

安森美分析车载网络的发展趋势
描述
本文作者:安森美模拟与混合信号事业部,资深市场营销经理Min Su You
随着车辆愈发先进,有助于提升道路安全性能、提供驾驶辅助功能以及提高能效,其底层技术的重要性也随之增加。无论是传统的内燃机(ICE)驱动车辆、混合动力汽车还是纯电动汽车,汽车设计中都包含了数十种传感器、微控制器及执行器,所有这些器件都会产生或处理大量的数据。
现代车辆不仅仅是一种交通工具,更是车轮上的先进计算平台。与所有计算系统一样,有效传输数据的能力对于这类系统的平稳运行和安全操作至关重要。
常用车载网络技术(IVN)
电子技术在车辆中已应用数十年,提供了许多实用功能,通常是为了增强安全性或娱乐性。在早期,这些功能很多都是独立存在的,既不向车辆的其他系统提供数据,也不依赖于其他系统产生的数据。然而,随着技术的进步,集成化带来的优势逐渐显现,汽车专用的网络技术随之应运而生。
在车辆中普遍采用的协议包括LIN总线(LocalInterconnect Network, LIN)、CAN总线(ControllerArea Network, CAN/CAN-FD)、FlexRay总线以及MOST总线(MediaOriented System Transport,MOST)。虽然每种解决方案都有其独特之处,并可满足不同的设计考量,但更重要的是,这些现有的技术方案难以满足现代车辆日益增长的需求。
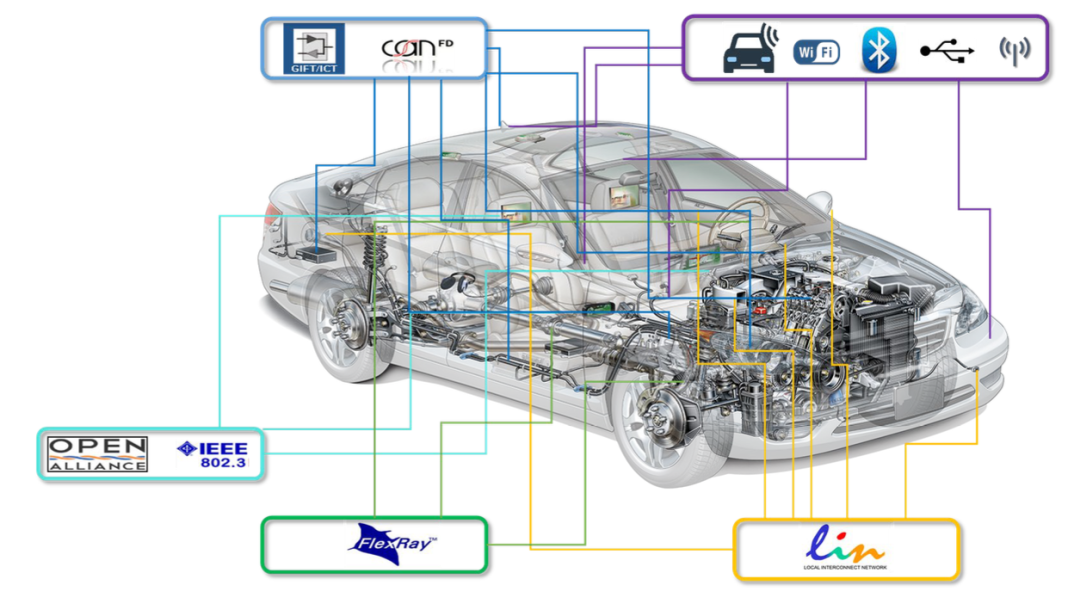
图1:针对车载应用,已有多种通信协议被开发出来
LIN总线是一项成本效益高的技术,对于低数据速率(<20kbps)的应用场景来说易于实施和部署。然而,由于其带宽有限,并且系统节点数量被限制在12个以内,这限制了它在现代车辆中的价值。
CAN总线(以及后续迭代版本如CAN-FD)因其非常稳定可靠且相对不受电气干扰和噪声影响,在车辆和其他安全关键系统中得到了广泛应用。然而,有限的带宽(通常约为2Mbps)限制了它在某些数据密集型应用(如信息娱乐系统和摄像头)中的使用,同时也限制了节点的数量。目前,新的CAN-XL标准正在开发中,以处理更高速度并具备与以太网衔接的能力,但对于许多工程师来说,直接过渡到全以太网解决方案看起来更具吸引力。
FlexRay总线提供了精确的时序和同步功能,使其适用于诸如线控驱动等时间关键型应用。然而,与其他方式相比,复杂性限制了其普及程度。
MOST总线仅用于信息娱乐系统,其适用性有限且成本高昂,因此随着该技术的逐步淘汰,已被其他解决方案所取代。
以太网被许多人视为替代现有多种解决方案的理想选择,它可以提供高带宽和低延迟的通信能力。然而,现行的以太网协议存在一个问题,即其固有的载波侦听多路访问/冲突检测(CarrierSense Multiple Access with Collision Detection,CSMA/CD)机制,这意味着无法实现确定性操作,从而不适用于任何时间敏感的应用场景,比如线控驱动等。
此外,以太网技术的成本也是一个问题。然而,考虑到以太网的巨大潜力,现在已经出现了如10BASE-T1S这样的确定性协议,它包含了物理层冲突避免(PhysicalLayer Collision Avoidance,PLCA)机制(参见图2),为时间关键型应用提供了所需的性能。此外,汽车以太网设备的成本正在迅速下降,这使得更多的汽车制造商能够应用高带宽特性。
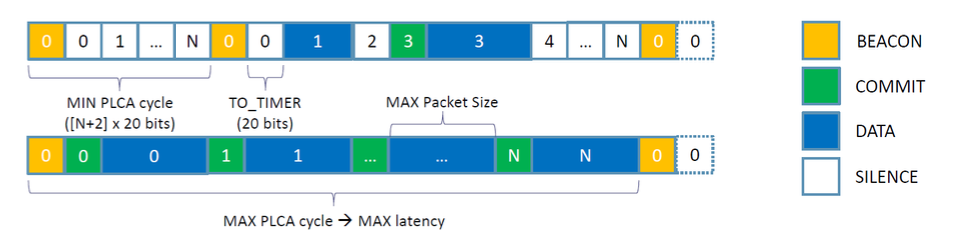
