方式,激光雷达可以分为机械式、混合固态和固态三种。
机械式激光雷达实在没什么可说的,发射模块和接收模块在电机带动下,进行360°旋转扫描。
混合固态激光雷达包括三条技术路线:棱镜、转镜和MEMS微振镜。棱镜和转镜技术路线下,发射模块和接收模块固定不动,电机只带动一面或几面“镜子”旋转。MEMS微振镜技术路线更进一步,连电机也取消了,微振镜在静电、电磁、电热或压电驱动下往复运动,实现扫描。
固态激光雷达人如其名,就是内部没有一点机械运动部件,包括光学相控阵(Optical Phased Array,OPA)和Flash两种方案。
下文主要对激光雷达混合固态和固态两种扫描方式进行介绍。
一、混合固态
(1)棱镜棱镜路线的代表人物,也是唯一走这一条修炼道路的激光雷达厂商是LIVOX。LIVOX的名声大噪并不是因为它的母公司大疆创新在无人机领域的独霸武林,而是因为在2020年1月直接推出6499元面向自动驾驶领域的激光雷达Horizon。
LIVOX独创的非重复扫描技术,在0.1s的积分时间内,扫描覆盖率与机械旋转式64线激光雷达相当,而彼时机械旋转式64线激光雷达的平均价格还在10万元人民币左右。业界哗然,质疑、嫉妒与殷羡如潮水般涌来,都想弄清楚这到底是一类什么样的神奇物种?
LIVOX的思路也非常简单,既然成本主要花在收发模块上,那我就从减少他们数量上着手。可是数量减少,怎么实现和高线束机械旋转式激光雷达一样的点云效果呢?
LIVOX给出的解决方案是采用空间激光通信领域的旋转双棱镜(或称旋转双光楔)方案,如图18所示。在此方案中,半导体激光器PLD和雪崩光电探测器APD固定,双棱镜在电机带动下进行高速旋转。通过对光学参数进行特殊设计,可以产生不同角度的折射光线,从而实现视场角范围内更高线束的覆盖。而随着电机转速的不同,会产生出不同的扫描图案。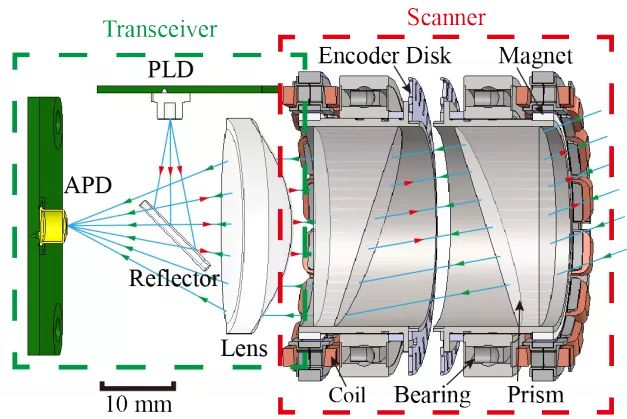 图18 LIVOX激光雷达双棱镜结构
图18 LIVOX激光雷达双棱镜结构
激光收发模块数量减少了(2021年8月上市的小鹏P5搭载的Livox车规版激光雷达HAP只有6组收发器,但100ms积分时间里可达到与144线机械旋转式激光雷达相同的点云效果),成本相应就大幅降低。激光收发模块固定,电机只须带动双棱镜旋转,避免了类似传统机械旋转式激光雷达的多次装调问题,量产能力也相应得到提高。
剩下就只有车规这一道关卡了,因为要用6组激光收发模块实现与144线机械旋转式激光雷达相同的点云效果,双棱镜在单位时间就必须玩命的转,最终导致电机转速高达6000r/min。要知道过了车规的Scala电机转速只有600r/min。
电机的寿命与电机的转速成反比,高转速对轴承及油脂选择大有讲究,这需要大量的耐久试验及超高的工艺水准,这类基础工艺也是中国制造业普遍欠缺的。
如今三年过去了,Horizon已从公司主页介绍中消失,继任者HAP在获得小鹏P5的定点后曾盛极一时,但很快湮灭在竞争对手的铁蹄下。2023年初,据宇多田在《一家大厂激光雷达的暂时“离场”》文章中报道:LIVOX已经决定暂时退出车载激光雷达业务线,转向“利润率倾轧没那么可怕”的工业与低速机器人等业务线。
我其实想不负责任的猜测一下:退场的原因不是利润率,而是棱镜这条技术路线适合不了车载领域,迟迟无法让产品达到满足主机厂要求的可靠稳定,会让研发陷入暗无天日的忙碌。韬光养晦,我想这是明智的选择。
(2)转镜
转镜赛道就比较热闹了,国外的厂商有Valeo、图达通,国内的有禾赛科技、镭神智能、华为等。且这一技术路线是最早诞生过车规产品的路线,就是Valeo和Ibeo合作研发的Scala。
2017年量产的第一代4线Scala 1是全球首款通过车规级认证的激光雷达,同年被首发搭载在奥迪A8上。2021年量产第二代16线Scala 2车规级激光雷达,同年被首发搭载在全新奔驰S级轿车上,Scala 2实物如图1-3所示。第三代Scala 3正在研发中,预计在2024年量产。
转镜方案中激光雷达收发模块不动,电机带动扫描镜围绕其圆心不断旋转,从而将激光束反射至空间的一定范围,其技术创新方面与机械旋转式激光雷达类似。在转镜方案中,存在一面扫描镜(一维转镜)、两面扫描镜(一纵一横,二维转镜)及多面镜等多种细分技术路线。
一维转镜方案常采用多面体反射镜,并通过小电机带动其旋转,从而将激光反射到不同的方向,此方案激光扫描线束依旧与激光雷达收发模块数量一致,仅是减少机械转动部件,比如禾赛科技的AT128。
二维转镜方案内部集成了两个转镜,一个多边棱镜负责横向旋转,一个负责纵向翻转,这样可以实现用一束激光实现两个方向维度上的扫描。此方案可以用更少的激光收发模块实现相同线束扫描效果,比如图达通的Falcon。
多面镜通过特殊的镜面设计,可以进一步减少激光收发器数量,在集成难度和成本控制上更有优势。
转镜方案相比棱镜方案,电机的转速明显下降,最高只有2000r/min。但仍存在高温耐久稳定性、视场角受限,信噪比低等问题。虽然各家推出的产品都说是车规级,但五年十万公里入门要求估计还很难达到,车规也分三六九等。
(3)MEMS微振镜
微机电系统(Micro-Electro-Mechanical System,MEMS)微振镜本质上是一种硅基半导体元器件,其特点是内部集成了微型的可绕悬臂梁振动的反射镜,如图19所示。
 图19 MEMS微振镜
图19 MEMS微振镜
