

 VPLC系列机器视觉运动控制一体机在五轴联动点胶上的应用
VPLC系列机器视觉运动控制一体机在五轴联动点胶上的应用
电子说
描述
市场应用背景
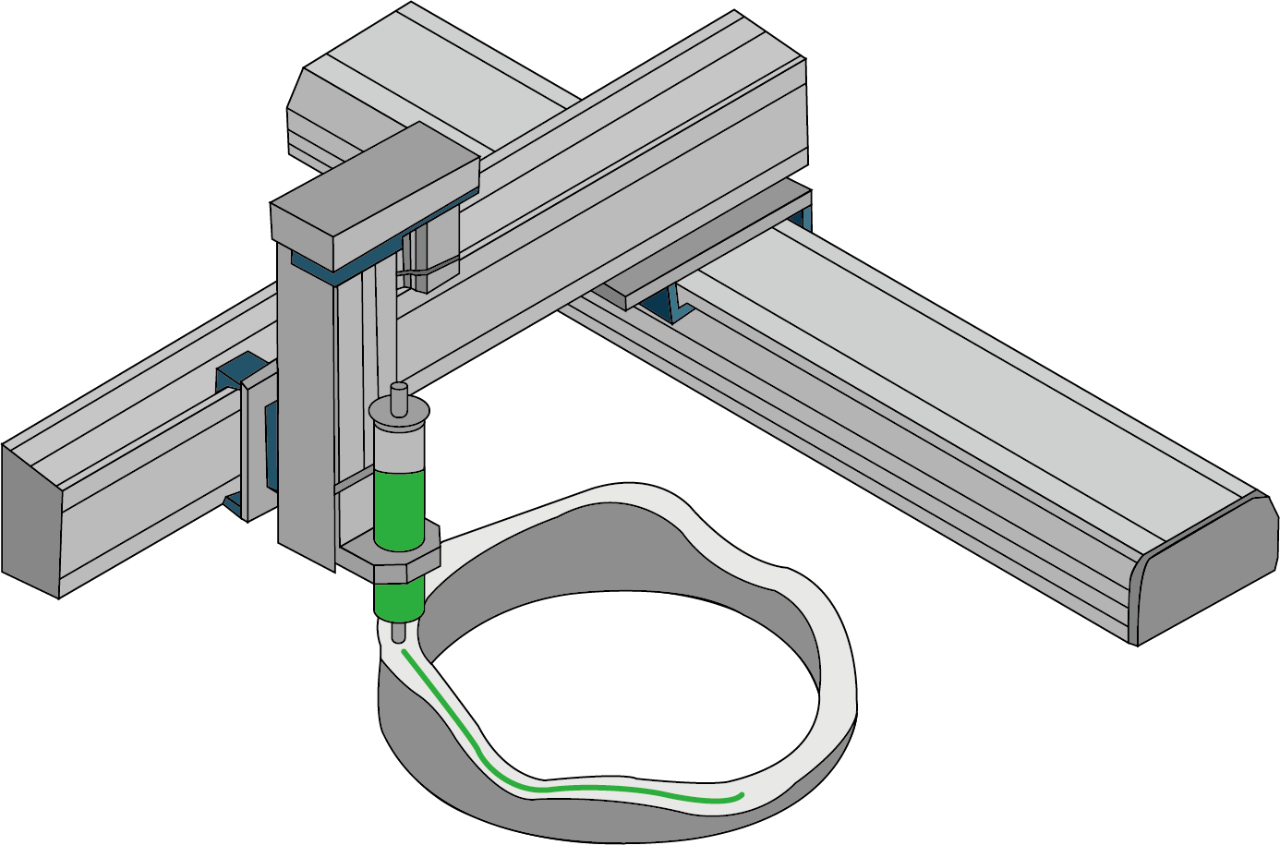
在各类手机中框、VR/AR边框、异形屏/曲面屏、智能手表手环等3C消费电子产品的复杂型面点胶加工过程中,市面上常见的直角坐标型点胶机已无法满足工件在被其他部件遮挡的倾斜、弯曲或边缘表面位置进行精准点胶操作,导致点胶头无法到达固定加工区域或难以一次完成点胶任务,进而影响产品的整体点胶质量。
为解决复杂型面点胶路径中胶阀与工件的干涉问题,胶阀须与产品表面形成特定夹角,保证与点胶路径切线垂直且相对线速度恒定。适应异型工件需多维度调整胶阀相对姿态。
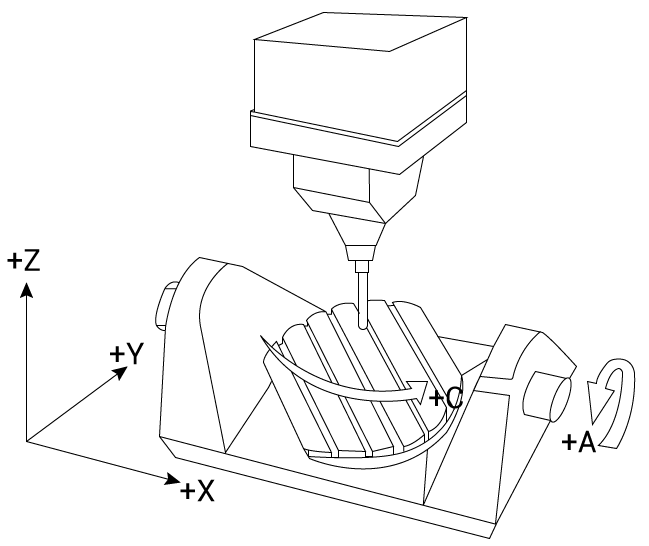
五轴联动点胶机结合直线轴X、Y、Z及旋转轴A、B,实现点胶阀到达复杂型面加工的空间控制,执行高精度的点胶任务,成为对于存在点胶路径复杂型面的产品的最佳选择。
三轴、四轴点胶机方案局限性:
这类点胶机的移动方式是基于直角坐标系统,适合执行直线或轻微曲面任务的点胶任务。不适合加工具有狭窄腔内、斜面等复杂型面工件。
灵活性和适应性:在点胶加工过程中,点胶阀与工件的位姿和角度不能动态调整,因此通常仅适用于处理基本形状和几何形状的加工路径任务。但对于具有复杂型面的工件,其灵活性和适应性受到限制。
