

BissC绝对值编码器在EtherCAT运动控制器中的应用
电子说
描述
ZMC432-V2硬件介绍
ZMC432-V2是正运动推出的一款多轴高性能EtherCAT总线+脉冲型运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。
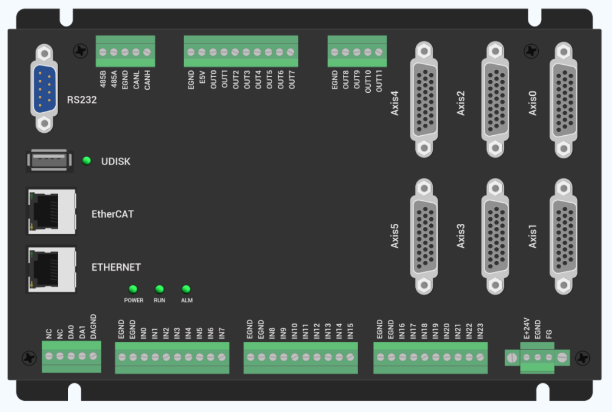 ZMC432-V2运动控制器
ZMC432-V2运动控制器
ZMC432-V2最多可支持32轴运动控制,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。
ZMC432-V2运动控制器包含6轴的脉冲输出与编码器反馈输入,通用IO包含24路输入口和12个输出口;通用DA有两路;其中特定输出口支持高速PWM控制;EtherCAT最快125us的刷新周期。
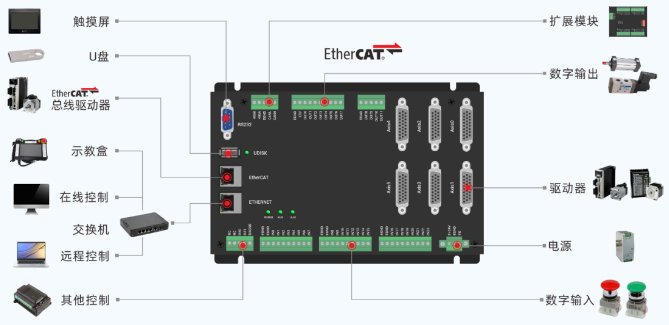 ZMC432-V2控制器架构图
ZMC432-V2控制器架构图
ZMC432-V2支持PLC、Basic、HMI组态三种编程方式。PC上位机API编程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

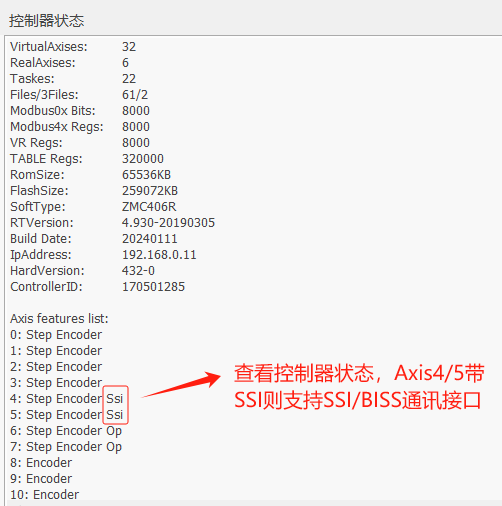