微振镜被上下左右四个硅悬臂梁挂着,上下短悬臂梁被称为快轴,左右长悬臂梁被称为慢轴。在静电或电磁驱动下,微振镜可以在水平和垂直两个自由度围绕悬臂梁做往复运动,从而实现水平、垂直两个维度扫描。
也正是因为悬臂梁机械结构的存在,MEMS微振镜激光雷达虽然完全没有电机,但还是被划分在了混合固态之列。
慢轴的谐振频率通常为5~30Hz,为了使振动幅度大一些,其一般都做得比较细长,慢轴变形程度直接与水平视场角关联。快轴的谐振频率通常大于1KHz,为了可以实现这么高的谐振频率,一般做得又粗又短,快轴变形程度直接与垂直视场角关联。
微振镜的谐振频率与扫描频率正相关,振动幅度与扫描角度正相关,而扫描频率和扫描角度之间负相关。以某供应商的一款MEMS微振镜产品举例,镜面尺寸4X4.6mm,水平扫描角度为40°,垂直扫描角度为30°。所以一般为了实现水平120°的视场角,多数厂家选择拼接激光器的方案,几个激光收发单元共用一组MEMS微振镜,实现大视场角扫描。
凭借运动部件少、可靠性高、扫描频率快、半导体规模化生产带来的成本较低等优势,2021年底的时候,MEMS微振镜激光雷达迎来了自己的高光时刻,国内但凡规划有量产激光雷达车型的车企,80%都选择了国内一家供应商的MEMS微振镜激光雷达产品(主要也是其他技术路线当时没有能打的对手)。
但是这条技术路线也不是完美无缺,激光雷达按照收发光路来区分,可以细分为同轴和非同轴两种方案。
同轴方案是指激光器发射出去的激光和探测器接收回来的激光同轴,如图20所示。对于MEMS微振镜来说,一种典型技术方案是:激光器发射出激光,经过一面穿孔的反射镜,入射到微振镜上,经微振镜反射后打到被测物体后返回,会再次通过微振镜反射给穿孔的反射镜,从而被探测器接收。
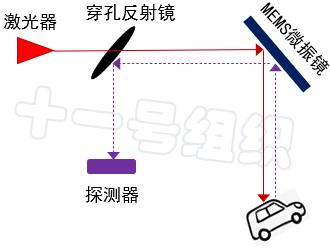 图20 同轴方案
图20 同轴方案
同轴方案的好处显而易见,只接收原光路返回的光信号,因而具有较好抗阳光干扰能力;收发模块可集成于一处,采用单颗探测器即可,成本相对可控。多个激光器拼接时,可以实现同时扫描互不干扰。Innoviz,速腾聚创部分产品采用的正是这种方案,其拿下的中国主机厂定点数量,恐怕十个指头数不过来。
但是同轴方案中MEMS微振镜尺寸直接与激光雷达测距能力关联,尺寸小,接收反射回来激光能力就弱,探测距离就短;尺寸大,接收反射回来激光能力强,探测距离长。为了实现更长的测距能力,激光雷达厂商普遍选择了更大尺寸的MEMS微振镜。
但从加工工艺来说,成熟工艺的硅基MEMS微振镜镜面直径1mm左右,其质量非常轻,可靠性是没问题的。但是当前激光雷达中的MEMS微振镜镜面直径普遍在5mm左右,在如此“负重”下,慢轴和快轴进行高频次大幅度来回扭转,将会变得更加容易断裂,这也是为什么MEMS微振镜激光雷达理论上容易过车规,但实际上却没那么容易的原因。
非同轴方案是指激光器发射出去的激光和探测器接收回来的激光不同轴,如图21所示。这意味着打到被测物体返回来的激光不用经过MEMS微振镜,而是直接进入到探测器中。此种方案中,MEMS微振镜可以选用更小的尺寸,可靠性会显著提高。
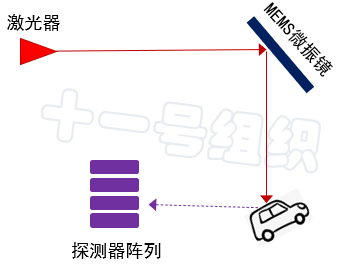 图21 非同轴方案
图21 非同轴方案
但是该方案为了提高抗阳光干扰能力,需要阵列化、性能更优的探测器,系统复杂度升高、体积较大,成本较高,一径科技的ML30s补忙激光雷达选用的就是非同轴方案。
温度是摆在MEMS微振镜面前另一座大山。采用硅基半导体工艺的MEMS微振镜,其线圈都很细地密布在镜面背后,导热性较差。与此同时,硅基MEMS微振镜被封闭在激光雷达的机壳里面。工作中的激光雷达,其MEMS微振镜的工作温度将比环境温度高至少20°,按照车规-40℃~85℃的要求,MEMS微振镜的车规温度要求要达到-40℃~105℃。这个对当前供应链来说确实有点困难。
二、固态
固态激光雷达则主要有 OPA和 Flash两种主流技术路线。
(1)OPA
光学上,对于频率(波长)相同、振动方向相同、相位差恒定的两束光,被称作相干光。相干光在传输时,相互之间会产生稳定的干涉。这种干涉,既可以是相长干涉(如图22左图),也可以是相消干涉(如图22右图)。很显然,相长干涉可以让光变得更强。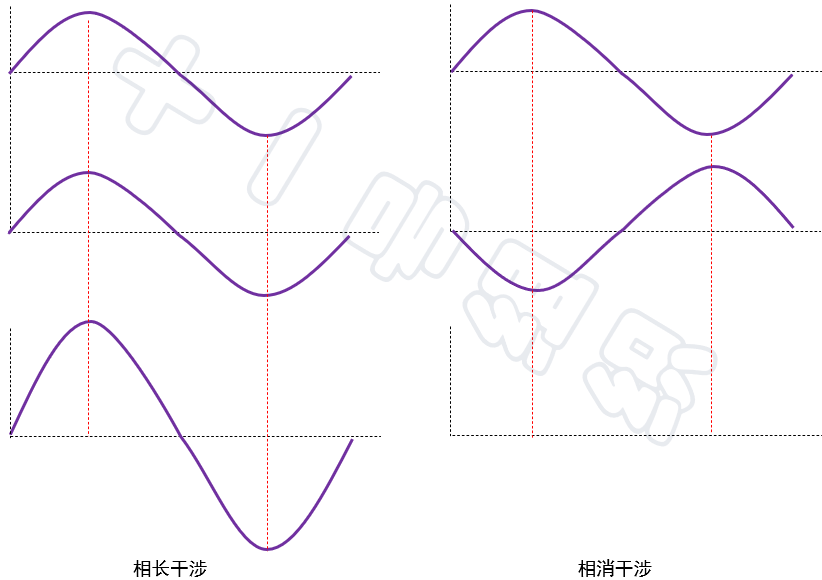 图22 光的干涉现象
图22 光的干涉现象
如果有多路光,在没有相位差(等相位)的情况下,发生相长干涉,光束的指向垂直于多路光的等相位面向前传播,如图23最左测图所示。如果赋予各路光均匀的相位差θ,那么各路光的等相位平面也将发生偏转θ,满足等相位的光发生相长干涉,不满足等相位的光发生相消干涉,因此光束的指向也发生了角度为θ的偏转,这就是一维光学相控阵的扫描原理。
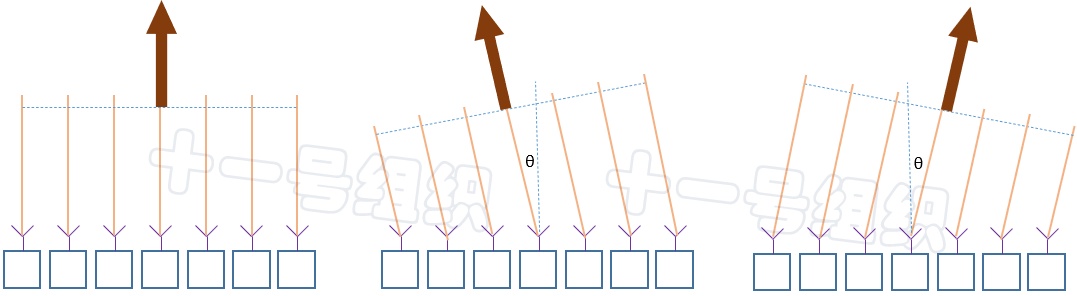 图23 光学相控阵一维扫描原理
图23 光学相控阵一维扫描原理
如果将这样的发光单元组成二维的光束阵列,那么便可以实现二维光学相控阵的扫描。
OPA激光雷达运用的就是光的相干原理,将若干激光发射单元组成发射阵列,通过改变加在不同发射单元上的电压,改变不同发射单元发射光波相位,在设定方向上产生互相加强的相长干涉,从而合成具有特定方向、高强度的激光主光束。而其它方向上从各个发射单元射出的光波产生相消干涉,辐射强度接近于零。