精度和效率:当遇到需要在多个空间曲线或复杂型面上进行点胶的任务时,可能需要使用多台设备并进行多次定位安装。这不仅增加了生产成本,加工工序多,也降低了整体点胶加工效率,同时多次参数设定和校准可能导致丢失部分点胶精度。
正运动技术解决方案:
正运动技术针对现有市场需求,开发了一种基于VPLC系列机器视觉运动控制一体机的五轴联动点胶解决方案,适用于各种复杂型面工件的高精度点胶和各种胶水。
方案方案采用RTCP刀具中心点跟随技术算法,可实现各类空间轨迹的追随控制,实现点胶阀或工件边点胶边倾斜调整角度,点胶轨迹路径始终与产品翻转姿态保持一致,确保了点胶加工过程的连续性和平滑性,还显著提高了空间曲面点胶加工的精度、质量和效率。
方案同时减少了复杂型面工件的点胶加工工序,可通过集中处理多个工序,实现高速高精的点胶加工,简化了生产流程,更好地灵活适应复杂型面工件的点胶生产需求。

一、机器视觉运动控制一体机在五轴联动点胶上的应用
正运动五轴联动点胶解决方案设计
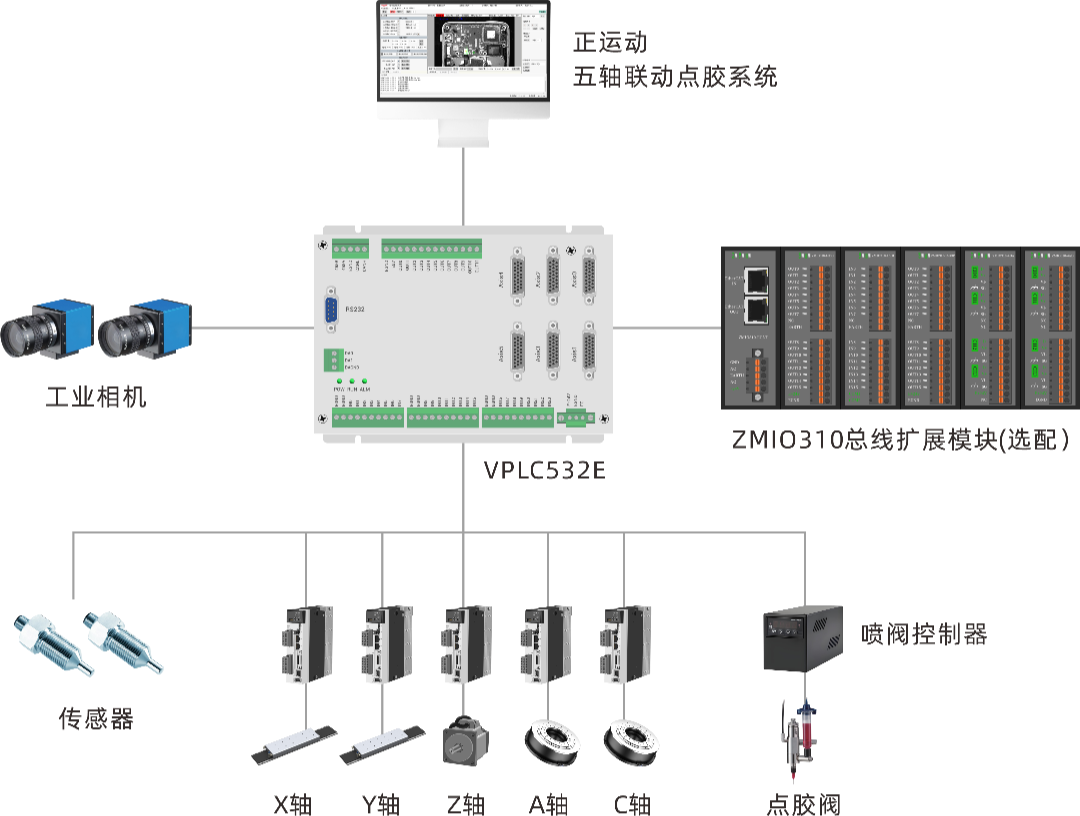
24DI:接原点、限位、测高等传感器,以及开关信号、编码器等;
12DO:高速输出口接工业相机的硬触发输入和点胶阀;
EtherCAT接口:接EtherCAT总线驱动器,控制其它轴运动;
6路差分脉冲输出:接脉冲驱动器,控制X、Y、Z、A、C轴;
RS232通讯接口:接光源控制器;
EtherNET接口:千兆网口,接支持Gige协议的面阵相机,实现视觉定位应用。
运动控制与机器视觉实现过程
(1)机器视觉