控制器型号要求
(1)控制器型号要求:ZMC432-V2,ZMC406-V2;
(2)固件版本要求:在4.930-20190305以后才支持;
(3)ZMC432-V2系列控制器仅AXIS4/5轴接口支持SSI/BISS通讯。
▶▶▶ ZMC432-V2硬件接口及接线
ZMC432-V2控制器AXIS4/5轴接口支持SSI/BISS通讯协议,只支持5V供电的BissC绝对值编码器,无论BissC绝对值编码器是否使用+5V作为电源,BissC绝对值编码器公共端都必须跟控制器轴接口GND连接。
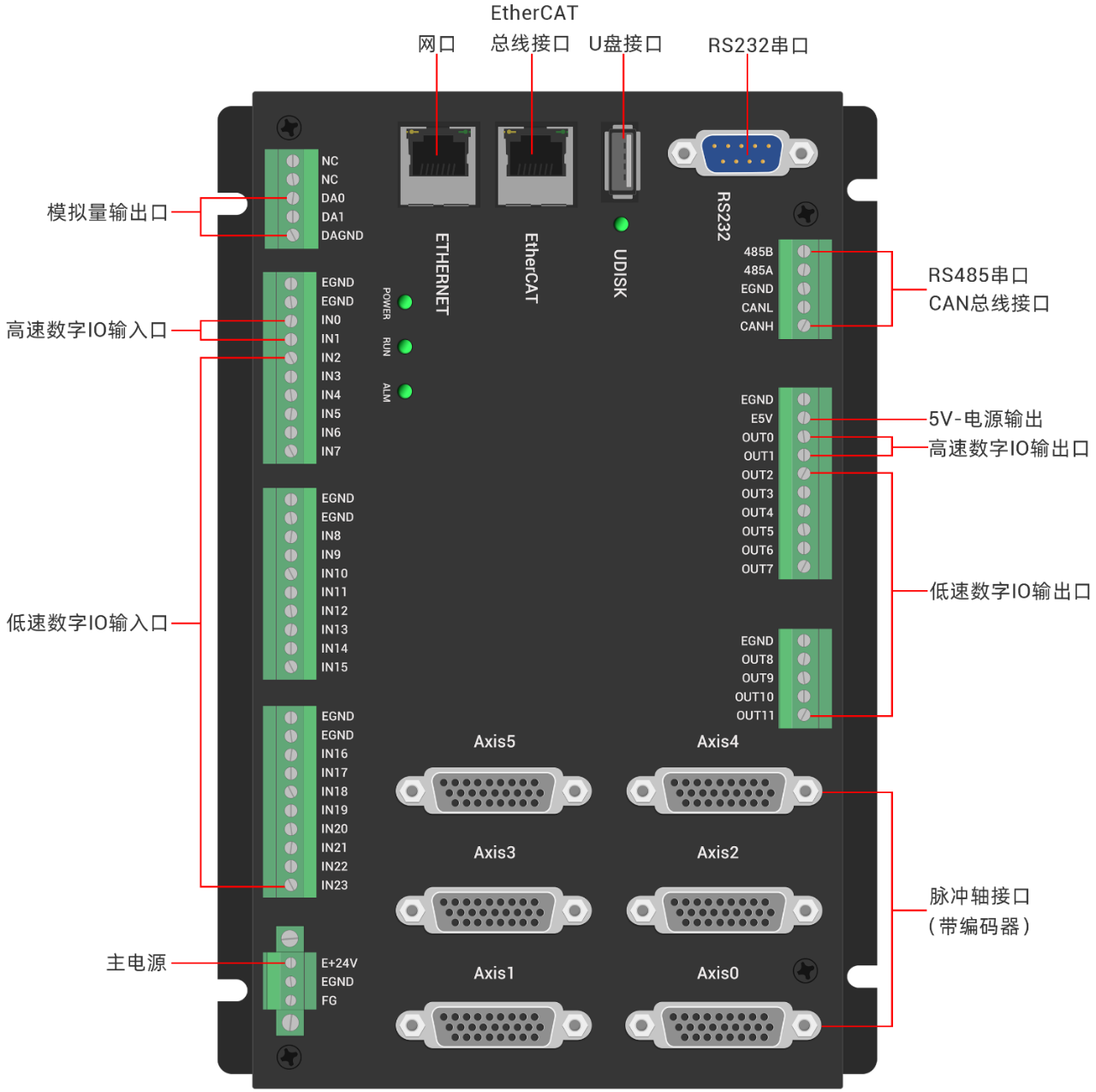 ZMC432-V2控制器接口定义
ZMC432-V2控制器接口定义 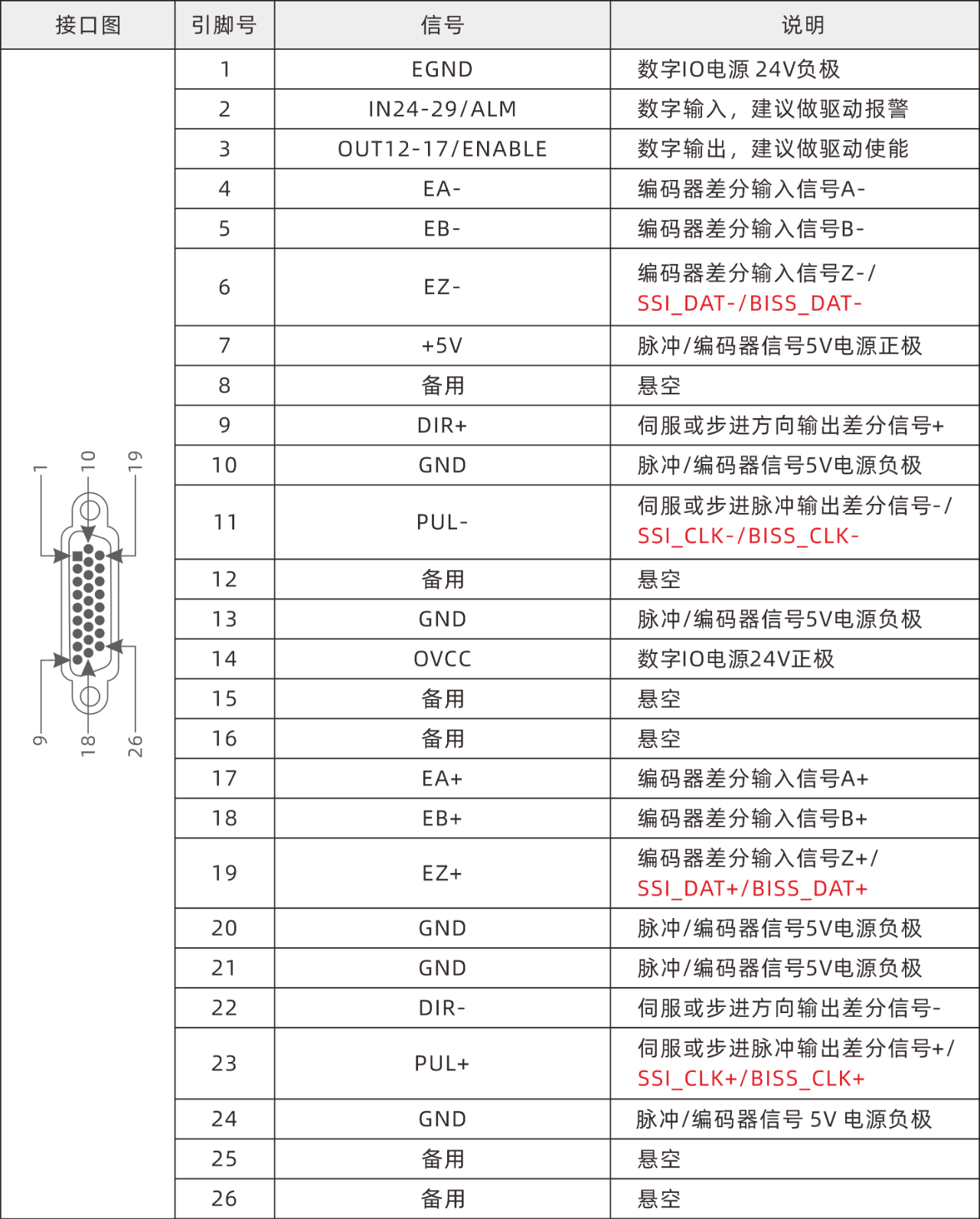 控制器AXIS4/5轴接口SSI/BISS针脚定义图
控制器AXIS4/5轴接口SSI/BISS针脚定义图 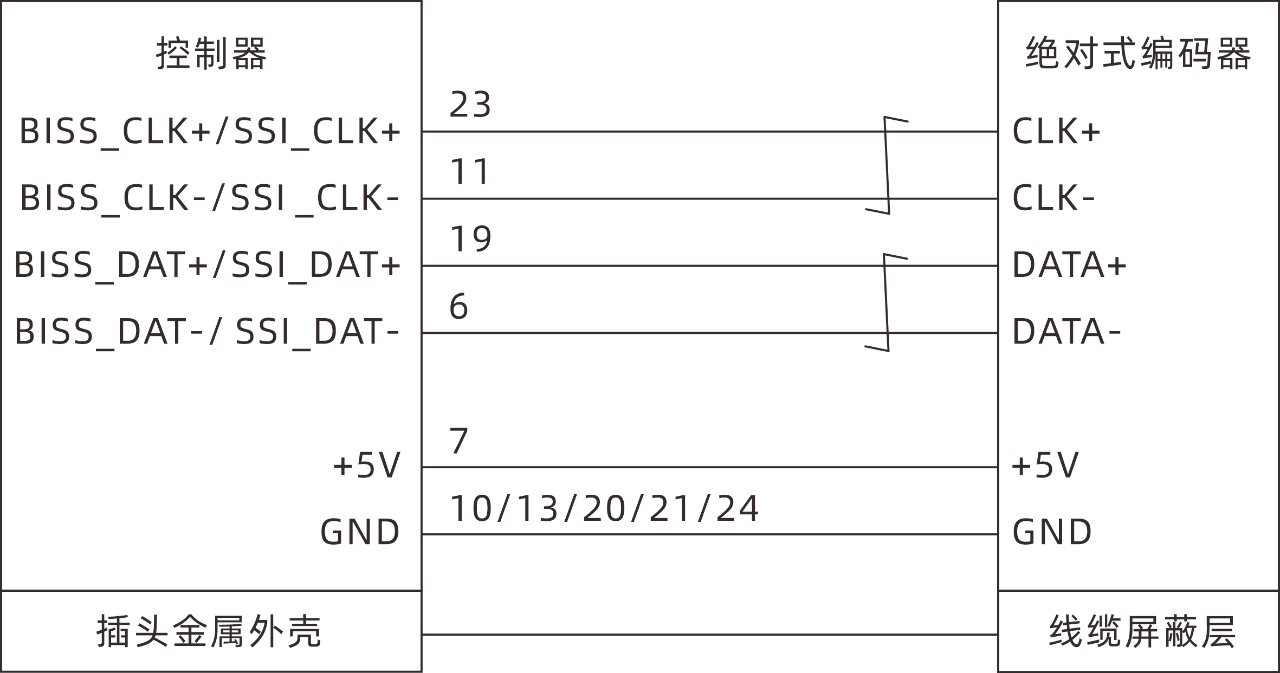 控制器和BissC绝对值编码器接线图
控制器和BissC绝对值编码器接线图
▶▶▶ Bissc绝对编码器介绍
1.认识BissC绝对值编码器
