

分析机器人离线编程误差来源
机器人
554人已加入
描述
随着机器人应用领域越来越广,传统的示教编程这种编程手段有些场合变得效率非常低下,于是离线编程应运而生,并且应用越来越普及。但初用离线编程的朋友,总会被最后生成轨迹的误差所困惑,而导致这些误差的原因,包括前几期谈到的TCP、工件较准,还有另一个,那就是机器人绝对定位误差。
下面我们就总结一下离线编程中误差的来源以及如何使这些误差最小化。
【误差来源一:TCP测量误差】
首先就要说说TCP了,想必看过小萌文章的伙伴们对此都不陌生了。TCP就是工具中心点,如果机器人工作连自己拿着的工具的中心点都找不到在哪里,可想而知这个误差有多大。所以我们就要对TCP进行测量,测量后我们要将误差控制在认可范围内,然后对其测量结果进行验证,可以在固定点处进行重定位操作,检验机器人在固定点处进行多姿态运动时是否在规定误差范围之内。
这就对离线编程软件提出了要求,在离线编程软件中,可以输入测量的真实TCP,这些必备功能,在像RobotArt,RobotMaster这些国内外一线品牌中,都是基础功能。
【误差来源二:工件几何与定位误差】
其次就是工件误差了,有两方面:
一方面是工件模型的误差,本质是要保证离线编程环境中的虚拟模型尺寸与真实世界中是完全一样的。所以需要提高工件的精度以减少因工件本身而产生的误差。
另一个就是工件位置的误差。以国内的离线编程软件RobotArt为例,软件中提供的“工件校准”功能,就是为了消除这个误差。通过三点法做过的工件校准,能满足基本的精度要求。对于高精度的应用情况,为了减少工件位置的误差我们可以不仅仅只测三个点,我们可以测量工件上的多个点这样同样也可以进一步减小误差。这个功能RobotArt比RobotMaster做的好用多了,为国产软件点个赞!
【误差来源三:机器人装配与绝对定位误差】
最后就是机器人误差了,也有两个方面:
一方面是机器人本身在加工与装配过程中所产生的误差,这就导致了最后生成出来的机器人,与其设计时的DH参数不可能完全一样,正如世界上没有两片完全一样的树叶,世界上也没有两个完全一样的机器人。
另一方面就是机器人绝对定位误差。所有机器人厂家都没有跟你讲过的一个事实。在各大机器人公开的标称参数中,都是重复定位精度,可以达到0.05mm,或者0.02mm,但不会有一家提供绝对定位精度的。绝对精度就是指实际值与理论值的一致程度。我们控制让机器人移动到每个目标点,机器人实际到达点与目标点之间存在着一定的距离误差。比如下图中,我们给定相同的坐标X,Y,Z,让机器人三次以不同的姿态指向它,结果竟是这样不靠谱,让当年年少的小萌对机器人的崇拜之心碎了一地。但情况其实并没有那么糟,这种绝对误差只有在机器人极限的姿态下才会比较大,而舒服的姿态时,误差相对比较小,而且也是因“人”而异。
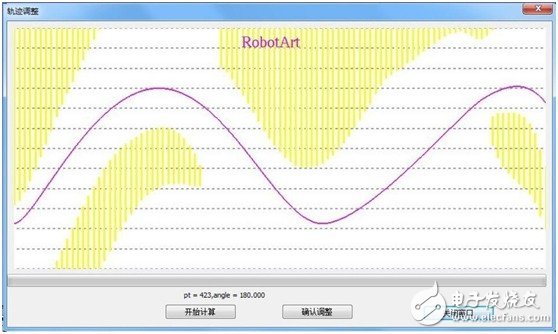
在RobotArt离线编程软件中,对这个问题做了“迁就”,就是在轨迹优化时,会尽量把轨迹姿态优化到“舒服”的位置,同时提供了二次定位的方法来充份利用重复定位精度等手段,来尽量消除这方面的误差。下图是RobotArt的轨迹优化功能,通过调整轨迹分析曲线,让轨迹分析工线越平滑,机器人的姿态就越“舒服”,由机器人本体产生的绝对定位误差就越小。
通过消除以上三方面的误差来源,可以使离线编程的精度大大提高,从而可以使机器人很好的应用于打磨、去毛刺、切割、喷涂等复杂轨迹领域。作为国内第一品牌商业化机器人离线编程软件的RobotArt,正式推出后,彻底打破了国外软件垄断的局面,大大降低了国内机器人应用的成本,同时为国内机器人应用提供了更好的服务。我们期待国人能够做出更多类似RobotArt这样优秀的机器人离线编程软件。
打开APP阅读更多精彩内容
下面我们就总结一下离线编程中误差的来源以及如何使这些误差最小化。
【误差来源一:TCP测量误差】
首先就要说说TCP了,想必看过小萌文章的伙伴们对此都不陌生了。TCP就是工具中心点,如果机器人工作连自己拿着的工具的中心点都找不到在哪里,可想而知这个误差有多大。所以我们就要对TCP进行测量,测量后我们要将误差控制在认可范围内,然后对其测量结果进行验证,可以在固定点处进行重定位操作,检验机器人在固定点处进行多姿态运动时是否在规定误差范围之内。