机器视觉系统负责自动检测工件的点胶位置,流程包括图像采集、视觉定位和位置坐标输出。控制器处理所采集到的图像,拟合出点胶区域轮廓的模板特征。根据胶点中心与点胶区域轮廓的相对位置,系统自动计算并补偿旋转轴引起的点胶头偏移的坐标数值,确保点胶头准确移至预定的点胶位置。

(2)运动控制
系统具备RTCP(旋转刀具中心点控制)功能,确保在多轴联动操作中,点胶头始终精确对准工件的特定位置,即使在工件或工具自身旋转时也能保持恒定的相对姿态和角度。
在运动控制过程确保C轴在校准时保持零点位置。通过机械平台的水平方向角度校准来标定A轴,并进行旋转中心标定。手动示教三点坐标,并记录不同姿态的角度,之后计算并执行联动路径。
在建立正运动机械手的五轴联动指令时,首先配置机械结构参数。完成运动点位编程后,通过相机中心或针头示教点胶路径,并在XYZ三轴点位的基础上调整空间角度和姿态。同时通过激光测高传感器测定作业区域高度,以Z轴坐标补偿的方式保持点胶头与作业区域表面距离的相对恒定。
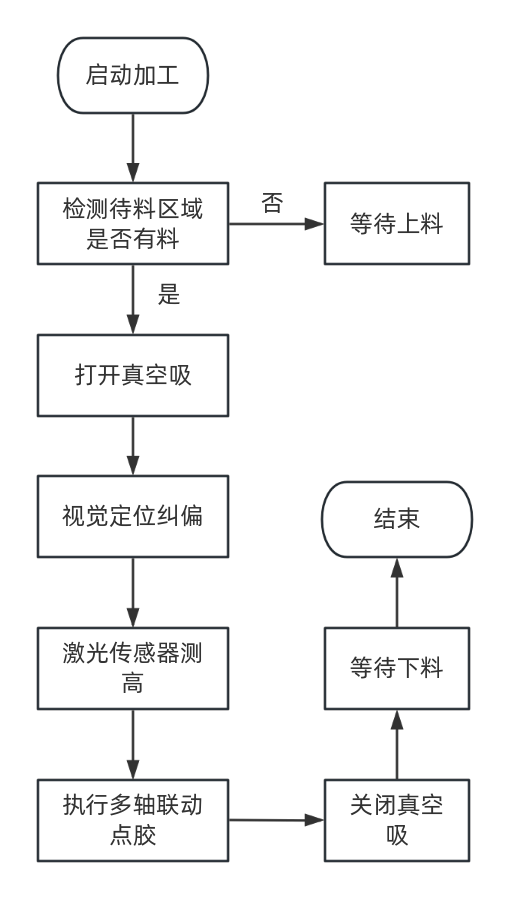
五轴联动点胶工艺流程
方案核心优势
RTCP刀具中心点跟随技术算法,可实现各类空间轨迹的追随控制;
具备五轴应用相机标定、针头补偿及各姿态下的位置拾取功能;
结合视觉与运动控制,无需额外配置工控机,从而节约硬件成本并减少安装空间;
可分段设定加工速度,来满足不同胶水类型和加工需求的平顺点胶;
支持双旋转台水平校准和偏移校准;
小线段平滑控制,满足插补轨迹精度同时保证效率;
提前开/关胶控制、位置比较触发和空间轨迹的坐标转换功能,优化点胶过程,减少胶水浪费;