图2:在PLCA周期中,每个“从设备”发送数据之前,“主设备”会通过一个“BEACON”信号开始通信,从而避免冲突和相关的重传开销
以太网在OPEN联盟等组织的推动下不断发展,以满足现代汽车日益增长的带宽需求。新标准(如IEEEP802.3dh)使未来车辆中的光纤应用成为可能,用以支持低延迟4K视频和增强现实等要求极苛刻的技术。
包括蓝牙、Wi-Fi和移动通信在内的无线协议通常用于驾驶员和乘客连接他们的移动设备。无线通信的主要需求源于其能够在有线连接无法实现的情况下完成某些功能,例如胎压监测(TPMS)和无钥匙进入(仅举两例)。然而,随着"车联网"(V2X)技术的发展,车辆可以与其他车辆及其周围环境进行通信,对无线通信的需求也进一步增加,但随之而来的是对更高安全性的需求。
车辆架构
由于车辆内部遍布着众多子系统和传感器,汽车制造商必须谨慎选择车辆架构。主要有两种选择——域(domain)架构或区域控制(zonal)架构。现有的基于域的架构将具有相似功能的部分(例如,传动系统、底盘和舒适性)组合在一起——尽管它们的位置可能分散在车辆的各个部位,这需要更多的布线,也增加了重量和成本。
为了避免这一问题,许多汽车制造商现在更倾向于采用区域控制架构的方法,即尽管功能不同,但仍将位置相近的子系统分组。因此,可以指定“右前”、“左后”等区域。虽然这种方法减少了布线需求,但也会在各区之间的车辆通信"主干"上增加数据量,因此要求车载网络具有更高的性能和带宽。
通常情况下,每个分区都高度集成了专用计算资源,通过高速(和确定性)通信主干网与主CPU连接,以支持先进驾驶辅助系统(ADAS)和线控驱动等实时应用。采用区域控制架构使车辆功能和特性的集成、移除或升级提供了更大的灵活性。它易于扩展并适应不断变化的需求。
虽然区域控制架构有可能带来诸多好处,但其实施也会导致对车载网络性能需求的增加。这主要是由于需要更高的数据流量、低延迟、冗余、可扩展性支持以及更好的安全性和诊断功能。
功能安全
随着车辆的自动化程度越来越高,对功能安全和冗余措施的需求也在增强。越来越多的系统要求符合更高的ISO26262汽车安全完整性等级(ASIL),随着驾驶员越来越依赖车辆自身做出的决策和采取的行动,安全等级要求正从A级和B级向更为严格的C级和D级组件过渡。功能安全涵盖了从概念设计到车辆最终退役的所有设计环节。
毫无疑问,这对整个车辆结构以及车载网络都有着重大影响。对于自动紧急制动和自适应巡航等高性能ADAS功能而言,低延迟数据传输至关重要。要实现功能安全合规性,就必须在传感器和通信路径上部署冗余以及精密的容错机制。
虽然所有车辆的安全关键功能都需要时间敏感型网络(TSN),但向区域控制架构的转变增强了这种需求。时序的精确调整和延迟补偿对于确保ADAS功能的正确运行至关重要,尤其是当图像传感器、激光雷达模块和电子控制系统等元件分布在车辆的不同区域时。即使是在不同区域使用麦克风进行降噪等应用,也需要TSN才能有效工作。在以太网解决方案方面,现有的TSN以太网协议可重新用于汽车用途。
在图像传感器和摄像头接口方面,MIPICSI-2(摄像头串行接口)和DSI-2(显示串行接口)支持高速数据传输,是摄像头系统、显示屏和信息娱乐系统之间传输大量数据的理想选择。移动产业处理器接口联盟(MobileIndustry Processor Interface,MIPI)和汽车串行/解串通信技术联盟(AutomotiveSerdes Alliance,ASA)正在进一步开发一种标准化的串行/解串(SerDes)解决方案。