BissC是Binary Synchronous Serial Communication的缩写。它是一种数字式的接口协议。BissC绝对值编码器是一种测量位置和角度的设备,可以通过高频率信号传递出更加准确、精确的位置信息,在工业自动化和控制系统中起着重要的作用。
 BissC绝对值编码器
BissC绝对值编码器  BissC绝对值光栅尺
BissC绝对值光栅尺
2.BissC通讯原理
BissC是一种用于运动控制与绝对式编码器之间进行数据交换的通信协议。它采用快速双工同步串行接口模式,具有主-从接口的特点。
在BissC协议中,主接口负责控制位置获取的时序和数据传输速度,而编码器则作为从接口,负责响应主接口的位置采集请求。
(1)数据传输通过两对单向差分线进行,分别是Clock线和Data线。
(2)Clock线用于将位置采集请求和时序信息从主接口传输至编码器。
(3)Data线则用于将位置数据从编码器传输回与Clock线同步的接口。
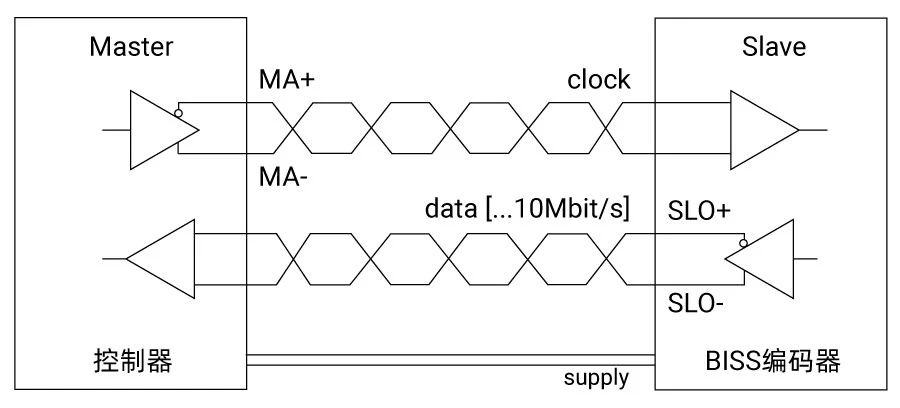 BISS接口示意图
BISS接口示意图
▶▶▶ 控制器程序配置及应用
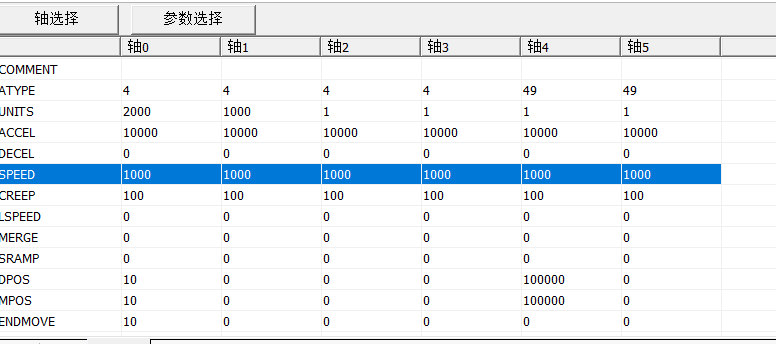
1.控制器参数说明
(1)ATYPE:设置轴类型,设为48是SSI绝对值编码器,设为49是BISS绝对值编码器。
(2)UNITS:设置脉冲当量,以BissC绝对值光栅尺为例,分辨率在100nm,那么1个脉冲对应100nm,1mm则对应10000个脉冲,控制器需要参考这个参数去设置该轴的脉冲当量UNITS。
