

基于模糊神经网络的机器人位置控制系统设计
机器人
描述
近几年来,随着机器人技术与控制技术的发展,机器人在日常生活和工农业生产中得到广泛应用。机器人对象是一个非线性、强耦合的多变量系统,在运动过程中。由于存在摩擦、负载变化等不确定因素,因而它还是一个时变系统。传统的机器人控制技术大多是基于模型的控制方法,无法得到满意的轨迹跟踪效果模糊控制和神经网络等人工智能的发展为解决机器人轨迹跟踪问题提供了新的思路。普通模糊控制的控制规则大部分是人们的经验总结。不具备自学习、自适应的能力,往往还受到人的主观性的影响。因此不能很好地控制时变不确定的系统。
在近几十年里,基于模糊逻辑开发的模糊系统已经成为非常活跃的领域,一些算法已在复杂系统的控制器设计中显示出相当的能力,而且模糊数学理论也对构造知识模型提供了极其优越的工具。
由于神经网络具有良好的自学习、自适应、联想等智能,能适应系统复杂多变的动态特性。模糊控制和神经网络的结合成为学者研究的重点。这方面的研究最早起源于欧美国家,但在80年代末期却在日本取得了相对大的发展。目前,在知识和信息处理领域,他独立于模糊逻辑和神经网络技术,已经达到了一个特有的研究阶段。模糊和神经网络技术的融合客服了神经网络和模糊逻辑在知识处理方面的缺点,具有进行数据监督学习、处理经验知识及基于语言表达的在线学习等功能。利用神经网络非线性映射、自学习能力来调整模糊控制。使模糊控制具有一定的自适应能力,同时也使神经网络获得了模糊控制的推理归纳能力。本文对模糊神经网络在机器人控制中的应用进行研究,提出了一种模糊神经网络的机器人轨迹跟踪控制。仿真结果表明,该控制方法能很好地对机器人轨迹进行跟踪。
机器人控制系统建立
本系统中,立体定位系统作为主要数据输入通道,用于精确获取目标位置与机器人之间精确的相对位置。随后将这些现场实时空间信息融入先前建立的空间模型。期间需要确定前模型与实际的三维空间变换关系,即配准。
然后,机器人根据计算机辅助系统制定的运动计划进行运动操作。运动中,立体定位系统通过对机器人与目标空间位置的不断采集,结合机器人多轴控制器进行视觉控制。机器人控制系统如图1所示。框图中输入为机器人行走驱动伺服电机的反馈电流,输出为机器人的行走速度,由伺服调速实现。
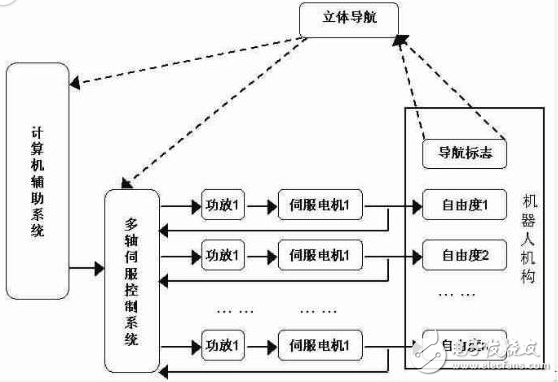
图1 机器人控制系统
本文设计的机器人为六自由度机器人:三个转动三个平动。机器人的六自由度协同完成空间运动。考虑到设计的机器人属于小型机器人,希望尽量减轻重量。这样一来,由于刚度下降而要求限定机构整体负载,同时还要考虑机构高速运动时的稳定性。而且,该多自由度机构的刚度设计取决于运动的速度与方向。
模糊神经网络
2.1控制系统结构
结合机器人定位系统构建控制系统结构如图2所示,将机器人位置作为被控制量。
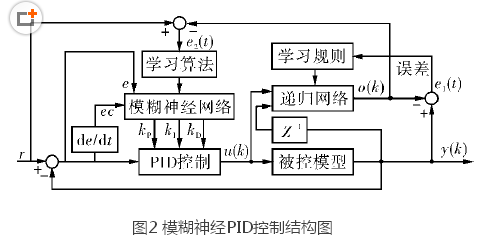
图中e和ec分别为误差和误差变化率,输入r为机器人位置,输出y为机器人实际输出。
2.2 模糊神经网络的结构