OPA激光雷达的一种典型结构如图24所示,激光光源经过分光器后进入光波导阵列,在光波导上通过外加电压,利用光波导间的光波相位差实现光束的扫描。
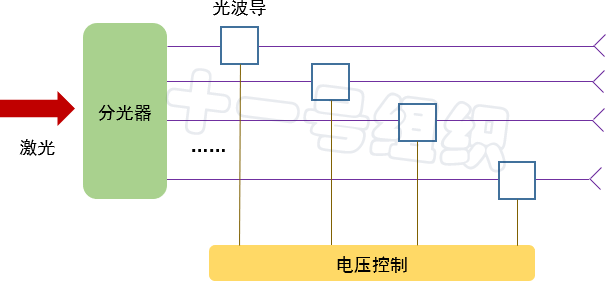
图24 OPA激光雷达的一种典型结构
OPA激光雷达是真正的纯固态激光雷达,所以将在可靠性、稳定性、成本、集成度、工艺上具有巨大优势。此外,OPA激光雷达还具有几个与众不同的优点:
(1)可以实现较高的扫描速度,达到MHz量级以上;
(2)扫描精度较高,可以做到千分之一度量级以上;
(3)可控性很好,在允许的角度范围内可以做到任意指向,所以可以任意设计感兴趣(Region of Interest,ROI)区域。
但是OPA激光雷达在封神的道路上还存在一些阻碍:
(1)旁瓣效应。OPA激光雷达形成的主光束称为主瓣,在主瓣旁边,由于阵列干扰,还容易形成旁瓣,如图25所示。旁瓣一方面会分散主瓣能量,影响探测距离。另一方面为了区分出主瓣,通常将旁瓣遮掉,而这又将影响视场角。
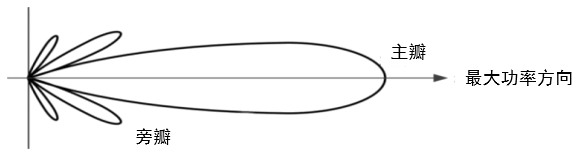 图25 旁瓣示意图
图25 旁瓣示意图
(2)工艺要求高、加工难度大。光学相控阵要求阵列单元尺寸必须不大于半个波长,对于905nm波长激光雷达来说,这就意味着阵列单元的尺寸必须不大于500nm。而且阵列数越多,阵列单元的尺寸越小,这就对加工精度要求更高;
(3)扫描角度有限。目前相位调节只能达到±60°左右。
OPA激光雷达的代表人物是美国的Quanergy,公司在2016年就公布了其OPA激光雷达产品,不过如今已经破产。
(2)Flash
前文介绍的几种扫描方式激光雷达,无论是转镜、MEMS还是OPA类型,发射模块发射出来的激光都是线状的,需要通过扫描模块的往复运动(分机械运动和非机械运动)把线变成面打在被测物体表面,因此扫描模块是必须的。
但是Flash激光雷达人如其名,采用的是快闪的非扫描方式,通过在短时间直接发射出一大片激光脉冲(面阵光),再通过高度灵敏的探测器接收,完成被测物体三维图像的构建。不严谨点比喻:Flash激光雷达就是一个会自己发光的摄像头。
这个时候再拿出禾赛科技招股书中的那张ToF激光雷达系统图,如图26所示,扫描模块部分的虚线就不会显得那么突兀了,扫描模块后括号里的若有就可以合理解释了。而Flash激光雷达就是没有扫描模块,只有发射模块和接收模块。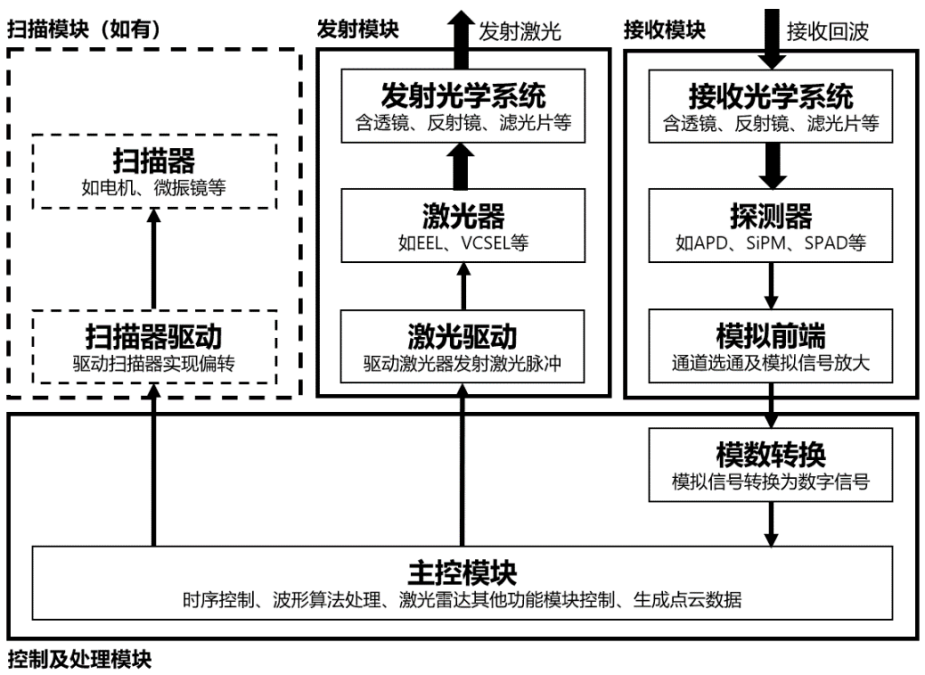 图26 ToF激光雷达系统图
图26 ToF激光雷达系统图
因VCSEL比EEL具备更大的发光面积,视场角可以做得比较大,更符合泛光成像的特点,因此Flash激光雷达多选用VCSEL作为激光器;EEL也不是不可以,但需要设计复杂的光学系统去扩散EEL发出来的激光,因此很少使用。
但是VCSEL功率密度低的缺陷,成为限制Flash激光雷达探测距离提升的主要瓶颈。这也是为什么当前发布的Flash激光雷达产品多以短距为主,但随着多结VCSEL激光器技术的突破,使用VCSEL开发长距激光雷达产品将成为可能。
当功率密度低遇上泛光成像,从被测物体返回来来的功率密度将更低,而探测器端也被迫选择了信噪比更高的探测器SPAD。
除了激光器和探测器,Flash激光雷达的光学系统和其他类型激光雷达也有所不同。
其他类型激光雷达发射光学系统通过对激光器发射出来的激光进行准直和整形,来使得激光发散角减小且符合使用要求的形状,接收光学系统通过收集反射后的光能量,并将其汇聚到探测器的光敏面上,以提高探测距离。
而Flash激光雷达要求发射出去的激光光束尽可能均匀地在整个视场角内扩散,因此不需要准直单,二是需要光束扩散器,控制发射激光视场角从而使变得均匀。Flash激光雷达接收光学系统相比于其他种类激光雷达需要具备“大相对孔径”和“照度均匀”的特点,但是三种类型激光雷达所用光学元器件没有太大差异。接收光学系统的“接收镜头组”由多个球面和非球面透镜组成,多个透镜会依次改变光束的视场角直至达到设计的HFOV和VFOV。
说起Flash激光雷达厂商,大家首先想到的应该是难兄难弟Ibeo和Ouster,但最早开始做Flash激光雷达的的确是大陆集团(2016年3月收购Flash激光雷达公司Advanced Scientific Concepts后获得此项魔法),只不过参数太过朴素罢了。
2017年大陆集团发布第一款Flash激光雷达SRL121,905nm波长,27°x11°的视场角,10m的探测能力,确实没什么姿色。2019年大陆集团发布第二款HFL110,1064nm,120°x30°视场角,22m的探测能力,姿色见涨也使其获得丰田氢燃料电池汽车Mirai和雷克萨斯LS500的青睐,用作侧向补盲。
第一篇文章中介绍已破产的Ibeo,2019年发布的距、短距和近距三款固态激光雷达产品,采用的正是Flash技术路线。
与Ibeo齐名,并与Velodyne已合并的另一家国外激光雷达企业Ouster,在2021年也发布了Flash激光雷达,同样包括短、中、长三款,里面将使用自研的SPAD探测器芯片,并计划在2025年量产上车。
2022年5月13日,亮道智能面向中国市场发布自研的纯固态Flash激光雷达——LDSense Satellite。
部分已发布Flash激光雷达参数汇总如下表3。