这就对离线编程软件提出了要求,在离线编程软件中,可以输入测量的真实TCP,这些必备功能,在像RobotArt,RobotMaster这些国内外一线品牌中,都是基础功能。
【误差来源二:工件几何与定位误差】
其次就是工件误差了,有两方面:
一方面是工件模型的误差,本质是要保证离线编程环境中的虚拟模型尺寸与真实世界中是完全一样的。所以需要提高工件的精度以减少因工件本身而产生的误差。
另一个就是工件位置的误差。以国内的离线编程软件RobotArt为例,软件中提供的“工件校准”功能,就是为了消除这个误差。通过三点法做过的工件校准,能满足基本的精度要求。对于高精度的应用情况,为了减少工件位置的误差我们可以不仅仅只测三个点,我们可以测量工件上的多个点这样同样也可以进一步减小误差。这个功能RobotArt比RobotMaster做的好用多了,为国产软件点个赞!
【误差来源三:机器人装配与绝对定位误差】
最后就是机器人误差了,也有两个方面:
一方面是机器人本身在加工与装配过程中所产生的误差,这就导致了最后生成出来的机器人,与其设计时的DH参数不可能完全一样,正如世界上没有两片完全一样的树叶,世界上也没有两个完全一样的机器人。
另一方面就是机器人绝对定位误差。所有机器人厂家都没有跟你讲过的一个事实。在各大机器人公开的标称参数中,都是重复定位精度,可以达到0.05mm,或者0.02mm,但不会有一家提供绝对定位精度的。绝对精度就是指实际值与理论值的一致程度。我们控制让机器人移动到每个目标点,机器人实际到达点与目标点之间存在着一定的距离误差。比如下图中,我们给定相同的坐标X,Y,Z,让机器人三次以不同的姿态指向它,结果竟是这样不靠谱,让当年年少的小萌对机器人的崇拜之心碎了一地。但情况其实并没有那么糟,这种绝对误差只有在机器人极限的姿态下才会比较大,而舒服的姿态时,误差相对比较小,而且也是因“人”而异。
在RobotArt离线编程软件中,对这个问题做了“迁就”,就是在轨迹优化时,会尽量把轨迹姿态优化到“舒服”的位置,同时提供了二次定位的方法来充份利用重复定位精度等手段,来尽量消除这方面的误差。下图是RobotArt的轨迹优化功能,通过调整轨迹分析曲线,让轨迹分析工线越平滑,机器人的姿态就越“舒服”,由机器人本体产生的绝对定位误差就越小。
通过消除以上三方面的误差来源,可以使离线编程的精度大大提高,从而可以使机器人很好的应用于打磨、去毛刺、切割、喷涂等复杂轨迹领域。作为国内第一品牌商业化机器人离线编程软件的RobotArt,正式推出后,彻底打破了国外软件垄断的局面,大大降低了国内机器人应用的成本,同时为国内机器人应用提供了更好的服务。我们期待国人能够做出更多类似RobotArt这样优秀的机器人离线编程软件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 离线编程
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
【机器人在线】工业喷涂机器人误差修正方法发展趋势2017-07-13 2798
-
Motoman机器人离线编程2021-09-07 2325
-
分析机器人离线编程误差来源2016-10-26 297
-
国内首款机器人离线编程软件RobotArt2017-01-06 10596
-
基于关节型机器人运动误差分析2017-10-12 1232
-
工业机器人这两种编程区别你知道吗?(示教编程与离线编程的区别)2018-03-05 21472
-
为工业机器人编程的主流离线编程软件2018-04-02 11830
-
机器人离线编程与机器人编程趋势2018-05-10 7152
-
关于工业机器人离线编程与仿真软件的介绍2018-07-28 10777
-
浅析机器人离线编程软件的优势和主流编程软件的功能及优缺点2018-09-25 15377
-
国内外工业机器人离线编程软件有何差距2018-10-24 11708
-
全球七大工业机器人离线编程软件大PK2019-05-13 9985
-
工业机器人示教编程与离线编程的区别2020-09-25 7712
-
解析工业机器人的主流离线编程软件2020-12-26 2176
全部0条评论

快来发表一下你的评论吧 !