该模糊神经网络为4层,如图3所示。第l层为输入层;第2层为模糊化层;第3层为模糊推理层;第4层为输出层。模糊神经网络结构为2–6–6–3。
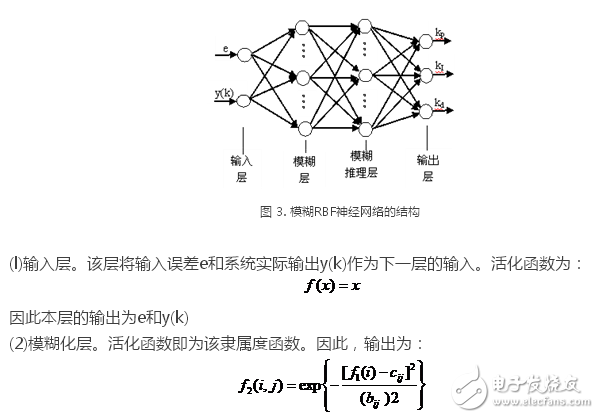
其中,i=l,2;j=l,2,。。.6。cij和bij分别为高斯函数第i个输入变量的第j个模糊集合的隶属函数的均差和标准差。
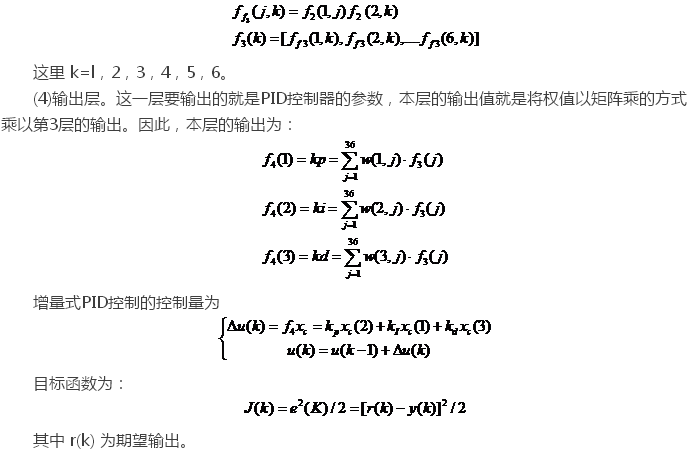
(3)模糊推理层。将上层中的模糊量经过两两相乘,得到这一层的输出值。因此,本层的活化函数,即输出为:
2.3 鲁棒控制器
为保证闭环系统的稳定性和良好的控制效果,实时控制器由一个模糊神经网络控制器NNC和一个鲁棒控制器RC组成。这两个控制器的输出信号通过加权综合后,作为系统的控制输入[8-10],构成一个变鲁棒控制器u(k):
系统仿真研究
为了验证所提出的模糊神经网络控制算法的有效性,在MATLAB中创建模糊神经网络,利用隶属函数和模糊规则将抽象的模糊规则转化为模糊神经网络的训练样本,隐层采用在任意点可微的Tansig作为传递函数,输出层采用常用非负的Sigmoid函数。
采用常规PID控制和模糊神经网络控制时,系统阶跃信号的响应曲线。图3为常规PID控制器和模糊神经网络控制器对正弦信号跟踪的误差响应曲线,通过对比可知:模糊神经网络控制器在动态性能方面明显优于常规PID控制器,可将正弦响应误差从0.02 rad降至0.001 rad。
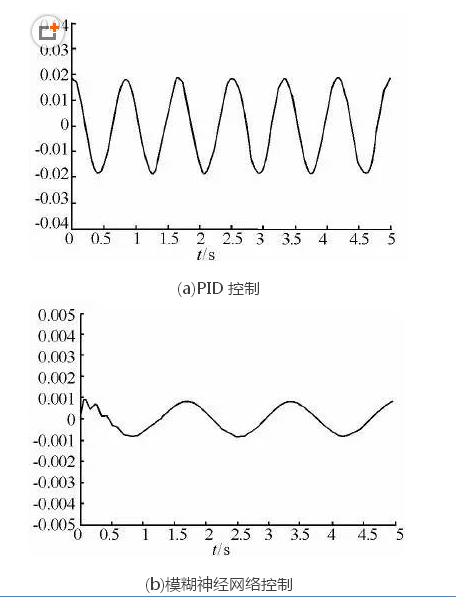
图 3 系统正弦误差响应曲线
结 论
本文将模糊控制与神经网络相结合,设计一种基于模糊神经网络的机器人位置控制系统,并将其运用到机器人轨迹跟踪控制系统中。仿真结果表明,该控制系统能够有效地克服机器人系统中存在的非线性、耦合等因素的影响,是一种很好的控制方法。
-
机器人神经网络系统的特点包括2024-07-09 1749
-
基于模糊神经网络的微型涡喷发动机控制系统2021-06-23 1073
-
基于模糊行为和神经网络的机器人视觉伺服控制2016-09-22 1187
-
基于模糊神经网络的机器人位置控制系统设计详解2016-09-19 1428
-
基于模糊神经网络的RoboCup足球机器人局部路径规划方法研究2016-01-04 1100
-
基于模糊神经网络和PI控制的异步电机位置控制系统2011-09-26 1315
-
神经网络在机器人运动控制中的应用2011-06-28 739
-
基于模糊神经网络的机器人关节驱动补偿控制器2010-03-03 649
-
仿人模糊神经网络控制器的设计和实现2009-12-19 706
-
SCARA机器人自组织模糊聚类神经网络控制器2009-08-04 929
-
基于模糊神经网络的智能火灾报警控制系统2009-06-10 598
-
神经网络模糊系统及其在运动控制中的应用2009-01-13 770
全部0条评论

快来发表一下你的评论吧 !