表3 部分Flash激光雷达参数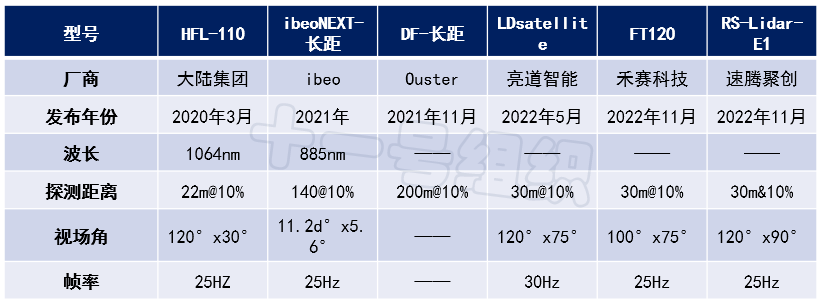
04 探测器之争
探测器遵循的处世之道:来而不往非礼也,激光器发射出去的激光、由探测器进行回礼接收并转化为电信号。这个处世之道的理论基础就是光电效应,而这个效应却源于一个意外的发现。
1886年,海因里希·赫兹(Heinrich Rudolf Hertz),就是那个用实验证明电磁波存在的男人,就是频率单位以他名字命名的男人,真人如图27所示,正在为证实麦克斯韦的电磁理论而专心致志地做电火花放电试验。
赫兹的实验装置如图28所示,主要包含电火花发生器和电火花接收器两部分组成。在开关闭合,电压上升到2万伏之后,两个小球之间的空气就会被击穿,产生蓝色电火花,同时引发一个向外传播的电磁波。而在不远处的接收器将感应出一个电动势,同样也在接收器的小球间产生电火花。
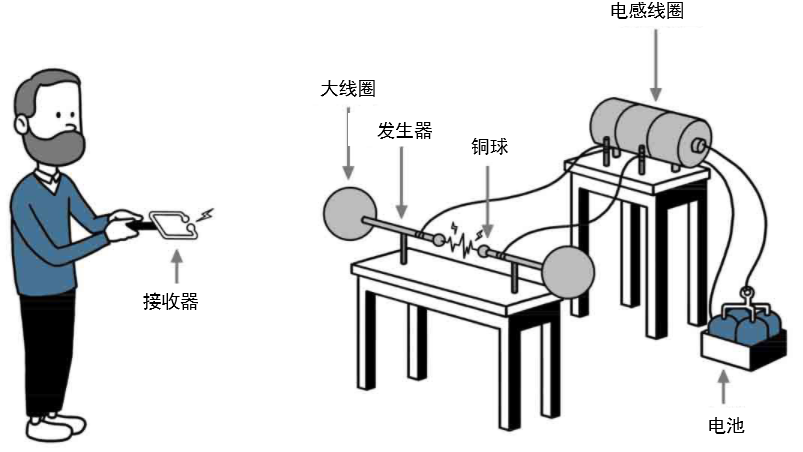 图28 赫兹试验装置简图
图28 赫兹试验装置简图
证实了电磁波存在之后,赫兹又开始通过实验研究起了电磁波的性质,一次偶尔的机会,赫兹用紫外线照射接收器,发现接收器两个小球间更容易产生电火花且电火花更亮。1887年,赫兹在《物理学年鉴》上发表了题为《论紫外光对放电的影响》的论文,揭开了光电效应研究的序幕。
后来这一现象引起了众多物理学家的关注,并在经年累月的试验研究后,还原了这一效应的本来面目。
激光器章节我们介绍过,物质都是由原子组成,而原子是由原子核和绕核运动的电子组成。但这个电子不是一个安分的家伙,在吸收部分能量变得强大之后就会尝试挣脱原子核的束缚选择逃逸,逃逸所需的最小能量被称为逸出功。
所以当外界有一个光子经过电子时,且光子能量大于电子逃逸所需的逸出功时,电子便有一定概率可以挣脱原子核的束缚,逃逸成为一个光电子,并留下孤独的空穴,此过程产生的电子-空穴对被称为光生载流子,这个过程被称为碰撞电离。
需要注意的是,当经过的光子能量恰好等于电子两能级之差时,电子吃掉光子后会由低能级跃迁到高能级,也就是激光器之争部分介绍的受激吸收,电子只是发生能级变化,并不能脱离原子核束缚变成自由电子。
光子的能量由光的频率决定,能使物质中电子逃逸出来的光子频率称为该物质的截止频率或极限频率,所以只有当照射物体的光子频率大于这一极限频率时,才会发生光电效应。
一、光电二极管
激光探测器正是利用光电效应将光转换为电的一种高灵敏度的半导体电子设备,主要部件就是光电二极管(photodiode,PD)。普通二极管我们比较熟悉,最常见的是由一个PN结加上相应的电极引线及管壳封装而成,具有单向导电性,加上正向电压时,二极管导通, 加上反向电压时,二极管截止。
PD与普通半导体二极管类似,只不过PD工作在反向电压下,且可以暴露在外,通过窗口或光纤连接进行封装,从而使光到达器件的感光部分。
与此同时,PD最常使用的不是PN结,而是PIN结。PIN结相比于PN结,中间多了一个I层,I层是掺杂浓度很低的一层N型半导体,由于浓度低的近乎本征(Intrinsic)半导体,故称I层。
I层较厚,几乎占据了整个耗尽区。绝大部分的入射光子在I层被吸收并产生电子-空穴对(光生载流子)。在I层两侧是掺杂浓度很高的P型和N型半导体,P层和N层很薄,吸收入射光子的比例很小,产生少量的光生载流子。
这种结构可以大大加快光电效应的响应速度,但是过大的耗尽区宽度将延长光生载流子在耗尽区内的漂移时间,反而导致响应变慢,因此耗尽区宽度要合理选择。通过控制耗尽区的宽度可以改变PIN结二极管的响应速度。
在实际使用中,根据反向偏置电压的不同,PD可以工作在三种不同的模式下,即线性模式、比例模式和盖革模式,其中比例模式和盖革模式合起来就是我们说的雪崩模式。普通PD工作在线性模式下,APD和SPAD工作在雪崩模式,如图29所示。
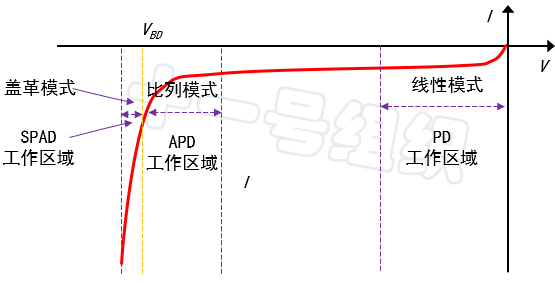 图29 PD三种工作模式
图29 PD三种工作模式
普通PD没有光照时,反向电流很小(一般小于0.1微安),称为暗电流。当有光照时,光子能量被普通PD中的电子吸收,逃逸出来成为光电子,使反向电流线性增大,如图30所示。
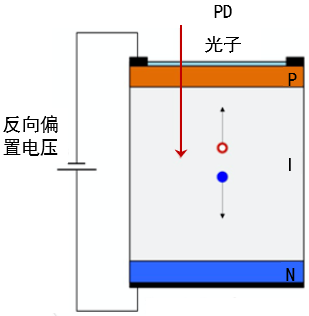 图30 PD结构及工作原理
图30 PD结构及工作原理
二、雪崩光电二极管(Avalanche photodiode,APD)
APD工作在雪崩模式下的比例模式,如上面图3所示,表现出有限的增益。
当APD两端反向偏置电压高于雪崩电压小于击穿电压VBD时,耗尽区的电场大小可以使得电子达到离化的阈值。在合适的光子照射下,I区电子吸收能量逃逸出来产生光电子,这个光电子在电场作用下移动,会去碰撞其他的原子,从而产生新的电子-空穴对,如此连锁反应,就像是雪崩了一样,因此被称为雪崩模式,如图31所示。
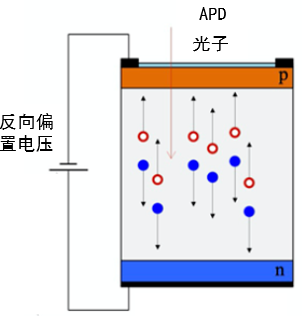 图31 PAD结构及工作原理
图31 PAD结构及工作原理
在雪崩模式下,APD电流与电压呈比例关系,具备高增益(1-103倍),在光子照射下电压很小的变化也会导致电流发生较大变化。因此APD是一种灵敏的测量光强的方法,但此灵敏度还不足以检测单个光子。
三、单光子雪崩二极管(Single photon avalanche diode,SPAD)