(3)ENCODER_BITS:设置SSI/BISS编码器绝对值位数,参考BissC绝对值编码器手册数据位。有的BissC绝对值编码器会多一些辅助状态位,厂家也不是完全标准,一般是18-20位,需要手动调整ENCODER_BITS。ENCODER_BITS=数据位+辅助状态位(有的编码器不带)。
(4)ENCODER_BITS指令参数设定说明:
| 位 | 值 | 功能描述 |
| BIT 0-5 | 0-63 | 编码器通讯总位数,数据位+辅助状态位(有的编码器没有) |
| BIT 6 | 64*(0≤n≤1) | 是否是格雷码 |
| BIT8-11 | 256*(0≤n≤15) | 无效的位数, BISS一般=8 |
| BIT16-18 | 65536*(0≤n≤7) | 频率分频调整, 缺省0- 2MHZ. |
2.程序配置
global CONST ENC_AxisStart = 4 '本地绝对值编码器轴起始轴号 global CONST ENC_AxisNum = 2 '本地绝对值编码器轴轴数量 '本地绝对值编码器轴配置 for i = 0 to ENC_AxisNum - 1 BASE(ENC_AxisStart + i) AXIS_ADDRESS=(-1< <16)+4+i '映射绝对值编码器轴4,5 ENCODER_BITS = 51 '32位绝对值, 带19个辅助状态位. ATYPE=49 'BISS绝对值编码器 Next