最终,ASA运动连接技术(ASAML)将获准与MIPICSI-2 集成。在这一合作中,还对增强MIPI协议的安全性和用于摄像头的非对称以太网(高带宽传输,低带宽接收)进行了研究。
安森美(onsemi)在车载网络(IVN)中的角色
安森美在车载网络领域拥有超过三十年的丰富经验,提供创新产品和一流的应用支持。目前,解决方案组合以许多现有的车载网络技术为基础,包括LIN、CAN和FlexRay。未来几年,将陆续发布LIN和CAN产品的增强版本,由于对FlexRay的发展预期不乐观,所以对该协议的投资即使有,也不会太多。
显然,10BASE-T1S以太网将是汽车行业的一个重点领域。安森美已经推出了首批产品,目前正在为这一重要协议开发第二代产品组合。随着大多数汽车制造商预计采用区域控制架构,10BASE-T1S将成为未来汽车通信的基本组成部分。对于要求高吞吐量、高带宽和高安全性的应用(如ADAS功能,包括完全自动驾驶)来说,尤其如此。
尽管以太网在车辆应用中具有明显的优势,但在对通信速率要求不高的场景(如车窗开启、后视镜折叠、调整座椅等)仍将继续使用现有协议(如LIN和CAN)。不过,我们已经看到以太网正在取代CAN的部分市场份额,预计到明年,以太网将成为低延迟和高带宽通信的首选技术。
总结
如今,车辆性能已不再取决于其行驶速度,而更多地取决于车载网络在"车轮上的计算平台"中数据传输的速度。
虽然LIN和CAN等传统协议将继续发挥有限的作用,但MOST和FlexRay等一些协议将逐步淘汰。由于区域控制架构降低了布线的成本和重量,将成为首选,但还需要应用TSN和更大的带宽,特别是在区域之间的主干网上。
确定性以太网(10BASE-T1S)将发挥重要作用,在不久的将来成为许多汽车制造商默认的"首选"技术。该技术的广泛应用将推动车载网络标准化程度的提高,实现全自动驾驶所需的创新解决方案也成为可能。此外,目前只有以太网解决方案才能推进提高车辆安全性和先进自动驾驶系统的实现。
几十年来,安森美一直在汽车技术领域发挥着重要作用,尤其是在车载网络方面。虽然LIN和CAN在器件方面将继续取得进展,但安森美目前的主要重点是开发更丰富的10BASE-T1S以太网解决方案,为汽车行业提供满足下一代汽车应用所需的高性能元器件。
-
安森美分析无人机市场发展趋势2025-06-27 816
-
工业电机行业现状及未来发展趋势分析2025-03-31 362
-
探讨智能视频分析技术的应用现状与发展趋势2021-06-03 3236
-
安森美新一代车载方案技术2020-05-06 2290
-
安森美半导体的IoT应用怎么样?2019-08-09 2690
-
宽禁带方案的发展趋势怎么样?2019-07-31 1740
-
LED照明技术的优势及发展趋势2019-03-04 6131
-
安森美半导体Embedded World展示IoT及汽车方案2018-10-11 2552
-
安森美半导体高效节能汽车电子方案配合发展趋势2017-11-22 1186
-
我国智能传感器发展趋势分析!2014-08-04 2434
-
stm8的发展趋势2013-11-04 3890
-
应对电机设计,安森美有何发展趋势及创新方案?2013-04-26 2114
-
安森美新器件用于富于挑战的不同汽车应用2013-01-07 3348
-
安森美车载网络优化方案2011-02-24 1073
全部0条评论

快来发表一下你的评论吧 !