SPAD工作在雪崩模式下的盖革模式,如上面图3所示,此时SPAD表现出无限的增益。
当SPAD两端反向偏置电压高于击穿电压VBD时,耗尽区的电场大小不仅可以使得耗尽区电子达到离化的阈值,而且也将使空穴达到离化的阈值,这意味着除了光电子能够移动去碰撞其他原子,产生的空穴也将反向移动去碰撞其他原子,如此循环反馈,引发自我维持的雪崩,如图32所示。
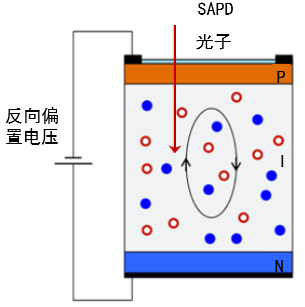 图32 SPAD结构及工作原理
图32 SPAD结构及工作原理
在盖革模式下,SPAD理论上增益可以达到无限大,因此SPAD是一种更灵敏的测量光强的方法,灵敏到可以检测单个光子。
由SPAD工作原理可知道,上述雪崩过程是自维持的,也就是说若没有外界干扰,雪崩将会一直持续下去。那么将产生两个问题,持续毫安级的大电流流经设备,会将设备烧毁;二是无法区分不同时间间隔到来的光子。
解决上述问题的一个方法就是淬灭电路,最简单的一种淬灭电路如图33所示,通过在SPAD串联一个千欧量级的大电阻。当SPAD内部发生雪崩产生大电流后,大电阻的分压作用将使SPAD两端的偏压降级,使其无法继续发生雪崩。
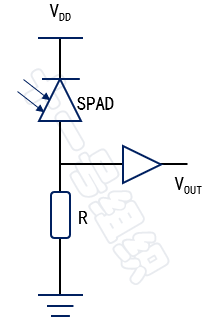 图33 SPAD一种淬灭电路
图33 SPAD一种淬灭电路
雪崩过程被终止后,SPAD两端的偏压将会以较快的速度开始充电过程,再将电压提高到可以触发雪崩模式的大小,等待下次光子触发。如此循环往复,形成与光信号对应的脉冲信号。如果将SPAD的输出连接到电压鉴别器,就能产生一个从逻辑0到0的数字信号输出,表示单个光子的到达。
结合图34我们再来详细说明一下淬灭的过程,给SPAD加载使其处于击穿态的偏置电压VBR,并处于亚稳态A点,在此状态下下,当有光子照射时,引起雪崩效应,从而出现电流脉冲(点A到B)。在淬灭电路作用下,偏置电压由B复位到C。而后经过充电过程,反向偏置电压将由C恢复到A,SPAD再次准备探测单个光子。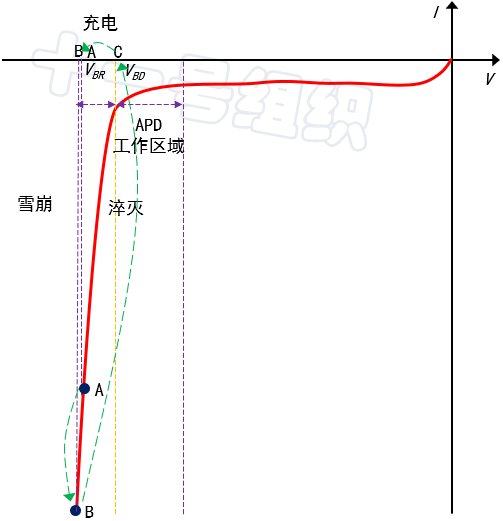 图34 淬灭工作过程
图34 淬灭工作过程
四、优缺点比较
(1)探测光子量级。如图35所示,APD最小探测的光子量级在 103,所以对于长距低反只有几十个光子返回的被测物体,APD无能为力。SPAD是单光子探测器,只需要一个光子但也至多检测一个光子,因为每次光子触发雪崩之后,需要几个纳秒的死区时间来准备下一次检测,所以SPAD的最大基数率有限制,大约100MHz。
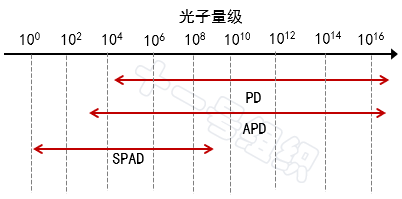 图35 探测所学光子量级比较
图35 探测所学光子量级比较
(2)连续信号采集。APD无死区时间,可以对光照进行连续信号采集,连续接收信号光。但是SPAD存在死区时间,即触发一次雪崩后,需要进行淬灭及充电,所需的死区时间从从几纳秒到一微秒不等。在死区时间里,SPAD对光不再敏感,无法接收光子,因此无法对光照进行连续信号采集。
(3)抗环境光干扰。APD需要由多光子触发,虽没有那么灵敏但也受环境光干扰较小。SPAD可由单光子触发,灵敏的同时也较容易受到环境光及其他激光雷达的干扰。
(4)集成难度。硅基SPAD的一大优点就是CMOS兼容性,即SPAD和电路可以在同一晶片上实现,易于制作高分辨率的密集阵列且成本较低。而APD属于分立器件,想要用作阵列就会加大自身尺寸且价格较高。
(5)光电增益高。SPAD的光电增益可以说是无限的,高增益让SPAD更为敏感,可以检测出单个光子。而APD的光电增益是有限的,无法对单光子进行检测。
(6)时间精度高。SPAD的时间精度可达100ps,信号传输速度快。
五、小结
因为入局门槛太高,所以研发SPAD的企业数量少、产品稀缺,核心技术还是掌握在国外供应商手里。目前市面上真正可以看到的车规级传感器,只有安森美的Padion SPAD和索尼的IMX459,而在中国市场,阜时科技、灵明光子、芯辉科技、宇称电子等也在布局研发SPAD,主要专注的市场还是在机器人、无人机等领域,部分企业开始推出车载产品。
05 测距方式之争
测距方式是激光雷达更高维度的分类方式,针对其优缺点讨论更是络绎不绝。
按照测距方式不同,激光雷达主要分为飞行时间法(Time of Flight,ToF)与调频连续波(Frequency Modulated Continuous Wave,FMCW)法两类。
ToF法是目前量产激光雷达的绝大多数选择,FMCW法仅有极少数厂家可以提供量产产品。
一、ToF
在ToF方法中,激光器在短时间间隔内一个接一个地发射多个激光脉冲,如图36所示。
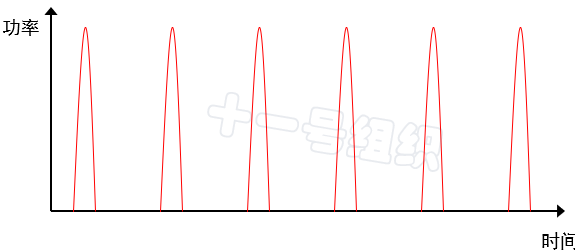 图36 ToF激光雷达激光脉冲
图36 ToF激光雷达激光脉冲
激光脉冲打到物体后返回,探测器检测到回波后,内部处理单元计算发送和接收之间时间差,并基于公式距离=光速x时间差来计算激光雷达与被测物体之间距离,测距原理如图37所示。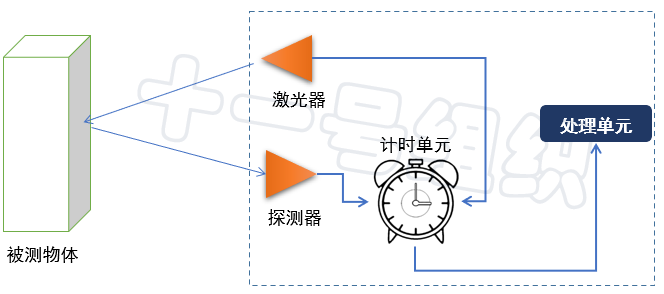
图37 ToF激光雷达测距原理图
二、FMCW
FMCW激光雷达虽然近两年才开始在自动驾驶领域走红,但它的身份其实是个60后,1967年诞生于麻省理工学院林肯实验室。