集成小型化组态平台,可支持用户自定义人机交互界面的开发编程,提高用户友好性和操作便利性。

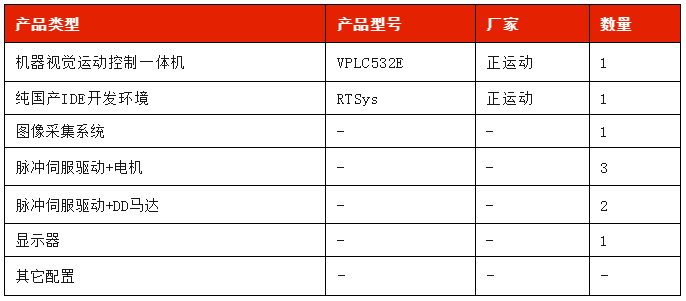
解决方案硬件配置
二、机器视觉运动控制一体机VPLC532E
正运动技术VPLC系列机器视觉运动控制一体机是一款基于Linux系统的EtherCAT总线视觉运动控制器,可脱机运行,内置了丰富的视觉和运动控制功能,大幅简化视觉与运控项目的配置流程,核内数据交互快,可显著降低时间和成本投入。
VPLC系列机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)无缝集成,提供一个完整端到端的视觉运动控制解决方案。
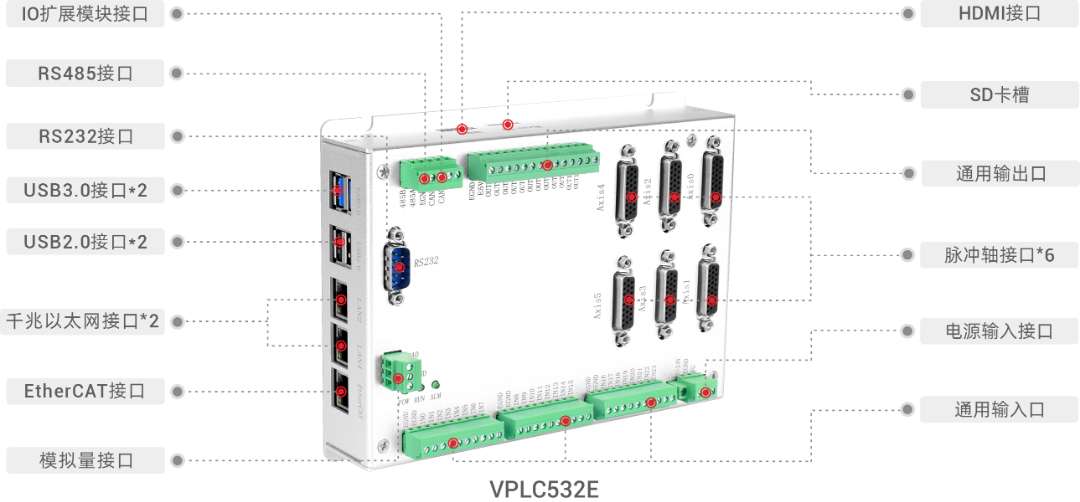
VPLC532E机器视觉运动控制一体机,本身最多支持32轴,支持24+6数字输入,12+6数字输出,4路高速锁存输入,4路高速PWM和PSO硬件输出,自带6路高速脉冲轴+编码器反馈,速度可达10M。
三、提供易用的可视化视觉点胶开发调试软件

正运动技术通过不断深化扩展VPLC系列视觉运动控制一体机在点胶行业的应用,为用户提供了简单易用的视觉点胶开发调试软件。该软件结合可视化界面和丰富的视觉、运动控制功能,只需进行简单的参数设置,即可构建视觉点胶项目程序,可大幅缩短项目开发周期,降低开发成本。
视觉点胶开发调试软件功能介绍
1.功能齐全
支持点胶轨迹打点、线、圆、弧、连续线段、阵列、提前开关胶、手动示教、相机示教、点胶工艺功能。
2.机器视觉纠偏