3.零点设置
(1)一般光栅尺用零点配置工具去设置零点位置。

(2)一般旋转绝对值编码器通过信号去设置零点位置。
(3)其它方式去设置零点位置,咨询编码器厂家。
4.绝对值编码器位置读取
在零点位置进行编码器位置清零后,设置UNITS,读轴4/5的MPOS值就知道编码器的当前位置,需要编码器原始值就读轴4/5的ENCODER。BissC绝对值编码器位置具有断电保存功能。
 轴4BissC绝对值编码器位置MPOS
轴4BissC绝对值编码器位置MPOS 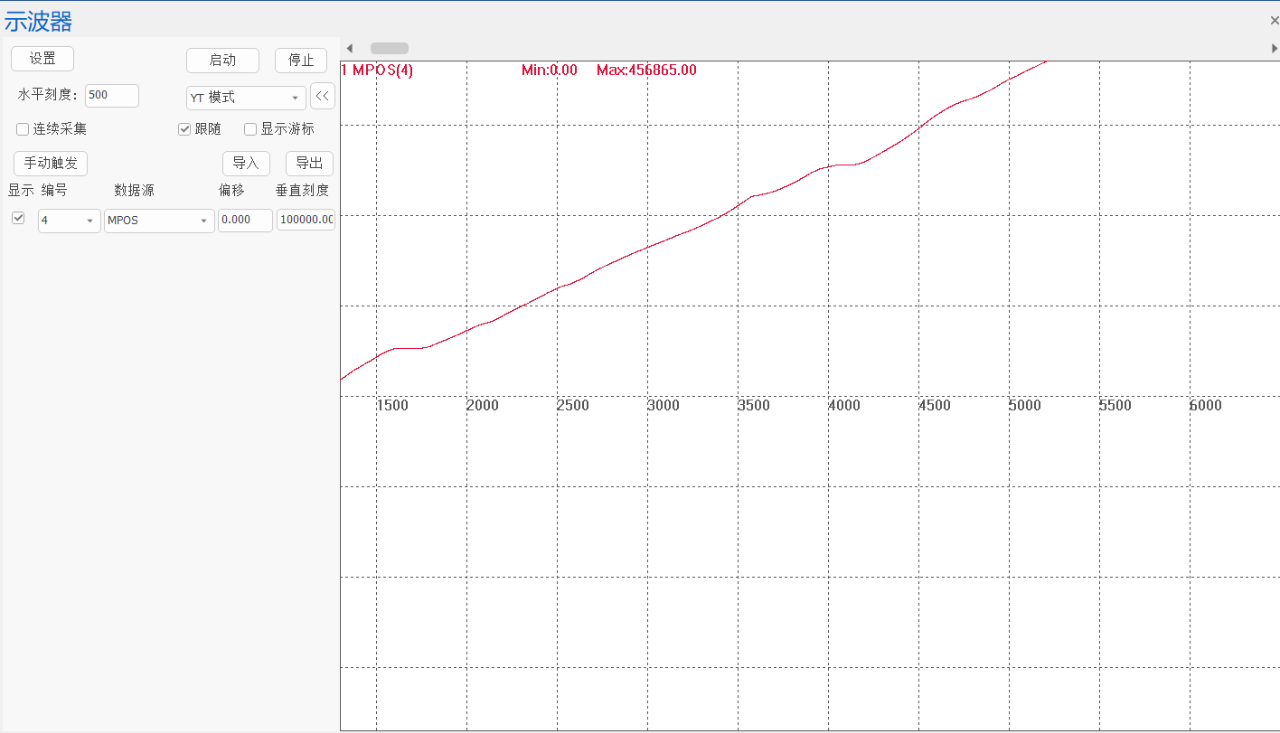 手动旋转BissC绝对值编码器示波器抓取位置曲线
手动旋转BissC绝对值编码器示波器抓取位置曲线
常见问题
1.下载程序提示轴4/5报设置atype49错误
检查控制器固件版本支不支持ssi/biss绝对值编码器,固件版本20190305以后才支持ssi/biss绝对值编码器。
2.轴4/5的MPOS没有值,或值不对
检测接线问题。encoder_bits参数设置问题,手动调整状态位。在线命令?* encoder_bits,检查该参数是否设置有有效。
本次,正运动技术BissC绝对值编码器在EtherCAT运动控制器中的应用,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
绝对值编码器是什么?有哪些特点呢2024-12-17 2987
-
增量编码器与绝对值编码器的区别2024-11-18 4498
-
SSI绝对值编码器在EtherCAT运动控制器中的应用2024-10-09 2875
-
绝对值编码器的工作原理及其在电机控制中的应用2024-05-21 3073
-
EtherCAT信号绝对值编码器的定义和应用2023-11-08 2439
-
一体式伺服中的编码器起什么作用?什么时候使用多圈绝对值编码器?2023-10-23 3178
-
绝对值编码器:输出信号与误差分析2023-10-07 3890
-
增量式编码器和绝对值编码器有哪些区别?2023-07-05 6305
-
单圈绝对值编码器2023-04-25 5122
-
什么是绝对值编码器?2023-03-24 6620
-
增量式编码器和绝对值编码器选哪个?2023-03-19 5593
-
为什么伺服厂家都爱选绝对值编码器?2023-03-13 2768
-
绝对式编码器的特点_绝对值编码器应用2019-11-06 14489
-
绝对值编码器安装2018-12-06 14423
全部0条评论

快来发表一下你的评论吧 !