与ToF激光雷达发射脉冲激光束不同,FMCW激光雷达发射的是调频连续激光束,同时分成两束,一束留在本地作为本振光,一束发射出去。而通过相干检测的方式,测量回波信号与本振光之间由距离延时引入的调制频率差和相对速度引入的多普勒频率差,可以求出被测物体的距离与速度。
FMCW激光雷达常用的调频方式有三角波形式、锯齿波形式和正弦形式,如图38所示。周期T称为信号重复时间,频率的变化范围称为调制带宽B。
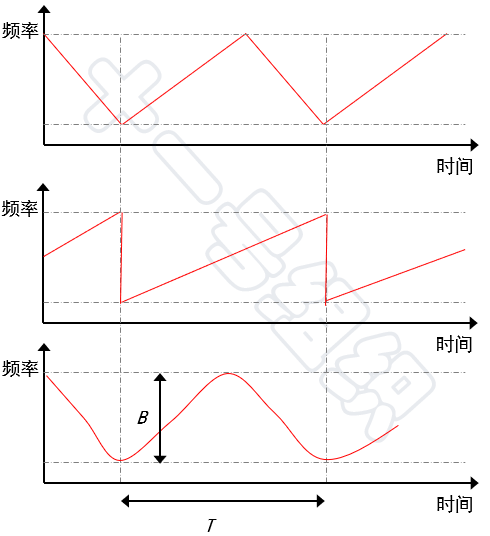 图38 FMCW激光雷达常用的三种调频方式
图38 FMCW激光雷达常用的三种调频方式
FMCW激光雷达可以根据测量目的不同,选择不同的调制方式。比如与被测物体之间多普勒效应可以忽略的场景,可以选用锯齿波调制方式,从而实现更大的探测距离。而如果想要实现同时测距和测速,且更容易解调出多普勒频移,三角波调制方式是个不错的选择,三角波调制方式也是车载FMCW激光雷达最常使用的方式。
下面我们以三角波调制方式为例,介绍FMCW激光雷达的测距和测速原理。
发射出去的调频连续激光束,在打到被测物体后,由于多普勒效应,会发生频率变化,假设被测物体正在朝远离激光雷达的方向运动,那么回波信号的频率将下降。由于多普勒效应导致回波信号与发射信号之间频率出现的差值称为多普勒频移fd,如图39所示。
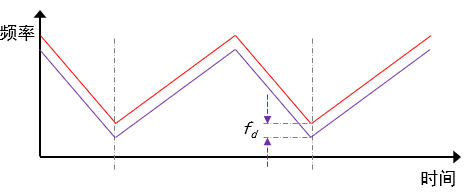 图39 多普勒频移
图39 多普勒频移
此外,由于激光雷达和被测物体之间有一段距离,信号传输需要一定时间,因此存在因距离延时引入的调制频率差fr,如图40所示。
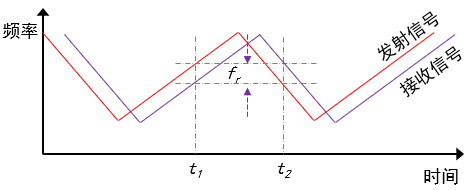 图40 调制频率差
图40 调制频率差
当多普勒效应遇上距离延时,两种作用叠加在一起,就变成图41所示的效果。
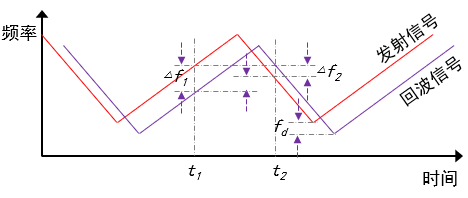 图41 多普勒效应遇上距离延时综合作用
图41 多普勒效应遇上距离延时综合作用
由图6可以看出,在频率上升沿t1时刻产生的频率差为Δf1=fr+fd,在频率下降沿t1时刻产生的频率差为Δf2=fr-fd,联立方程组即可求出fr和fd。
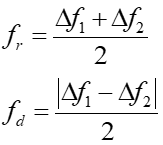
对于发射信号来说,其频率变化速率为2B/T,则距离延时用频率差除以频率变化速度即可求出。
有了距离延时,再乘以光速c,便可以求出与被测物体的距离R。
最后根据多普勒公式,还可以求出被测物体的速度。
三、对比
FMCW激光雷达被称为激光雷达领域皇冠上的明珠,与ToF类型激光雷达在以下性能上有着明显的区别。
(1)抗串扰及干扰能力
串扰可能来自其他车辆上的激光雷达、也可能来自自身车辆的其他其他激光雷达;干扰主要来自环境光。
ToF类型激光雷达发出去的激光脉冲和接收的激光脉冲,原本就是一束,波长一样的。将来如果有特别多的车装有激光雷达,行业标准一样,那么就很难识别是自己发射出去激光脉冲的回波,还是其他车激光雷达发射的激光脉冲。
解决这个问题常见的做法是对每一束激光脉冲进行单独编码,保证不同激光雷达发射的脉冲是不可重复的、不可变化的真随机发射脉冲序列,也就是每一束激光脉冲都是独一无二的。不过,编码会导致信噪比下降,进而牺牲测距能力。
此外,同一辆车上的两个相邻ToF类型激光雷达A和B,如果安装位置比较凑巧,激光雷达A发射的激光脉冲经过漫反射之后被激光雷达B接收。这个时候也存在较小的概率使激光雷达B无法分辨是自己发射的激光脉冲的回波还是旁边激光雷达A的回波。
对于此类问题,可以通过加装时钟同步模块,将同一辆车上的所有激光雷达的扫描动作与同一个时钟信号保持同步。在发射器发射一个激光脉冲后,在同步时钟的计算下,探测器延后一定时间进行接收,随后关闭。如果在此时间接收不到,则认为丢点。此方法能尽量避免相邻雷达激光脉冲漫反射的影响。
与此同时,ToF类型激光雷达,基于直接探测的原理,直接测量激光脉冲的回波信号,探测器本身不具备区别进入探测器的回波是自身发出激光脉冲的回波还是环境光。因此当激光雷达视窗直面阳光,如果处理得不好,很容易在激光点云中出现雪花一样的噪点。
如果对阳光更敏感的1550nm激光发射器开始大规模应用在ToF类型激光雷达后,这个问题将更加严重。这个问题可以从系统和算法两个层面去优化,系统层面可以通过各种滤波片来对抗干扰,也可以把焦距做得更长使其接触更少的阳光,但是将牺牲视场角;算法层面可以加入接收回波与发射脉冲的能量对比策略,忽略能量较小的阳光干扰。
而对于FMCW激光雷达,采用的是相干检测技术,回波信号会被本振光(激光器留在本地的一部分激光)放大,这个放大倍数是非常高的,放大后的信号处理起来就非常方便。而且,FMCW利用的是一个很窄频的激光器,频率在100kHz量级,相当于要在百万分之一纳米这么窄的一个光谱上跟自己做混频,其他跟这个频率不吻合的信号都会过滤掉,同频的情况只会发生在百万分之一纳米的范围内,在今后即使很多车辆都搭载激光雷达的状态下互扰的概率就非常低。
对于干扰,虽然环境光是广谱的光,但FMCW只会接收自己发出去频率相同或相近的光,FMCW激光雷达内置的光源的强度要比反射进来的阳光强度高至少三个数量级,因此,阳光对它的影响基本可以忽略不计。此外,FMCW激光雷达的滤波片很小很小(ToF激光雷达的滤波片带宽有20-30纳米,而FMCW激光雷达的滤波片带宽则在0.01纳米以内。),因此抗干扰能力很强。