产品任意位置和角度摆放,视觉自动识别并完成点胶、喷胶作业。
3.操作界面友好功能齐全
调试编程操作简单便捷,支持在视觉图像上进行示教和点动运动。
审核编辑 黄宇
-
机器视觉运动控制一体机在视觉点胶滴药机上的应用2025-04-10 1233
-
高集成机器视觉运动控制一体机VPLC712!2024-12-20 1453
-
机器视觉运动控制一体机在DELTA并联机械手视觉上下料应用2024-10-24 1992
-
机器视觉运动控制一体机VPLC532E在汽车胶带缠绕的开放式CNC应用2024-08-19 1260
-
VPLC系列机器视觉运动控制一体机在五轴联动点胶上的应用# 五轴联动# 运动控制器# 正运动技术# 机器视觉正运动技术 2024-07-29
-
机器视觉运动控制一体机在喇叭跟随点胶上的应用2024-04-16 17220
-
VPLC711视觉运动控制一体机用户手册2023-08-14 751
-
VPLC系列机器视觉运动控制一体机快速入门(十)2021-11-08 2129
-
VPLC系列机器视觉运动控制一体机快速入门(九)2021-10-18 1598
-
VPLC系列机器视觉运动控制一体机快速入门(八)2021-10-14 2199
-
VPLC系列机器视觉运动控制一体机快速入门(六)2021-09-29 1638
-
VPLC系列机器视觉运动控制一体机快速入门(五)2021-09-26 2040
-
VPLC系列机器视觉运动控制一体机快速入门2021-03-12 3448
全部0条评论

快来发表一下你的评论吧 !