(2)测速能力
FMCW基于多普勒效应,可以直接提供被测物体的实时速度信息。ToF虽然也可以输出速度信息,但需要多帧距离信息去求导,带来的延迟在一些场景下具有不可忽视的危害。
比如路边车门突然打开,下来一个人,俗称“开门杀”。ToF激光雷达则通常需要2-3秒才能识别出来,这个反应时间在紧急情况下,显然有点长了。而对于FMCW激光雷达来说,一帧就可以识别出来。
还有一个场景,就是“鬼探头”,车辆行驶过程中,前方行人突然从停着的车辆前出现,这个人的身体大部分都被车子挡住,只露了个头出来,但即使是这么小的一个头,FMCW也能马上识别。
(3)信噪比
信噪比(Signal-to-noise Ratio,SNR),指的是系统中信号与噪声的比。对于激光雷达来说,信噪比越高,意味着收到的回波信号中,有用成分越高,干扰分量越少。
上文已介绍,ToF激光雷达对其他激光雷达发出去的激光、环境光等都容易误识别为自己发射出去激光的回波,因而信噪比低。而FMCW激光雷达基于相干检测的方式,信噪比高3~4个数量级。
(4)远距离测量能力
探测距离更远,是FMCW激光雷达具有争议的一项能力。
对于一款250m@10%探测能力的1550nm激光雷达来说,不是说250m外10%的被测物体全都探测不到,而是指原本要返回100个点云,现在仅返回了1个点云,考虑到ToF激光雷达的信噪比,这样的点还是归类为噪点滤掉比较好。
而对于1550nm FMCW激光雷达来说,虽然仅返回了一个点云,但是此点云带有速度信息且考虑到FMCW激光雷达信噪比高,所以你是可以相信我这个点的。
这是FMCW可以不区分反射率达到500m探测能力的原因,但其实在我内心,仅凭一两个带速度信息的点就相信前面有物体,还是胆子大了一点。
(5)芯片化
芯片化被认为是激光雷达的终极产品形态,也是激光雷达厂商构筑起技术壁垒的护城河。在这一理想指引下,ToF激光雷达已经做了一些有益的尝试,比如部分厂商已经将激光器和探测器分别芯片化,但如何将光学部件及扫描模块也实现芯片化,是摆在行业面前的一道难题。
而FMCW激光雷达的最大的好处之一就是可以基于硅光技术实现集成,激光器、探测器、扫描模块不仅可以芯片化,还有可能设计成一个SOC,理想状态下甚至连光学部件也能实现芯片化,因此FMCW具有更彻底芯片化的潜质。
(6)成本
从长远来看,FMCW更彻底的芯片化潜质,在大规模出货后,将展现出巨大的成本优势。但在当前,无论是1550nm激光器、光学元器件还是电子元器件的高成本,都让FMCW激光雷达比ToF激光雷达更贵。
四、行业
FMCW激光雷达虽然具有远大的前景,但受制于上下游技术瓶颈,目前尚未有量产的产品。目前走在研发前列的多为国外公司,包括Mobileye、Avea、Aurora(收购了Blackmore和OURS)等。
值得一提的是,Aeva在2022年2月发布(预计2024年量产)第三代FMCW激光雷达Aareis II,已经成功将激光器、探测器和光学部件集成到一块只要硬币大小的芯片上
国内公司像洛微科技、光勺科技、擎感光子等也在积极布局。
06 主流激光雷达产品介绍
前面五篇文章,笔者详细介绍了激光雷达不同技术路线的工作原理,而用这些技术路线组合出来的主流产品具有什么样的性能,其实是主机厂更关心的话题。
从市场份额来看,禾赛科技、速腾聚创、图达通无疑是激光雷达行业的头部三熊,各家的主流产品AT128、RS-Lidar-M1和Falcon已经得到部分主机厂管理层的认可,本篇文章,笔者就对这三款产品进行一个基本介绍。
01 禾赛科技AT128
AT128是禾赛科技在2021年8月份推出的一款混合固态激光雷达产品,首发车型为2022年6月上市的理想L9。其核心的性能参数如表4所示。
表4 AT128核心性能参数

AT128人如其名,有128个货真价实的激光器,我们知道,激光器成本在激光雷达整个成本里占大头,别人用五六个,你用一百多个,成本上如何找到最优解呢。禾赛科技给出的解决方案是芯片化,通过半导体工艺将芯片阵列化,图43蓝色矩形框框起来的部分就是128个激光器的芯片阵列化方案。阵列化方案可以减少产线装配时间、光路调整时间,从而提高生产效率、降低生产成本。
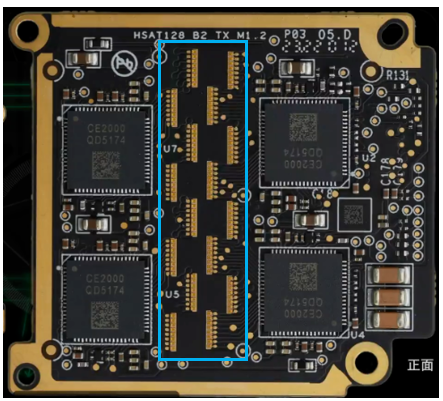 图43 AT128 激光器阵列化方案
图43 AT128 激光器阵列化方案
目前半导体激光器有两种,EEL和VSCEL,VSCEL激光器垂直衬底表面发光,特别适合利用半导体工艺实现大规模发光阵列。从部分自媒体的拆解报告来看,AT128里面使用的是Lumentum峰值功率为70W、波长为905nm的VCSEL激光器,型号应该是M51-100。
但是VCSEL的缺点是功率密度低,比EEL低一个数量级,而在功率密度低而想提高探测距离的就只能选用效率及灵敏度更高为探测器,为此AT128里选用的是SiPM探测器。
AT128扫描模块为转镜方案,因为有实实在在的128个激光器,所以只需要一维转镜即可,负责水平视场角扫描。
02 图达通Falcon
Falcon是图达通和蔚来在2021年1月NIO Day上联合推出的一款混合固态激光雷达产品,首发车型为2022年3月上市的蔚来ET7,其核心的性能参数如表3所示。
表5 Falcon核心性能参数

我们先从图达通2019年在国内申请的一份专利《用于LIDAR系统的二维操纵系统》来整体了解一下这款激光雷达采用的技术路线。
如图44所示,整个系统包含光源706,扫描光学器件712,可旋转多面棱体702和探测器712。
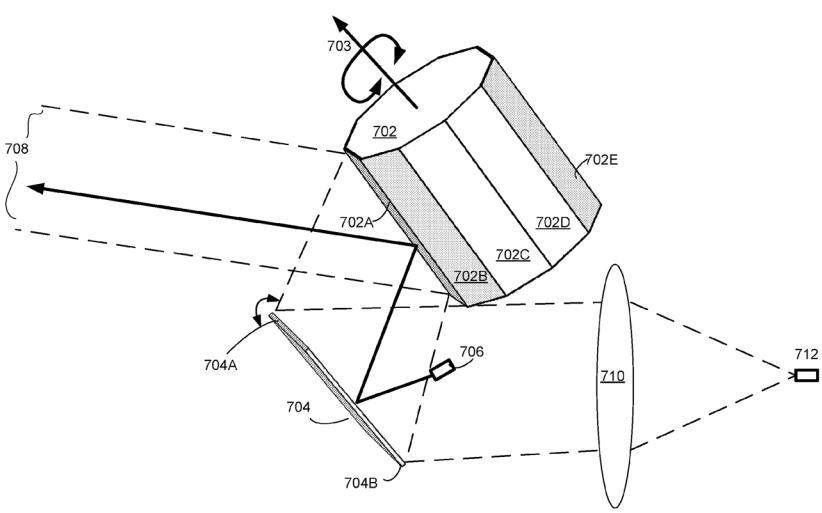 图44 专利《用于LIDAR系统的二维操纵系统》中附图
图44 专利《用于LIDAR系统的二维操纵系统》中附图
光源和探测器数量可以是一个或多个,扫描光学器件可以是镜式检流计、旋转镜或光栅中的任意一种,主要作用是将光源发射的一个或多个光信号反射到旋转多面棱体上。扫描光学器件采用倾斜的方式并以一定方向来扫描光源的一个或多个信号。
可旋转多面棱体具有任意数量的反射面,可以是6/8/10/20……个。可旋转多面棱体基于驱动电机绕着轴线703旋转,以沿着垂直于旋转轴线方向扫描从光源递送过来的光信号。
扫描光学器件用来负责垂直方向扫描,可旋转多面棱体负责水平方向扫描。发射出去的光信号在708区域内击中对象发生散射后,返回的光信号返回到旋转多面棱体上,反射回到扫描光学器件,并由透镜710聚焦到探测器712上。
接下来我们就看一下部分自媒体的拆解分析。
从实物拆解来看,Falcon光源部分采用了一个1550nm的光纤激光器,这也是最远500m,10%反射率下250m测距能力的基础。扫描模块采用振镜+棱镜的技术方案,振镜(非MEMS微振镜)在摆动电机的作用下负责垂直25°范围内的扫描,棱镜采用的是五边形,在旋转电机的作用下负责水平120°范围内的扫描。
振镜+棱镜的组合也让Falcon具有动态调节感兴趣区域(Region of Interest,ROI)的能力,通过降低振镜摆动电机在某一角度区间内的旋转速度,可以让垂直角度范围内扫描点更密集,棱镜的转速虽然是恒定不变的,但是通过周期性提升激光器点频,也能在特定的水平视场角内让扫描电更密集,ROI扫描示意图如图45所示。
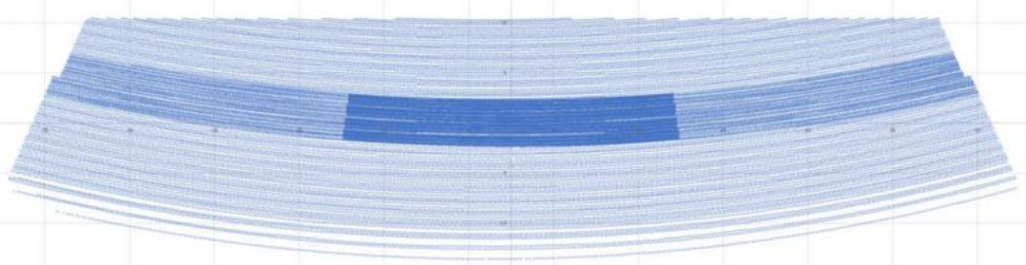 图45 Falcon ROI扫描示意图(来源中信证券)
图45 Falcon ROI扫描示意图(来源中信证券)
通过此种调节,ROI点云密度可以做到非ROI点云密度的6倍,ROI区域的角度分辨率也可以达到0.06°x0.06°。
由于光线激光器的功率密度足够,Falcon探测器选用了普通的APD探测器,这也是该省省、该花花。
03 速腾聚创RS-Lidar-M1
M1是速腾聚创2018年1月在美国CES展上推出的一款混合固态激光雷达产品,只不过当时还是工程样机阶段,后经过两年的打磨,SOP版本于2020年1月推出,首发车型为2022年9月上市的小鹏G9。其核心的性能参数如表3所示。
表6 M1核心性能参数

2021年是M1这颗激光雷达的高光时刻,到这一年的年底,共获得约40余款车型定点,成为当时拿到车企前装定点最多的激光雷达企业,后来禾赛科技AT128量产后,这一局面才被打破。下面笔者从民生电子拆机报告里,汇总一些M1核心零部件信息。
激光器类型为EEL,数量为5个,供应商为欧司朗。扫描模块为MEMS微振镜,镜面尺寸5mm左右,供应商为希景科技。其扫描示意图如图46所示,由六个区域拼接而成。探测器类型为SiPM,供应商为安森美。处理器为赛灵思的FPGA方案,型号为:XAZU2EG。
 图46 MI扫描示意图(来源中信证券)
图46 MI扫描示意图(来源中信证券)
04 总结
2024年1月份的美国CES展上,禾赛科技推出了物理512线超高清超远距激光雷达AT512,速腾聚创发布了940nm超长距激光雷达M3,图达通联手Wideye推出了一种创新的车内激光雷达解决方案,法雷奥祭出了性能卓越的SCALA 3,Aeva推出首款可量产汽车级FMCW 4D激光雷达Atlas……激光雷达的创新还在路上,智驾的感知终局方案还存在变数。

-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8406
-
自动驾驶真的会来吗?2016-07-21 14613
-
自动驾驶的到来2017-06-08 7484
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5545
-
无人驾驶与自动驾驶的差别性2017-09-28 6589
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 6161
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3325
-
自动驾驶汽车的定位技术2019-05-09 3559
-
如何让自动驾驶更加安全?2019-05-13 3790
-
为何自动驾驶需要5G?2020-06-08 4323
-
请问摄像头、雷达和LIDAR哪个更适合自动驾驶汽车?2020-11-23 5612
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 3200
-
谈一谈自动驾驶的激光雷达2021-06-17 13478
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 2494
-
自动驾驶激光雷达及非硅15W高导热绝缘氮化硼材料介绍2024-04-24 2383
全部0条评论

快来发表一下你的评论吧 !
